

- Что внутри
- Что почитать, где посмотреть, как приобщиться
- Начинаем дрифт
- Esc регулятор
- Амперы и вольтаж
- Внешний вид
- Другие важные факторы, которые следует учесть
- Избыточная поворачиваемость (oversteer)
- Инструкция по сборке шасси радиоуправляемой машинки на 3d принтере
- Количество витков, количество полей, тип обмотки, сопротивление, температура
- Круг сил (circle of forces)
- Магазины, где покупать
- Недостаточная поворачиваемость (understeer)
- Немного теории
- Перенос веса (weight transfer)
- Пит-стоп
- Поиск золотой середины (или сбалансированная автомодель)
- Прирост развала (camber intake)
- Сенсоры
- Схождение (toe-in) и расхождение (toe-out)
- Угол бокового увода (slip angle)
- Угол развала (camber)
- Центр крена (roll center)
- Шасси
- Электромотор
Что внутри
Сама машина выглядит достаточно просто, впрочем, нам на ней учиться ездить, а не любоваться красотами. Корпус – обычный литой «контур», который держится на четырёх «прищепках». Легко заменить в случае полного уничтоже, не жалко расквасить. Все повреждения лечатся степлером, строительным скотчем, мятным «Орбитом» и такой-то матерью.
Под корпусом – приводной мотор, батарейный блок, модуль радиопередачи, серво-машинка для управления передними колёсами. Всё это крепится на удачно скопированную раму модельки HSP Flying Fish, которая считается просто минимумом у RC-дрифтеров.
Разумеется, любители и профессионалы будут говорить, что у неё вялый коллекторный мотор, карданы вместо приводных ремней (хотя на тему того, что лучше, споры не затихают до сих пор), и в ней надо менять всё, от и до, но вы их не слушайте. «Нормальная» по их меркам модель стоит 20-30 килорублей, а нам и такая сойдёт, благо, главное здесь – понять основы и научиться ездить.
У модели достаточно много настроек, они хорошо описаны в прилагаемой инструкции. Регулируется нейтральное положение колёс (иногда требуется лёгкое смещение или коррекция нейтрального угла прямо на ходу, и аппаратура позволяет это сделать), несколько режимов работы акселератора, имитация перегазовки и блокировки задних колёс ручником…
В общем всё, что может потребоваться начинающему дрифтеру. Читайте инструкцию, господа. В ней много всего полезного.

Пульт же… весьма обычный для RC-моделей. Требует четыре АА-батареи, работает в диапазоне 2.4 ГГц, на вид и ощупь достаточно дёшев, но вполне приемлем к эксплуатации. За два месяца не сломался.
Что почитать, где посмотреть, как приобщиться
Советов в интернете миллион, набираете
в Google и понеслась; но большая часть из них расчитана на дорогие модели и какое-никакое участие в этой «тусовке» – коллективные заезды или, скажем, походы в дрифт-парк. И такие строят, и, между прочим, очень и очень красивые.
В РФ, насколько мне известно, фанатов не так много, чтобы кто-то целый трек создал, но один точно был в Минске.
Хобби достаточно дорогое, занимает много места, так что в условиях кризиса придётся выкручиваться самостоятельно. Ну а когда освоитесь в этом нелёгком деле — можно и модель собрать самостоятельно, с вниманием к деталям и мелочам, поставить дорогую электронику, прятать платёжки и накладные с Ebay от жены…
В общем, вам уже будет не спасти. А пока учитесь ездить боком, показывайте свои навыки друзьям и завлекайте их в RC-дифтклуб. До встречи!
Наши обзоры: » Подключаем оригинальные геймпады к ПК» Razer Abyssus: самый доступный Razer» Nikon 1 S2: однокнопочная беззеркалка» Обзор Lenovo Miix 3-1030» Разбираемся в арт-хаосе компании Wacom» ASUS ZenFone 5, LG L90, HTC Desire 601 — двухсимочная война за потребителя, часть 1» ASUS Transformer Pad» Гарнитуры Razer Kraken
Начинаем дрифт
Во-первых, стоит выбрать площадку для обучения. Нужна ровная поверхность, без грязи и мусора, более-менее гладкая. Подойдёт асфальт, ламинат, линолеум – что угодно, лишь бы максимально ровно и безо всяких препятсвий. Минимум места – 5х5 метров. В меньшем пространстве вы просто будете спотыкаться о стены и не сможете (или будете очень долго) учиться держать машину на дуге, никакого удовольствия от таких мыканий не будет. Вот пример подходящей площадки:
Во-вторых, стоит принести с собой конусы — вполне подойдут те, что используют любители роликовых коньков, ну или соответствующую конусам замену. Например, отлично подходит бутылка с водой: не сдувается ветром, не повреждает модель, хорошо видна.
