

Морской робот-сборщик мусора Jellyfishbot начал уборку воды от мусора и отходов в 15 портах Франции, пишет Independent. Новинку уже экспортировали в Сингапур, Японию и Норвегию.
Туристы, отправившиеся на юг Франции в портовый город Кассис, станут свидетелями не самого приятного зрелища. Они обнаружат пластиковые пакеты, бутылки и медицинские маски, которые плавают в морской воде Лазурного Берега.
Однако сотрудники порта нашли решение проблемы загрязнения. Им стал робот-мусорщик Jellyfish. Устройство ярко-желтого цвета с дистанционным управлением и электроприводом очищает воду от отходов, плавая по гавани и всасывая мусор в сеть, которая крепится к его корпусу.
Робот размером с чемодан может попасть в труднодоступные для уборщиков места, где скапливается мусор.
«Он вездесущ», — говорит создатель Jellyfish, обладатель докторской степени в области подводной робототехники Николя Карлези.
Карлези рассказал, что идея создания робота пришла к нему после того, как он отдыхал рядом с водоемом и заметил, сколько мусора плавает в портовых водах: «Я подумал, почему бы не попытаться облегчить эту трудную, а иногда и неблагодарную задачу по сбору мусора? И мы сделали этого робота».
Jellyfish не единственное устройство в своем роде, замечает Independent. Компания RanMarine, занимающаяся морскими технологиями в Нидерландах, разработала робота под названием Waste Shark, который использовался для уборки мусора в гавани Роттердама. В свою очередь некоммерческая организация Clear Blue Sea в Сан-Диего, Калифорния, разрабатывает прототип робота-сборщика мусора под названием FRED.
Спасти планету от «пластиковой катастрофы» смогут роботы, способные выхватывать пакеты и стаканчики из мусора и доставать хоть из-под земли уже оказавшиеся в природе полимеры
Робототехника активно внедряется в направлениях, которые объединяют под общим названием 3Ds: dirty, dull and dangerous work — «грязная, тупая и опасная работа». Например, мировой рынок роботов-пылесосов и роботов-чистильщиков в 2017 году достиг $1,83 млрд и растет, по данным консалтинговой компании Markets and Markets, на 16% в год.
Обработка мусора — одна из областей, куда в течение последних лет активно приходят робототехнические решения. Число проектов из разных стран исчисляется десятками. Среди них, например, промышленные роботы-сортировщики от финской компании ZEN Robotics и американской AMP Robotics (и тот и другой представляют собой манипуляторы, которые уже работают на нескольких заводах), сортировщик от американской Waste Robotics, способный выхватывать с конвейера пластиковые пакеты с мусором, робот — подводная лодка от Rosalia Project (США), способный собирать мусор на дне водоемов.
«Искусственный интеллект, робототехника и компьютерное зрение позволят в течение десяти лет вывести систему сбора и переработки мусора на такой уровень, который сейчас невозможно представить. Когда подобные технологии будут внедрены в самые разные этапы процесса сбора и переработки мусора (на уровне мусорных контейнеров, домашних корзин, мусоропроводов, грузовиков для сбора мусора, перерабатывающих заводов, кораблей, перевозящих отходы), откроется целая вселенная возможностей извлечь новую ценность из отходов», — сообщил РБК сооснователь CleanRobotics Чарльз Айхэп.
Сырье и энергия
Технологии переработки пластиковых отходов хорошо известны. Одна из них — измельчение пластика на специальных заводах и переплавка его в новое полимерное сырье. « Использование сортированного переработанного пластика фактически не отличается от работы с обычным сырьем, — говорит РБК Кирилл Евстегнеев, гендиректор компании «Термочерепица», которая делает кровельные материалы из переработанного полиэтилентерефталата (ПЭТ, один из самых популярных бытовых полимеров, из которого делают, например, бутылки). — За счет простоты сортировки ПЭТ-отходов от прочих полимерных отходов (плотность ПЭТ такова, что он будет плавать на поверхности воды), а также низкого числа циклов их переработки вторичный ПЭТ сохраняет высокое качество».
Другой давно освоенный метод — пиролиз, цепочка химических реакций полного разложения полимеров, которая протекает при высоких температурах (около 650°С) без доступа кислорода. В результате пиролиза получаются синтетические углеводороды, которые после дополнительной очистки могут использоваться в качестве топлива в двигателях внутреннего сгорания.
Использование сортированного переработанного пластика фактически не отличается от работы с обычным сырьем. За счет простоты сортировки ПЭТ-отходов от прочих полимерных отходов (плотность ПЭТ такова, что он будет плавать на поверхности воды), а также низкого числа циклов их переработки вторичный ПЭТ сохраняет высокое качество
«10–30% пластиковых отходов технически невозможно или экономически нецелесообразно переработать во вторсырье. Тем не менее такой пластик можно использовать для получения энергии, например при помощи нашего решения», — говорит Генри Киннунен, генеральный директор Woima Finland Oy solutions (Финляндия). Сжигая пластиковые отходы в специальной камере, а затем прогоняя продукты реакции через сеть камер энергоблока, станции компании получают как тепловую, так и электрическую энергию.
По оценке Transparency Market Research, объем мирового рынка переработки пластика, который в 2017 году составлял $34,8 млрд, в ближайшие восемь лет будет расти на 6,8% в год. Однако затраты на сбор и отделение пластика от остального бытового мусора составляют в среднем около двух третей общей себестоимости переработки полимеров. Таким образом, центральной проблемой в борьбе с пластиком является не переработка как таковая, а именно его сбор.