В устойчивом заносе потребуется управлять машиной не только «рулём», но и «газом». Более того, скорее управление газом на поведение модельки в заносе влияет сильнее, чем точно выставленный угол колёс.
Отличные обучающие видео по основам дрифта есть в компьютерной игре NFS Shift 2 Unleashed, их записывал достаточно известный в дрифт-среде дядька по имени Вон Гиттин. С некоторыми поправками (на то, что у нас полноприводная моделька, а в Formula D участвуют только заднеприводные модели, плюс полноценного ручника у нас нет), их можно принять за прямое руководство к действию.
Начать стоит с плавного перехода от прямолинейного движения к нарезанию «пончиков» или «бубликов», называйте их как хотите. Как только научитесь держать машину в устойчивом круговом заносе, можно переходить к следующему упражнению – восьмёркам.
Для этого выполняем пончик, а в конце «перекладываем» машину на другой борт и повторяем пончик в обратном направлении. Фигуру стоит отточить до полного автоматизма, так как «перекладка» с одного борта на другой – вторая основа дрифта, как и удержание машины на произвольном радиусе в боковом заносе.
Третий приём, который требуется освоить – манжинг. Он совмещает в себе прямолинейное движение, полувосьмёрки и перестановки. Здесь мы учимся «вылавливать» машину из заноса, аккуратно перекладывать её на другой бок и двигаться одновременно боком и прямо по очень большой дуге.
С основами покончено. Нарисуйте себе мелом на асфальте более-менее вменяемый трек и тренируйтесь в прохождении: не заезжайте за края линии, держите машину в устойчевом заносе и работайте газом.
Esc регулятор
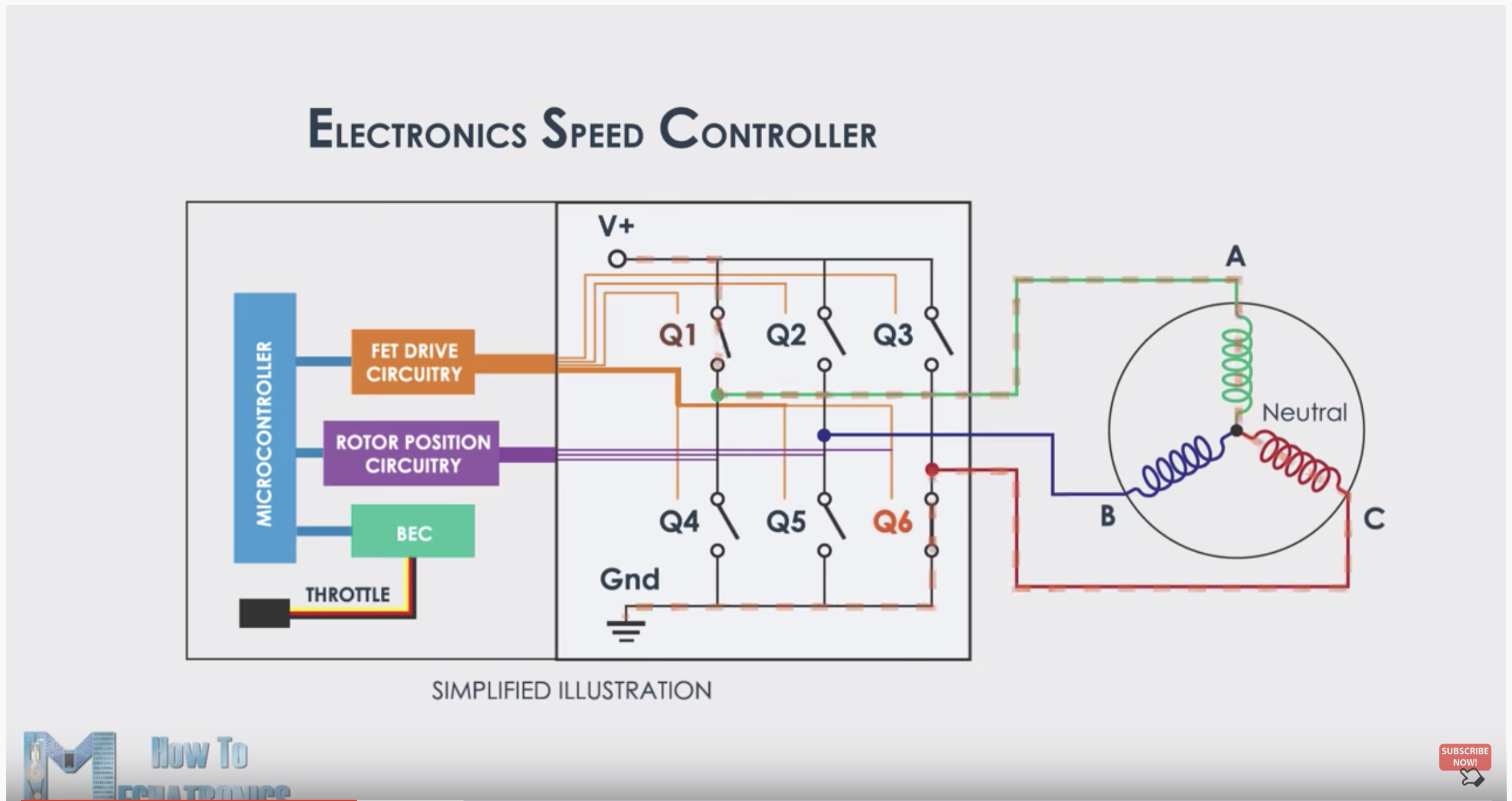
(схема работы ESC, и ветвления типа “звезда”, видео в полезных ссылках)
ESC — Electronic Speed Controller, электронный регулятор скорости. Подключается к радиоприемнику и управляет электромотором, а так же питает сервопривод (моторчик для лево/право).
(3 провода слева идут к мотору, красный с черным справа, подключается к аккумулятору)
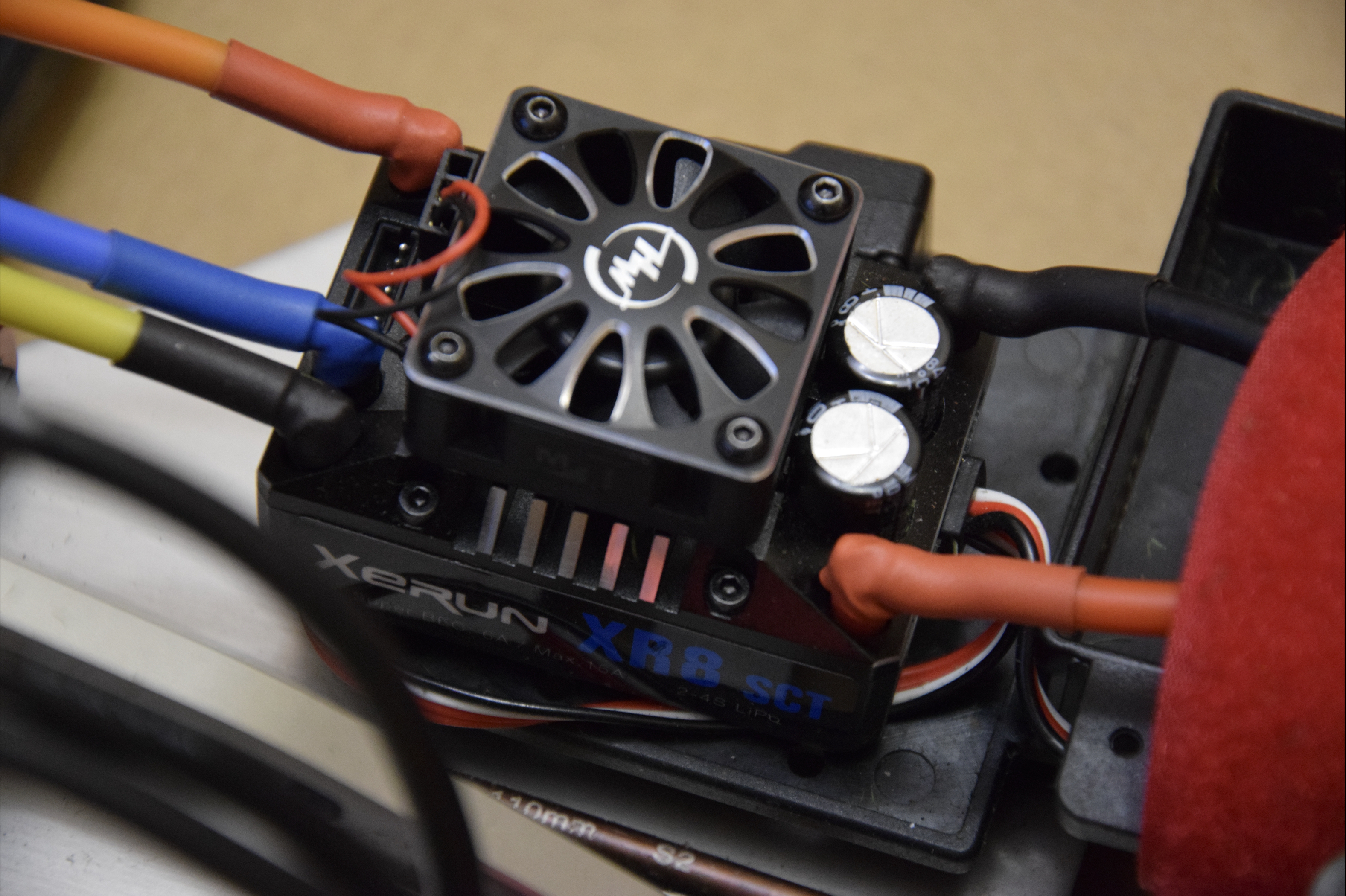
Выбирать регулятор стоит с небольшим запасом и с мыслью в голове, что его можно использовать не только для автомоделей, и не только с каким-то конкретным мотором. Желательно брать регулятор который умеет работать с сенсорными моторами, даже если вы не планируете покупать такой мотор. На вырост так сказать.Из основных деталей регулятора помимо главной схемы, можно выделить BEC и конденсаторы.