«Мусор включает в себя объекты самых разных размеров, цветов, форм, которые приходят на предприятие сломанными, грязными, раздавленными, перепутавшимися между собой, — говорит Белен Гарника, сооснователь и коммерческий директор Sadako Technologies. — Как следствие, автоматическая сортировка мусора была невозможной до недавних пор, когда развитие искусственного интеллекта и робототехники привело к настоящей революции».
Роботы-сортировщики способны отличать пластик от прочих типов отходов с помощью нейросетей, которые анализируют форму и степень прозрачности предметов: например, имея в своей базе данные о нескольких типах пластиковых стаканчиков, сопоставляют их образ с тем, что движется по конвейеру, и выхватывают манипулятором все, что соответствует этому образу. При этом нейросеть учится определять стаканчики, даже если они смяты или разорваны; база пластиковых предметов постоянно пополняется.
Снизив стоимость сбора пластиковых отходов, владельцы роботов-мусорщиков смогут зарабатывать на сборе и поставках отходов на перерабатывающие заводы. Развитие робототехники, скорее всего, приведет к настоящей охоте за пластиком.
Робот-акула для ловли океанского пластика WasteShark
Год создания: 2016
Разработчик: RanMarine (Нидерланды)
Автоматический плавательный аппарат WasteShark может курсировать по заданной акватории, собирая в свой «желудок»-контейнер, в который помещается до 60 кг отходов, весь крупный (размером как минимум со стаканчик) мусор, который встретится на его пути. Когда свободного места в его «животе» не остается, робот-акула возвращается на берег, обслуживающие его специалисты очищают контейнер, и «акула» снова отправляется в путешествие. « Заряда батареи хватает на восемь часов плавания, — говорит директор RanMarine Оливер Каннингем. — Испытывая нашу «акулу» в заливе близ голландского города Дордрехта, мы вычислили, что в среднем робот собирает за минуту около 1 кг мусора. Это означает, что за стандартный восьмичасовой рабочий день он может собрать 480 кг мусора». Работая на полной мощности, робот будет избавлять водоемы планеты от 125 т отходов за год, утверждает Каннингем.
Услугами робота (всего их выпущено около сотни) пользуются в основном муниципалитеты городов (не только в Европе, но и, например, в ЮАР), которые хотят очистить прибрежные воды от тонн находящегося в них мусора.
Впрочем, для ликвидации мусорных «островов» в океане — таких, как Great Pacific Garbage Patch, расположенный между Гавайями и побережьем Калифорнии и, по оценкам экологов, состоящий из 1,8 трлн предметов из пластика, мощности «акул» может оказаться недостаточно. Избавиться от этого «острова», растянувшегося на 160 млн га (две территории Франции), предполагает американский некоммерческий фонд Ocean Cleanup, использующий для вывоза пластика рыболовецкие суда со специальными сетями.
Разработчик WasteShark подчеркивает, что использование их робота приведет к оздоровлению Мирового океана. « В открытом океане мусора станет меньше, а ведь там его собирать гораздо труднее, чем в прибрежной зоне, — отмечает Каннингем. — Отходы человеческой деятельности будут приносить меньше вреда морским животным, и биоразнообразие океана, которое сокращается уже несколько десятилетий, станет улучшаться». Минусом проекта является то, что пока «акула» не сортирует, а лишь собирает мусор — набивает брюхо всем, что плавает на поверхности, в том числе, например, и кусками дерева.
«В течение десяти лет WasteShark или какие-то новые конкурирующие проекты станут доминировать в сфере очистки водоемов», — уверен Каннингем.
Промышленный робот-сортировщик Max-AI
Год создания: 2015
Разработчик: Sadako Technologies (Испания) и Bulk Handling Systems (США)
Робот Max-AI, оснащенный рукой-манипулятором, способен сортировать мусор прямо на заводском конвейере. Компьютер анализирует двигающийся по конвейеру мусор и с помощью нескольких камер и алгоритмов машинного зрения выделяет в потоке отдельные предметы и отсортировывает те из них, которые сделаны из пластика (при этом робот способен отправлять в разные контейнеры вещи, сделанные из разных видов пластмассы). Рука, закрепленная над конвейером, тратит на каждый предмет не более секунды. Робот уже используется на нескольких предприятиях по сортировке мусора — в частности, на заводе Athens Waste Management в Лос-Анджелесе. « Выгоды от искусственного интеллекта, дополненного компьютерным зрением и продвинутым робототехническим решением, очевидны — это и экономия на затратах, и расширенные возможности, которые позволяют перерабатывающим заводам запускаться, не боясь скорого банкротства», — говорит Белен Гарника, сооснователь и коммерческий директор Sadako Technologies. Обладатель нескольких престижных наград от ведомств Евросоюза, стартап работает над обучением своего робота — его создатели надеются, что со временем Sadako научится распознавать любые типы мусора. « В будущем предприятия по переработке отходов будут полностью автоматизированы — на них не будет ни единого сотрудника, которому нужно перебирать мусор вручную. Такие заводы будут отправлять во вторсырье практически все материалы, которые поддаются переработке», — уверена Гарника.