BEC используется для понижения вольтажа от аккумулятора для приемлемых сервоприводу и радиоприемнику. Ведь сервопривод и радиоприемник питаются именно от ESC. Если вы особый энтузиаст, то бывают люди которым не хватает встроенного и они паяют свой BEC.
Конденсаторы сглаживают скачки напряжения в цепи, они могут случаться как при старте так и при торможении/прекращении питания мотора за счет индукции самих проводов (да и такое бывает, сам в шоке, в полезных ссылках есть линк на форум). Как в случае с BEC, если вам не хватает встроенных конденсаторов, вы можете их допаять.
Для настройки регуляторов используются программные карты:
Как привило там можно настроить отсеку по вольтажу (если падает вольтаж, это значит, что ваш аккумулятор разряжается и это потенциально опасно, так как падает вольтаж, растут амперы, температура и вуаля). Так же там настраивается максимальная сила торможения, изначального импульса, вкл/выкл заднего хода и тд.
Не покупайте программные карты под ESC. Они наверняка будут у местных любителей или владельцев трасс
Амперы и вольтаж
Про вольтаж, мы уже знаем. 3S-4S нас не пугают.
Amps — в спецификации к моторам это третье по важности, на что следует обращать внимание.Cont Current: 80A — Сила тока в номинале, то есть хоть часами гоняйте при таком токе и все будет хорошо.
Max или Burst current: 120A — Максимальная сила тока, кратковременная. Например при старте или торможении.
Ответить на вопрос, сколько же тока будет ходить по системе без экспериментов невозможно. Рассчитывайте с запасом, но адекватным. Регулятор для мотора должен обладать теми же значениями, а лучше чуть побольше. Например для мотора с примера выше подойдут параметры — Cont 90A, Burst 140A.
Можно отталкиваться от мощности мотора, например:
Мощность мотора 1600W, используя аккумулятор 4S мы получим — 1600W / (4 * 3.7v) = 108A.
Про аккумуляторы будет отдельная статья, но забегая на перед, 3.7v это номинальный вольтаж (средний). Полностью заряженная банка дает 4.2v, поэтому сила тока будет еще меньше. Не забывайте, что это расчет на максимальных числах. В реальности у модели есть стадия разгона, торможения, инерции.
Если брать в расчет, что по цепи у моей модели ходит ток 108A, то коннекторы от аккумулятора к регулятору у меня должны были уже давно сгореть. Но все в порядке. Даже не хочу вас пугать и расписывать вам какие коннекторы сколько выдерживают. У меня мотор 1600W и t-plug в документации которых заявлено 45A, максимум 60A, после часа покатушек даже не греются.
(t-plug)
Внешний вид
- Качество исполнения Xiro Xplorer на высоком уровне, а его лётные характеристики удивят с первого взлёта. Разработчики постарались на славу, дрон был подвержен многократным испытаниям по таким параметрам как отказоустойчивость и надёжность.
- Период адаптации и обучения минимален, всё сведено к тому, чтобы потребитель не тратил время на изучение кнопок и отработку навыков управления. Такие функции как удержание позиции, автоматический взлёт и посадка, автоматический полёт по заданному маршруту, автовозврат домой с последующей посадкой, делают квад простым в эксплуатации для потребителя любого уровня.

Другие важные факторы, которые следует учесть
Любая автомодель может испытывать недостаточную или избыточную поворачиваемость в зависимости от дорожных условий, скорости, доступного сцепления и действий водителя. Конструкция автомодели, однако, имеет тенденцию к индивидуальному “предельному” условию, когда автомодель достигает и превосходит пределы сцепления.
“Предельная недостаточная поворачиваемость” относится к автомодели, которая благодаря конструктивным особенностям стремится к недостаточной поворачиваемости, когда угловые ускорения превосходят сцепление шин.Предельный баланс управляемости является функцией переднего/заднего относительного сопротивления крену (жесткость подвески), переднего/заднего распределения веса и переднего/заднего сцепления шин.