«Умная» мусорная корзина TrashBot
Разработчик: CleanRobotics (США)
Первый в мире интеллектуальный мусорный бак был разработан стартапом из Питтсбурга. « Наш продукт предназначен для мест с высокой проходимостью — аэропорты, конференц-центры, офисные здания, спортивные арены, университеты», — говорит сооснователь CleanRobotics Чарльз Айхэп. Снаружи он выглядит как обычный металлический контейнер для мусора, разве что с небольшим экраном. Человек бросает мусор в отверстие, после чего робот взвешивает каждый предмет, если нужно, очищает его от жидкости, анализирует с помощью видеокамеры и ряда датчиков, а затем принимает решение: отправить его в отделение для отходов, подлежащих захоронению, или в отделение для материалов, которые можно переработать. В основе работы TrashBot лежит использование компьютерного зрения и машинного обучения. На то чтобы понять, в какой из контейнеров отправить каждый предмет, TrashBot тратит в среднем три секунды. Точность сортировки составляет около 90%, причем «умная» корзина постоянно учится распознавать новые типы мусора.
Монитор может показывать, какая доля выброшенных материалов попала во вторсырье. « Экран можно использовать для показа рекламы, связанной с конкретным типом мусора, который человек туда бросил», — говорит Айхэп. По его мнению, в ближайшие годы развитие технологий компьютерного зрения и машинного обучения позволит усовершенствовать процесс сортировки мусора: станет возможным его «аккуратное разделение на категории исходя из материала, нанесенных логотипов, уровня загрязнения и других факторов».
Сила толпы
Идея просить помощи публики для решения больших задач – отнюдь не новая. В 1715-м математик и астроном Эдмунд Галлей (в честь которого названа комета Галлея) опубликовал карту, предсказывающую время и путь будущих солнечных затмений. Поскольку Галлей мог находиться только в одном физическом месте во время затмения, он издал «просьбу к любопытным» и попросил, чтобы они запечатлели свою локацию и то, как выглядело небо во время затмения, попросив особенно отметить «продолжительность полной темноты». Этот первый краудсорсинг был успешен, и, собрав у публики информацию, Галлей создал вторую, еще более точную карту, которая помогла предсказать затмение в 1724 году.

Карта затмения Галлея
Сегодня технологии позволяют добавить к методам Галлея настоящую интерактивность. Народ можно вовлекать не только в процессы сбора и передачи информации. Люди могут выполнять более интересную и разнообразную работу, таким образом получая от процесса что-то себе взамен. В 1991-м, спустя почти 300 лет после инициативы Галлея, Лорен Карпентер, сооснователь студии Pixar, устроил запоминающуюся демо-трансляцию на одной из конференций по компьютерной графике. Он впервые показал участникам силу толпы, и продемонстрировал, что каждый член аудитории может быть использован в виде отдельного узла для решения проблемы.
«Проблемой» было заставить 5000 участников конференции играть в одну гигантскую игру в пинг-понг. Каждому присутствующему выдавалась ракетка, с одной зеленой и одной красной стороной. В центре комнаты был поставлен большой, как в кинотеатре, экран, который показывал классическую видеоигру, и компьютер, сканировавший аудиторию, и выяснявший, какую сторону ракетки они держат кверху – красную или зеленую. Каждая ракетка, которую держит член аудитории, считалась за один голос (шаг вверх или шаг вниз), и виртуальное отбивание мячика на экране проходило по законом такой демократии. Проапгрейженую версию этого эксперимента в 2013-м также провела BBC. Движение шарика (или, в этом случае, акулы) довольно медленное, и наблюдать не сильно интересно, но находиться в аудитории, и пытаться работать как единое целое для достижения общей задачи – вполне.
Эксперимент Лорена Карпентера на SIGGRAPH-91
Интернет берет такую работу с толпой, и выводит её на новый уровень. Теперь можно подключать к задаче не пару сотен людей, как Галлей, и не 5000 людей, как Карпентер, а любое количество, хоть миллионы. Такое массовое сотрудничество привело к появлению «Википедии», «Линукса», даже гигантского гиперлинкинга PageRank, который привел к появлению Google. Очищение рек с помощью силы толпы тоже должно стать чем-то вполне достижимым. И это далеко не единственная задача, которую можно решить таким способом.
Постройка Трэшбота
Идея разработки управляемых мусоросборников для очищения городских рек появилась два года назад. В июне 2017-го Urban Rivers успешно создала “плавающие сады” на той же реке Чикаго, чтобы помочь животным вернуться в свою естественную среду обитания. К сожалению, команда поняла, что эти сады быстро засоряются мусором. Чтобы решить проблему, они стали приглашать волонтеров, которые по старинке отправлялись к реке по утрам и вручную собирали более-менее крупный сор. Эффективность оказалась очень низкой, в основном из-за беспорядочного течения реки.

Иногда люди отправлялись утром к берегу, а там не было мусора для сбора. Потом что-то в течении менялось, и скоро это место заполнялось мусором. Мы поняли, что здесь нужно решение, которое будет включено постоянно. Чтобы мусор убирался в режиме реального времени, по мере того, как он плывет по течению.
Появились зачатки идеи, но команда не знала, как сделать так, чтобы робот находил и собирал загрязнения. Компьютерное зрение и технологии распознавания изображений хорошо продвинулись за последние годы, но научить бота определять, что подходит под понятие «мусор», всё равно оказалось непросто. « Мусор» – довольно абстрактный концепт. Оказалось, что хорошо отделять его от естественных объектов в реке пока что могут только люди. Так и сформировалась идея создания дистанционно управляемой «румбы», которую могли бы пилотировать пользователи со всего мира.

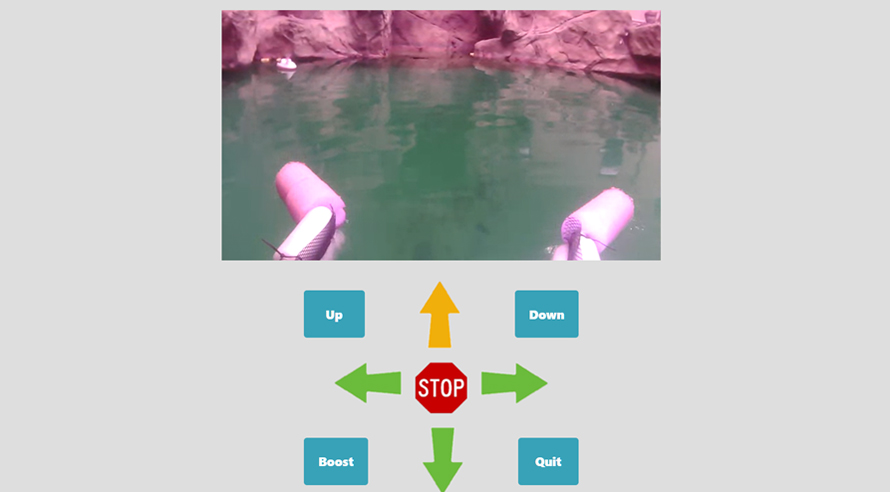
Запуск первого Трэшбота намечен на конец этого месяца, а стабильно работать он начнет в июне. Тогда же можно будет попробовать лично его пилотировать. А пока что самые нетерпеливые пользователи могут поупражняться в онлайн-демо в тестовом бассейне (или, как его тут помпезно называют, «подземной аква-лаборатории»), заполненном пластмассовыми уточками, которых нужно собрать. Каждому дается по пять минут. И это, кстати, действительно довольно весело.
Даже из России робот отзывается довольно быстро, управляется легко, правда, несобранных уточек не было обнаружено (из-за хабраэффекта ждать своей очереди к роботу, возможно, придется чуть дольше).
Триумф общин?
Краудсорс – не панацея, конечно. Он не всегда будет ответом на глобальные проблемы. Решение не всегда может быть децентрализировано и превращено в игру для публики, как поднятие мусора с роботом или открытие новых планет. В книге Евгения Морозова «Чтобы спасти всё, кликните здесь», критикуется растущая у людей вера в то, что любая ситуация может быть решена каким-то одним фиксом.

Но, как подтверждает Трэшбот и десятки проектов на Zooniverse, даже самые масштабные проблемы могут так, по крайней мере, быть сильно упрощены. Особенно если они следуют одной формуле: большая, централизованная задача, которая может быть разделена на маленькие-маленькие кусочки. А вообще идеально, если каждый из таких кусочков представляет собой какую-то маленькую завершенную работу, которую можно прочувствовать. Вроде поднятия одного пластикового пакета из речки, добавления отдельной правки в «Википедию» или проверки изображения на наличие в нём планеты или галактики.
Их действия должны быть реальными и значимыми. Вы не можете просто дать людям заполнять формы. Они должны чувствовать себя частью важного процесса. Если вы сможете этого достичь, вы увидите, что многие люди готовы прилагать очень большие усилия.
Появление и развитие новых технологий, вроде VR и дронов, открывает новые перспективы, так что этот довольно необычный раздел краудсорсинга в ближайшем будущем может стать еще интереснее. Обычные пользователи могут помогать не только в заполнении карт, пилотировании роботов или нахождении нужных объектов на изображениях. Например, по интернету теоретически уже возможно ощущать (и, соответственно, классифицировать) звуки, вкусы, запахи и текстуры.

Такие общие краудсорс-проекты, как Zooniverse и Трэшбот, вовлекают обычных пользователей в важные процессы – даже если они происходят за тысячи километров от них. И это однозначно лучше тренда на «кликтивизм» (как активизм, но только в виде кликов) – когда люди считают, что сделали очень полезную вещь, просто потому, что они лайкнули нужную страничку или пост на «Фейсбуке». Как и кликтивизм, инициативы вроде Gravity Spy или Planet Hunters позволяют вам участвовать в процессе, оставаясь в халатике и не покидая комфорта собственного кресла. Но здесь есть реальная и мгновенная польза, плюс вы все-таки прикладываете хоть немного усилий.
Ник Уэсли, один из создателей Трэшбота в Urban Rivers, объясняет:
Я думаю, эти новые технологии удаленного присутствия и вовлеченности – чрезвычайно полезный инструмент, позволяющий людям получить опыт в чем-то, чего, возможно, нет в месте их проживания. Когда вы находите что-то или исследуете что-то самостоятельно, вы начинаете интересоваться этим намного сильнее. Я думаю, что это действительно круто. Есть много разных сфер, которые могут использовать этот подход для решения действительно больших глобальных проблем. Особенно если удастся геймифицировать этот процесс и сделать его действительно интерактивным.
P. S. Покупать в США выгодно с Pochtoy.com. Доставка с нами – от $11.99 за полкило. Кстати, до 26 мая товары с Amazon выкупаем бесплатно.
Роботы сделают мир чистым
Время на прочтение
Исторически применение роботов началось с производства. Сначала были созданы роботы для выполнения отдельных операций, потом роботизированные производственные участки и, наконец, гибкие производственные системы. Опыт их эксплуатации позволяет сделать вывод, что уже в ближайшем будущем объем выпускаемой продукции может быть увеличен в несколько раз без повышения затрат человеческого труда. Но это несомненное достижение научно-технического прогресса порождает не только надежды на долгожданное изобилие, исчезновение нищеты и т. п., но и определенные опасения.