Автомодель с тяжелой передней частью и низким задним сопротивлением крену (из-за мягких пружин и/или малой жесткости, или отсутствия задних стабилизаторов поперечной устойчивости) будет обладать тенденцией к предельной недостаточной поворачиваемости: ее передние шины, будучи более тяжело нагружены даже в статическом состоянии, будут достигать пределов своего сцепления раньше, чем задние шины, и таким образом будут развивать большие углы бокового увода.
Автомодели с передним приводом также подвержены недостаточной поворачиваемости, так как они обычно не только обладают тяжелой передней частью, но и подача мощности на передние колеса также снижает их сцепление доступное для поворота. Это часто приводит к эффекту “дрожания” на передних колесах, так как сцепление неожиданно изменяется вследствие передачи мощности от двигателя на дорогу и управления.
Хотя недостаточная и избыточная поворачиваемости обе могут вызывать потерю контроля, многие производители разрабатывают свои автомодели для предельной недостаточной поворачиваемости в предположении, что для среднего водителя это легче контролировать, чем предельную избыточную поворачиваемость.
В отличие от предельной избыточной поворачиваемости, которая часто требует нескольких корректировок управления, недостаточная поворачиваемость часто может быть снижена с помощью понижения скорости.Недостаточная поворачиваемость может проявляться не только во время ускорения в повороте, она также может проявиться во время резкого торможения.
Если баланс тормозов (усилие торможения на передней и задней оси) слишком смещен вперед, это может вызвать недостаточную поворачиваемость. Это вызывается блокированием передних колес и потерей эффективного управления. Может иметь место и противоположный эффект, если баланс тормозов слишком смещен назад, то задний конец автомодели заносит.
Спортсмены, на асфальтовых поверхностях, в основном предпочитают нейтральный баланс (с небольшой тенденцией в сторону недостаточной или избыточной поворачиваемости, в зависимости от трассы и стиля вождения), так как недостаточная и избыточная поворачиваемость приводят к потерям скорости во время прохождения поворотов.
Избыточная поворачиваемость (oversteer)
Автомодель обладает избыточной поворачиваемостью, когда задние колеса не следуют позади передних колес, а вместо этого скользят в сторону внешней стороны поворота. Избыточная поворачиваемость может привести к заносу.На тенденцию автомодели к избыточной поворачиваемости влияет несколько факторов, таких как механическое сцепление, аэродинамика, подвеска и стиль вождения.
Предел избыточной поворачиваемости наступает, когда задние шины превышают предел своего бокового сцепления во время поворота перед тем, как это происходит с передними шинами, таким образом вызывая ситуацию, когда задняя часть автомодели направлена в сторону внешней стороны поворота.
В общем смысле избыточная поворачиваемость является условием, когда угол бокового увода задних шин превосходит угол бокового увода передних шин.Автомодели с задним приводом более подвержены избыточной поворачиваемости, в особенности при использовании газа в тесных поворотах.
Это происходит потому, что задние шины должны выдерживать боковые силы и тягу двигателя.Тенденция автомодели к избыточной поворачиваемости обычно увеличивается при смягчении передней подвески или ужесточении задней подвески (или при добавлении заднего стабилизатора поперечной устойчивости).
Как вы различаете избыточную и недостаточную поворачиваемость?Когда вы входите в поворот, избыточная поворачиваемость – это когда автомодель поворачивает круче, чем вы ожидаете, а недостаточная поворачиваемость – это когда автомодель поворачивает меньше, чем вы ожидаете.
Обладать избыточной или недостаточной поворачиваемость, вот в чем вопросКак упоминалось ранее, любые регулировки являются предметом компромисса. Автомодель обладает ограниченным сцеплением, которое может быть распределено между передними и задними колесами (это может быть расширено с помощью аэродинамики, но это уже другая история).
Все спортивные автомодели развивают более высокую боковую (т.е. боковое скольжение) скорость, чем это определяется направлением, в которое указывают колеса. Различие между кругом, по которому катятся колеса, и направлением, в которое они указывают, является углом бокового увода (slip angle).
Если углы бокового увода передних и задних колес являются одинаковыми, автомодель обладает нейтральным балансом управляемости. Если угол бокового увода передних колес превосходит угол бокового увода задних колес, говорят, что автомодель обладает недостаточной поворачиваемостью.
Если угол бокового увода задних колес превосходит угол бокового увода передних колес, говорят, что автомодель обладает избыточной поворачиваемостью.Просто запомните, что автомодель с недостаточной поворачиваемостью сталкивается с ограждением передней частью, автомодель с избыточной поворачиваемостью сталкивается с ограждением задней частью, а автомодель с нейтральной управляемостью касается ограждения обоими концами одновременно.