К счастью, роботы не термоядерные бомбы и выход из противоречия между возможностями и последствиями есть. Этим выходом являются сами роботы, приспособленные для утилизации отходов производства и потребления. Согласно старинному принципу, подобное лечится подобным. Если мы увеличим производство в два раза и при этом создадим такие робототехнические системы, которые будут утилизировать и превращать во вторичное сырье или энергию 50 % отходов, то нагрузка на окружающую среду не изменится. Если уровень утилизации достигнет 67 %, то производство можно увеличить в три раза. И так далее.
Естественно, это крайне грубая схема. На практике необходимо учитывать конкретные способы и объемы утилизации, затраты на производство дополнительного оборудования и много других факторов. Но очевидно, что увеличение потребления теснейшим образом связано со степенью переработки отходов. А поскольку общество с высоким уровнем потребления не слишком-то готово заниматься грязным ручным трудом, то роботам придется потрудиться. И они уже приступили к работе.
Задача утилизации отходов может быть разбита на три подзадачи:
Начнем с первой. Сейчас никого не удивишь роботом-пылесосом или роботом для мытья окон. А ведь это и есть простейшие роботы для сбора отходов. Но, конечно, их возможности крайне ограничены, да и соответствующие отходы — в основном бытовая и уличная пыль — не вызывают интереса с точки зрения дальнейшей утилизации.
А вот «бродячая» корзина для мусора уже гораздо эффективнее обычной. В лаборатории по разработке взаимодействий и коммуникаций японского технологического университета Тойохаши создан небольшой мусорный контейнер на колесной базе. Он получил название Social Trash Box (STB). Робот оснащен микропроцессором, видеокамерой и динамиком, а также датчиками инфракрасного излучения и датчиком расстояния.
Робот начинает свою кипучую деятельность с определения места, где в данный момент присутствуют люди. Это происходит с помощью инфракрасного датчика, реагирующего на тепло их тел. За безопасность перемещения робота среди людей отвечает датчик расстояния. Для поиска собственно мусора STB использует встроенную камеру в сочетании с алгоритмом распознавания объектов.
Когда робот находит мусор, он начинает выполнять активные «телодвижения» и издавать звуковые сигналы. Тем самым он «просит» людей поднять мусор и бросить в контейнер.
Инфракрасные датчики, расположенные в верхней части ведра, дадут знать, действительно ли мусор попал туда, куда надо. Робот даже может немного наклонить ведро в любую сторону, чтобы облегчить человеку выполнение его задачи. В общем, перед нами активное человеко-машинное сотрудничество в деле сохранения окружающей среды. Причем робот не только выступает в качестве сборщика мусора, но и служит будильником совести любителей намусорить где попало.
Но как море не вычерпаешь ложкой, так и весь мусор не соберешь в маленькие корзины. Для этого нужны более мощные агрегаты. Например такие, какие разработаны и испытаны в рамках проекта DustBot (www.dustbot.org) для отработки технологий робототехнической уборки и вывоза мусора в масштабах небольшого города. В нем задействованы многие специалисты из Италии, Испании, Британии, Швейцарии и Швеции, однако ведущая роль принадлежит исследователям из Высшей школы святой Анны (Scuola Superiore Sant’Anna), расположенной в Пизе. Финансовую поддержку проекту оказывает Европейская комиссия (European Commission).
Первый робот, названный DustClean, представляет собой автономную уборочную машину, оборудованную вращающимися щётками и пылесосом. DustClean чистит улицы, объезжая город по заданному маршруту, при этом останавливаясь перед пешеходами и минуя препятствия.
Второй робот, получивший имя DustCart, можно назвать мусорщиком. Он собирает мусорные мешки городских жителей и отвозит их на переработку. Высота робота 150 см, вес 70 кг, скорость 1 м/с. Одного заряда батарей хватает на 16 км пути.
Для того чтобы робот-мусоровоз прибыл к месту назначения, его нужно будет вызвать по телефону. После прибытия робота клиент вводит свой персональный код через экран на корпусе DustCart. Это необходимо, так как в дальнейшем подобные системы предполагается сделать платными. При этом человек может выбирать разные маршруты дальнейшей транспортировки мусора, а также тип мусора (органические отходы, стекло, пластик или бумага). После проделанных манипуляций клиент помещает мешок мусора в открывающийся люк робота, и он отправляется к пункту сбора отходов, где и выгружает мешок.
Роботы из проекта DustBot не могут полностью решить проблему сбора мусора. Их назначение скромнее — работы в таких местах, где обычной уборочной технике не поместиться. А таких мест в европейских городах очень много. Дополнительно роботы оснащены сенсорами, определяющими содержание в воздухе бензола, оксидов азота, углерода и серы, и датчиками температуры.
Полевые испытания DastBust-ов проходили в итальянском городке Печчоли. Коммуна Печчоли — первый в мире населенный пункт, в котором на дорогах была выделена отдельная полоса для движения роботов.
Следующим по масштабной шкале после DustBot будет робот ROARY, продемонстрированный компанией Volvo. Разработка велась совместно со специалистами Chalmers University of Technology, Malardalen University и University of Pennsylvania. Проект демонстрирует возможности совместной работы двух роботов, которые в перспективе помогут облегчить ежедневный труд городских рабочих.
ROARY транспортируется на специальной площадке, закрепленной на задней части мусоровоза. Сам мусоровоз на фотографии едва виден справа, поэтому может создаться ложное впечатление, что ROARY полностью автономен. В действительности его автономность существенно ниже, чем у DustBot-ов.
По прибытии оператор активирует беспилотный летательный аппарат, установленный на крыше автомобиля, после чего дрон сканирует окрестности для обнаружения мусорных контейнеров. Система передает данные о расположении баков роботу, который грузит мусорный контейнер на специальную платформу, возвращается к мусоровозу и поднимает бак, очищая его от мусора. В общем, ROARY приспособлен для самой тяжелой и грязной части работы мусорщика.
Для ориентации на местности ROARY использует GPS и лидар, которые позволяют ему избегать столкновения с препятствиями. С помощью встроенной камеры ROARY может обнаружить объект, находящийся в опасной близости от мусоровоза во время опорожнения контейнера, а автоматизированная функция аварийной остановки предупредит возможные неприятные последствия. Аварийным отключением может воспользоваться и оператор мусоровоза.
В общем, судя по трем рассмотренным системам, роботы вполне способны справиться со сбором мусора. Особенно если им в этом немного помогут люди. Это только справедливо — каждый должен убирать за собой. Но вот убирать за другими, а тем более разгребать накопленные ими за годы отходы, никто против своего желания не обязан. Поэтому придется снова обратиться к роботам. А если более конкретно, то к разработанной финской компанией ZenRobotics системе ZenRobotics Recycler (ZRR).
В настоящее время классическая методология предварительной сортировки мусора осуществляется в несколько этапов:
На третьем этапе у конвейера находятся люди, которые при помощи определенного инструктажа и полученных навыков сортируют мусор. После чего разложенные по разным контейнерам отходы направляются на специальные заводы для переработки во вторсырье или биотопливо. Компания ZenRobotics решила избавить людей от грязной и монотонной работы, создав специальную роботизированную технологию, которая способна объединить все три этапа в один.
Правда, пока что речь идет, в основном, о строителных отходах, а точнее о горах мусора, остающихся после сноса старых зданий. Z RR состоит из 3 основных частей. Во-первых, это манипуляторы, которые представляют собой стандартные индустриальные роботы. Во-вторых, это датчики для распознавания фрагментов мусора — видеокамеры различных типов и металлоискатели. Датчики устанавливаются неподвижно. В-третьих, компьютеры в индустриальном исполнении. Основой «интеллекта» ZRR является программное обеспечение, регулярно обновляемое фирмой через Internet.
Устройство ZRR наглядно представлено на рисунке, изображающем действующий прототип полноценной промышленной системы. Строительный мусор с помощью конвейера подается под блок сенсоров. Сенсоры распознают каждый фрагмент мусора и передают в систему управления манипуляторами информацию о его расположении на конвейере, размере и материале — кирпич, дерево, арматура и т. п.
Когда фрагмент достигает зоны действия манипулятора, тому остается только переместиться в уже рассчитанное положение, раскрыть схват с учетом размера фрагмента, снять фрагмент с конвейера и бросить в контейнер с соответствующей фракцией.
Не исключено, что некоторые фрагменты мусора не будут достоверно опознаны сенсорами. В этом случае манипуляторы не станут их сортировать наугад. Нераспознанные фрагменты будут доставлены конвейером в специальный сборник, откуда их снова подадут в начало конвейера, под сенсоры. Скорее всего, при другом расположении на ленте и относительно друг друга эти фрагменты удастся правильно распознать. Процесс будет продолжаться, пока вся партия мусора не окажется разложена по фракциям.
Коммерческая система ZRR уровня больше прототипа, включает минимум два манипулятора и объемистые контейнеры.
На основе ZRR могут быть построены многоступенчатые системы сортировки. Отдельные установки в такой системе работают последовательно — если какой-нибудь фрагмент мусора будет пропущен первой установкой, то вторая с высокой долей вероятности с ним справится.
Программное обеспечение ZRR может принимать самостоятельные решения и самообучаться. Поэтому вмешательство человека в работу системы минимально и требуется только при отказах.
Справедливости ради следует отметить, что ZRR не является единственным возможным решением для сортировки мусора без участия (или с минимальным участием) человека. Так, немецкой компанией GUNTHER ENVIROTECH разработана специальная сортировочная установка SPLITTER для сортировки твердых бытовых отходов. Эта установка не использует сенсоры, манипуляторы и сложное программное обеспечение. Всех их заменяют шнеки и валы специальной формы, позволяющие разделить мусор по форме, размеру и весу на 3 фракции.
Несмотря на простоту и оригинальность конструкции, очевидно, что SPLITTER способна осуществлять только грубое первичное разделение мусора на фракции. При необходимости дальнейшей сортировки необходима система типа ZRR. Таким образом, эти технологии не столько конкурируют, сколько дополняют друг друга при решении поставленной нами в начале статьи задачи — утилизации отходов не менее чем на 2/3 с использованием средств робототехники.
И тут выясняется, что, говоря об утилизации мусора на 2/3, мы существенно занижаем возможности располагаемых технологий. Потому что уже эксплуатируются системы, позволяющие поднять показатель утилизации до 97%!
В начале 90-х группа нидерландских ученых начала исследования и разработку новой технологии, основными задачами которой стала переработка отходов без предварительной сортировки, получение качественного (в т.ч. очищенного от ядовитых и вредных веществ) первоначального сырья, а так же приемлемость по затратам, прибыльность и, одновременно, экологическая безопасность.
Мусороперерабатывающий завод, построенный на основе принципов «3R», способен перерабатывать:
и многое другое.
В зависимости от задач, завод комплектуется из необходимых самостоятельных блоков.
На этапе проектирования, проводиться анализ отходов, предполагаемых к рециклингу в системе. Так, определяется качественный состав для расчета эффективности и окупаемости, которую сможет гарантировать производитель, а так же наличие опасных или радиоактивных веществ в их составе.