Инструкция по сборке шасси радиоуправляемой машинки на 3d принтере
Количество витков, количество полей, тип обмотки, сопротивление, температура
Не забивайте себе голову этим бредом, действительно не стоит. Если все таки очень хочется, то ссылки в конце статьи в вашем распоряжении.Шпаргалка для холиваров:
В рамках одной модельной линейки моторы с разным Kv отличаются количеством витков обмотки — чем меньше витков, тем больше Kv.
Чем больше полей тем меньше Kv и больше тяги. Чем меньше полей, тем больше оборотов и меньше тяги. Я так понимаю это из за того, что ротор проворачивается быстрей между двумя магнитами по своей оси, чем между 5.
Нормальная температура двигателя до ~90-100 градусов. У меня на треке больше 60 не было. Большая температура плоха, тем, что влияет на параметры цепи. При высоких температурах магниты могут потерять свою силу. Если быть совсем задротом, то еще можно сказать, что при высоких температурах сопротивление от электромагнитной индукции мотора снижается и сила тока растет, что может привести к перегреву, замыканию и возгоранию мотора. Так же это верно, если вы заблокируете колеса, и за счет того, что вращения нет, индукции нет, он вскоре сгорит.
Обмотка дельтой или звездой — как я понимаю на текущий момент, это способы передачи электричества по 3м фазам, принцип подключения так сказать. В больших, не для машинок электромоторах при запуске схемы “звезда” и “треугольник” переключаются автоматически, так как это позволяет снизить нагрузку по току, возникающую при пуске мотора. Например на старте звезда, а дальше дельта.
Круг сил (circle of forces)
Круг сил является полезным способом думать о динамическом взаимодействии между шиной автомодели и поверхностью дороги. На диаграмме ниже мы смотрим на колесо сверху, так что поверхность дороги лежит в плоскости x-y. Автомодель, к которой присоединено колесо, перемещается в положительном y направлении.
В этом примере, автомодель будет поворачивать направо (т.е. положительное x направление направлено к центру поворота). Обратите внимание, что плоскость вращения колеса находится под углом к реальному направлению, в котором перемещается колесо (в положительном y направлении). Этот угол является углом бокового увода.
Предел величины F ограничен пунктирным кругом, F может быть любой комбинацией компонентов Fx (поворот) и Fy (ускорение или торможение), которая не превосходит пунктирного круга. Если комбинация сил Fx и Fy выходит за границы круга, шина теряет сцепление (вы скользите или вас заносит).
В этом примере, шина создает компонент силы в направлении x (Fx), которая, при передаче к шасси автомодели через систему подвески в комбинации со сходными силами от остальных колес, будет вызывать поворот автомодели направо. На диаметр круга сил и, следовательно, на максимальную горизонтальную силу, которую может создавать шина, влияет множество факторов, включая конструкцию шины и ее состояние (возраст и температурный диапазон), качество дорожной поверхности и вертикальная нагрузка на колесо.
Магазины, где покупать
В первой статье я малость задел эту тему, но похоже следует написать лишний раз. В России, Украине, не так много или же практически нет производителей запчастей для машинок. В основном весь товар импортный. Поэтому следует думать о налогах которые вы потенциально можете заплатить покупая на зарубежный сайтах.
Попросите магазин занизить стоимость
Из известных магазинов можно выделить hobbyking, на нем есть как товары его брендов, так и других. Например Turnigy. Но комплектующие от Turnigy, не славятся самыми топовыми характеристиками. Хотя мотором я доволен. Покупал я свое комбо именно там.
А также шасси. Что по факту большая часть машины. Есть еще horizonhobby, rcsuperstore, rcplanet и так далее. На самом деле я их нагуглил только, что 🙂 Дело в том, что я бы рекомендовал изучать товар на этих сайтах, а искать и покупать уже на локальном рынке.
Локальные магазины очень быстро гуглятся и как правило вы найдете все, так как их не так много, ввиду наверное относительно высокой стоимости комплектующих. Разница в цене между заграничным налоги и локальным не такая большая, что бы запариваться с оплатой и ожиданием доставки.
Найдите клубы, друзей, организации которые занимаются этим хобби
Тогда вы наверняка сможете покупать товар по скидочке.
Компании комплектующих которые на слуху: hobbywing — моторы у них как правило черно белые, словно зебра и castle creations — моторы как правило зеленые (с таким описанием на треке вы как профи будете различать комплектующие у других. А вообще на моторах как правило бренд написан).
Обе занимаются по большей части ESC и электромоторами. В чем между ними разница я сказать не могу, опыт только с hobbywing. Меня он устраивает. Castle creations ценником подороже и судя по обзорам там больше настроек. Вы же понимаете, каждому свое и чтобы получить максимум, нужно четко понимать зачем оно надо. Пока вы начинающий, берите – среднее. Вам хватит с головой, я уверен.
Недостаточная поворачиваемость (understeer)
Недостаточная поворачиваемость – условие управляемости автомодели в повороте, при котором круговой путь движения автомодели имеет заметно больший диаметр, чем у круга, обозначенного направлением колес. Этот эффект противоположен избыточной поворачиваемости (oversteer) и в простых словах недостаточная поворачиваемость является условием, в котором передние колеса не следуют по траектории, заданной водителем для прохождения поворота, а вместо этого следуют по более прямолинейной траектории.
Это еще часто называют выталкиванием или отказом поворачивать. Автомодель называют “зажатой”, так как она стабильна и далека от тенденции к заносу.Так же как с избыточной поворачиваемостью, недостаточная поворачиваемость имеет множество источников, таких как механическое сцепление, аэродинамика и подвеска.
Традиционно, недостаточная поворачиваемость имеет место, когда передние колеса имеют недостаточное сцепление во время поворота, таким образом передняя часть автомодели имеет меньшее механическое сцепление и не может следовать по траектории в повороте.
Углы развала, дорожный просвет и центр тяжести являются важными факторами, которые определяют условие недостаточной/избыточной поворачиваемости.Является общим правилом, что производители сознательно настраивают автомодели для наличия небольшой недостаточной поворачиваемости.
Как отрегулировать вашу автомодель для снижения недостаточной поворачиваемостиВы должны начать с увеличения отрицательного развала передних колес (никогда не превышайте угол в -3 градуса для дорожных автомоделей и 5-6 градусов для внедорожных автомоделей).
Другим способом снижения недостаточной поворачиваемости является снижение отрицательного развала задних колес (он всегда должен быть <=0 градусов).Еще одним способом уменьшения недостаточной поворачиваемости является снижение жесткости или удаление переднего стабилизатора поперечной устойчивости (или увеличение жесткости заднего стабилизатора поперечной устойчивости).
Немного теории
Как и сам дрифт, RC-версия этого спортивного зрелища зародилась в Японии. Соответственно, лучшие модели (вернее, их шасси) родом именно оттуда. Само собой, всё модное и интересное быстро перенимают ближайшие соседи самураев – китайцы. Сейчас на рынке полно моделей, которые являются лицензионными-и-не-очень копиями известных и популярных дрифт-шасси.
Сама по себе RC-модель состоит из следующих основных модулей:

Все они в разной степени оказывают влияние на параметры модели, но если для соревнований на скорость требуются дорогущие моторы, качественная дальнобойная аппаратура, RC-резина с хорошими показателями сцепления, то для дрифта… достаточно самых простых комплектующих.
Для того, чтобы машинка вошла в управляемое скольжение, требуется высокий крутящий момент, а не высокие обороты у двигателей. Обратное применимо к серво-мотору, обеспечивающему работу рулевого механизма: для RC-дрифткара требуется высокая скорость, а не большие усилия в ньютон-на-метрах, так как сопротивляться рулению неровности трека не будут.
Кроме того, резина (скорее, пластмасса), призвана обеспечить не максимальное сцепление колёс (как в гоночных RC-моделях), а оптимальное соотношение проскальзывания и сцепления с трассой, с уклоном в скольжение.
И те и те компоненты (двигатели с высоким моментом, но средними оборотами, и сервоприводы с невысоким усилием) относятся к недорогим. А значит компоненты приемлемой производительности и качества установлены уже в RTR-моделях средне-начального ценового диапазона.
Батарейки рано или поздно придётся докупать/менять на силовой литий, так что эту тему тоже можно закрыть.
В первой RC-модели (которую вы рано или поздно всё равно уничтожите, поставите на шкаф или замените на крутой профессиональный дрифткар) должны быть три вещи: прочная и достаточно жёсткая рама, сопротивляющаяся кручению, настраиваемая подвеска и какой-никакой потенциал к ремонту-апгрейду.
Сегодня у нас в гостях Himioto Drift TC. На ней и позажигаем.
Перенос веса (weight transfer)
Перенос веса относится к перераспределению веса, поддерживаемого каждым колесом во время воздействия ускорений (продольного и поперечного). Это включает ускорение, торможение или поворот. Понимание переноса веса является критическим для понимания динамики автомодели.
Перенос веса происходит, поскольку центр тяжести (CoG) смещается во время маневров автомодели. Ускорение вызывает вращение центра масс вокруг геометрической оси, приводя к смещению центра тяжести (CoG). Перенос веса спереди-назад пропорционален отношению высоты центра тяжести к колесной базе автомодели, а боковой перенос веса (в сумме спереди и сзади) пропорционален отношению высоты центра тяжести к колее автомодели, а также высоте его центра крена (разъясняется далее).