Ниже описан обобщенный процесс переработки мусора на «3R»-заводе.
Обратим внимание, что для получения энергии используется биогаз из блока ферментации. Таким образом, количество получаемой энергии не зависит напрямую от процентного содержания органики в поступившем на завод мусоре, а только от времени и интенсивности ферментации. Поэтому завод можно сделать не потребителем, а поставщиком энергии (в том числе и для самого себя) практически в любом случае.
Основываясь на подсчетах «EPC Group», при обработке 100 кг отходов, получается 97 кг готового сырья высокого качества (выход и качественный состав сырьевого материала зависит от типа отходов, поставляемых в систему), а окупаемость проекта достигнет 30–50 % в год.
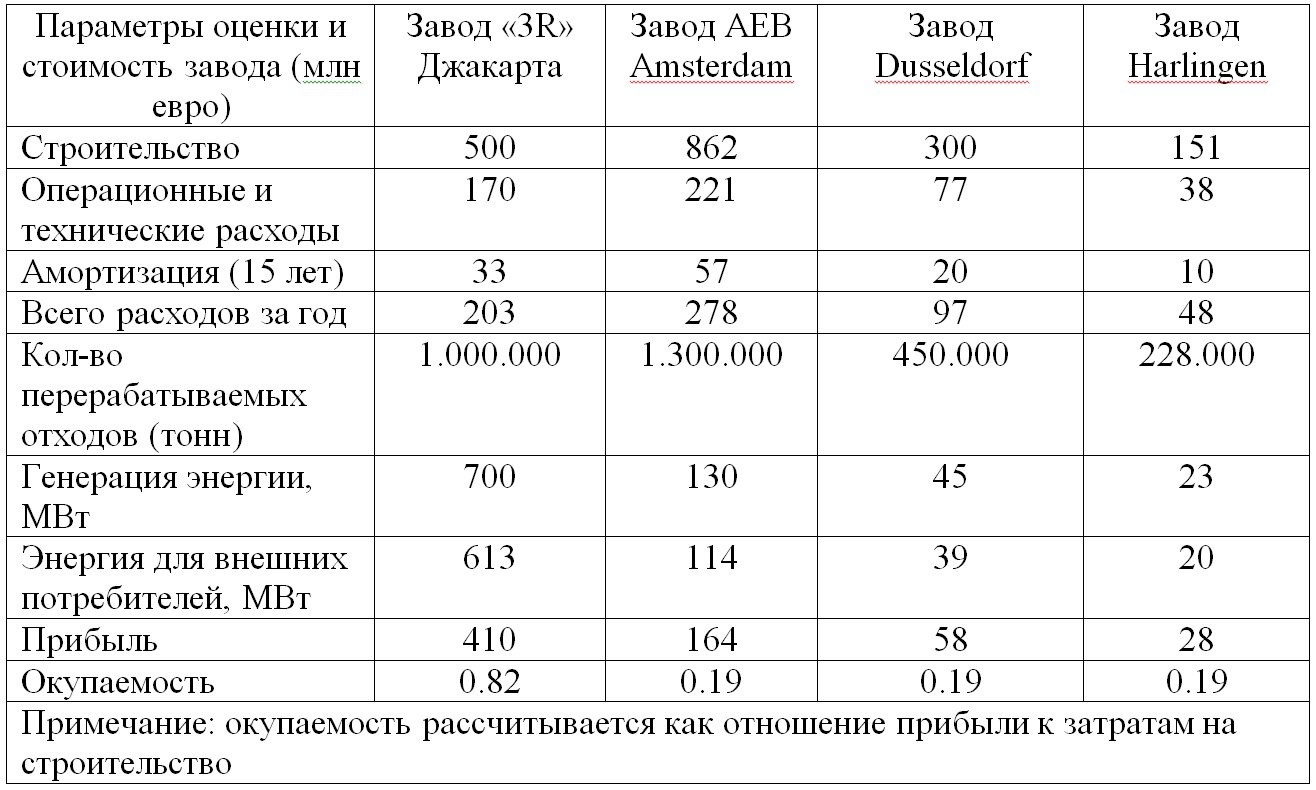
Как видно из таблицы, все заводы «3R» технологии не только перерабатывают мусор, но и являются источниками энергии для внешних потребителей.
Если суммировать сказанное выше, то очевидно, что процессы сбора, сортировки и переработки мусора могут быть практически полностью автоматизированы, причем на основе уже имеющихся технологий. Более того, автоматическая утилизации отходов способна принести немалую прибыль. От человека, по сути, потребуется только помогать роботам в их новом благородном занятии и, все-таки, не бросать обертки от мороженого мимо спешащего за ними робота-контейнера. А то нехорошо как-то получится.
Спасение с Zooniverse
Крис Линтотт – профессор астрофизики в Университете Оксфорда. Двенадцать лет назад он работал над проектом, для которого ему нужно было анализировать форму галактик. Но, даже если взять небольшой участок космоса, галактик там слишком много – многие миллионы. Оказалось, что, как и в случае с определением мусора на реке Чикаго, человеческий глаз с классификацией типа галактики пока справляется лучше машины. После классификации 50 000 галактик, Линтотт с командой решили, что им нужна помощь.
Мы создали вебсайт, Galaxy Zoo, и попросили публику – простых пользователей – помочь нам с определением типа галактик. Вам не нужно было знать, что такое галактика, или иметь интерес к астрономии. Вы просто видели, что перед вами на изображении, и выбирали, на что это больше похоже. Люди проявили к сайту большой интерес, мы получили сотни миллионов классификаций.
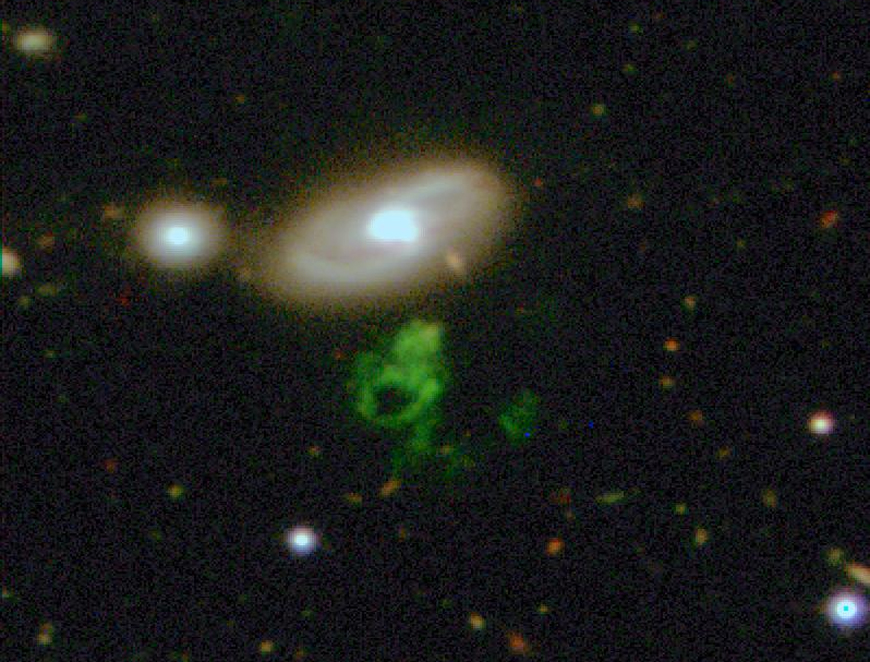
В результате каждый получил шанс стать частью передовых космических открытий. Одна учительница из Дании, Ханни ван Аркел, даже открыла непонятный объект – ей на сайте выдало нечто, похожее на зеленую фигурку, она проконсультировалась на форуме, не является ли это ошибкой, энтузиасты проверили этот участок космоса, и там действительно показалось что-то странное. Теперь этот объект (скорее всего, скопление газа, подсвеченное квазаром) в честь учительницы называют “Объектом Ханни”.
Ну а для Криса Линтотта главным было то, что проект оказался невероятно успешным:
С нами стали связываться другие исследователи, которые просто не могли справиться с объемами своих данных. От астрономии до биомедицины и социологии, всем нужно было их как-то обрабатывать.
Так Линтотт создал что-то вроде «Кикстартера» для исследований – платформу Zooniverse, где ученые могут краудсорсить проекты, запрашивая помощь у публики. На ней работает около сотни проектов, просто слишком больших для ограниченного количества ученых.
Один из таких проектов, Gravity Spy, помогает астрофизикам определять гравитационные волны и отделять их от ошибок в данных, собранных лазерными интерферометрами. Обычные пользователи на данный момент провели более 1,2 млн классификаций. Другой проект, Wild Gabon, оценивает популяцию млекопитающих в африканской саванне. А Planet Hunters приглашает народ к открытию новых планет, используя данные со спутников NASA. Пока что их так открыто около сотни (из 300 тысяч проверенных снимков).
Крис Линтотт, основатель Zooniverse, говорит:
Мне даже сложно представить, что 20 лет назад никто не открыл ни одной планеты вокруг других звезд. Сейчас это можно сделать просто со своим веб-браузером.
Когда ураган Ирма прошелся по карибским островам в 2017-м, организация Planetary Response Network использовала Zooniverse для создания самых точных карт местности. Почти шесть тысяч волонтеров прошлись через 300 тысяч изображений, чтобы определить, какие дороги затоплены, какие перекрыты, а по каким еще можно передвигаться. Там же отмечались группы беженцев, нуждающиеся в немедленной помощи. Получился большой и незаменимый инструмент для гуманитарных работников, прибывающих в регион.
Сила толпы. Как в Чикаго разработали мусороедного робота – очистителя рек

Если вы пройдетесь по берегу реки Чикаго этим летом, вы увидите что-то довольно необычное. Среди уток, лебедей, рыбок, редких бобров и выдр время от времени будет проплывать небольшой робот. Похожий на маленький плот, он будет лениво ходить вниз и вверх по реке, собирая всё, что окажется на её поверхности. Это Трэшбот – детище чикагского стартапа Urban Rivers, собравшего экологов, робототехников и других профессионалов с целью очистки городских рек от мусора и помощи их обитателям.
С виду Трэшбот может показаться «водной румбой», автономно (или случайно) выбирающей путь, пока впереди еще есть загрязнение. Он же двигается сам по себе, прям как румба! Но на самом деле всё наоборот. Робот не выбирает себе направление сам, в любой момент его может контролировать один из примерно 4 383 810 342 людей – глобальных интернет-пользователей.

Ник Уэсли, один из руководителей проекта, рассказывает:
Мы наконец на этапе, когда большинство людей живут в местах с достойным интернет-соединением. Технология, требуемая для постройки нашего робота, не сложнее, чем технология в недорогом дроне. Можно стримить видео с довольно маленькой задержкой, и на таких скоростях им можно управлять. Польза для природы, интересно на пару минут, дает ощущение, что сегодня ты сделал что-то полезное, что еще надо.