Например, когда автомодель ускоряется, ее вес переносится в сторону задних колес. Вы можете наблюдать это, так как автомодель заметно наклоняется назад, или “приседает”. И наоборот, при торможении, вес переносится в сторону передних колес (нос “ныряет” к земле).
Сходным образом, во время изменений в направлении (боковое ускорение), вес переносится к внешней стороне поворота.Перенос веса вызывает изменение доступного сцепления на всех четырех колесах, когда автомодель тормозит, ускоряется или поворачивает.
Например, так как при торможении происходит перенос веса вперед, передние колеса осуществляют основную “работу” торможения. Это смещение “работы” к одной паре колес от другой приводит к потере общего доступного сцепления.Если боковой перенос веса достигает нагрузки колеса на одном из концов автомодели, внутреннее колесо на этом конце будет подниматься, вызывая изменение в характеристиках управления.
Пит-стоп
Для того, чтобы научиться более-менее нормально контролировать машину в заносе, требуется провести первоначальную настройку шасси (в состоянии «из коробки» автомобиль готов к покатушкам, но лучше всё проверить).
Во-первых, специальными шайбами отрегулировать положение колёс: начинать будем с совершенно нейтральных настроек. Колёса выставить вертикально, параллельно корпусу, перпендикулярно осям – в общем, чтобы как в детских машинках, все углы под 90 градусов и никаких излишеств.
Далее проверяем, как машина ездит по прямой: не надо давить «газ в пол», просто убеждаемся, что машину не уводит влево-вправо. После аккуратно делаем развороты через левый и правый борт, без заноса, на минимальной тяге. Если вы всё верно настроили, машину не будет «уносить», она будет разворачиваться примерно по одинаковым радиусам и вести себя предсказуемо.
Теперь надо установить базовые настройки для дрифта. Вообще, параметры установки колёс относительно кузова влияют на поведение модели не меньше, чем мощность мотора и усилие на сервоприводе рулевого механизма. Сперва стоит ознакомиться со статьёй Википедии об углах установки колёс.
Из всех настроек для обучения дрифту нас интересуют только развал передней оси (стоит выставить -4o) и схождение колёс (небольшое отрицательное на передней оси, то есть «расхождение» буквально в пару градусов).
Поиск золотой середины (или сбалансированная автомодель)
Автомодель, которая не страдает от избыточной или недостаточной поворачиваемости, когда она используется на своем пределе, обладает нейтральным балансом. Это кажется интуитивным, что спортсмены будут предпочитать небольшую избыточную поворачиваемость для вращения автомодели вокруг поворота, но это обычно не используется по двум причинам.
Раннее ускорение, как только автомодель проходит апекс поворота, позволяет автомодели набрать дополнительную скорость на последующем прямом участке. Водитель, который ускоряется раньше или резче, имеет большое преимущество. Задним шинам требуется некоторое избыточное сцепление для ускорения автомодели в этой критической фазе поворота, в то время как передние шины могут посвятить все свое сцепления для поворота.
Поэтому автомодель должна быть настроена с небольшой тенденцией к недостаточной поворачиваемости или должна быть немного “зажата”. Также, автомодель с избыточной поворачиваемостью является дерганной, увеличивая вероятность потери контроля во время длительных соревнований или при реакции на неожиданную ситуацию.
Имейте в виду, что это применимо только для соревнований на дорожном покрытии. Соревнования на грунте это совсем другая история.Некоторые успешные водители предпочитают небольшую избыточную поворачиваемость в своих автомоделях, предпочитая менее спокойную автомодель, которая легче входит в повороты.
Необходимо отметить, что суждение о балансе управляемости автомодели не является объективным. Стиль вождения является главным фактором в видимом балансе автомодели. Поэтому два водителя с идентичными автомоделями часто используют их с различными настройками баланса. И оба могут называть баланс своих автомоделей “нейтральным”.
Прирост развала (camber intake)

Прирост развала является мерой того, как изменяется угол развала при сжатии подвески. Это определяется длиной рычагов подвески и углом между верхним и нижним рычагами подвески. Если верхний и нижний рычаги подвески являются параллельными, развал не будет изменяться при сжатии подвески. Если угол между рычагами подвески составляет значительную величину, развал будет увеличиваться при сжатии подвески.
Определенная величина прироста развала является полезной для поддержания поверхности шины параллельной поверхности земли, когда автомодель накреняется в повороте.
Примечание: рычаги подвески должны быть или параллельны, или должны быть ближе к друг к другу на внутренней стороне (стороне автомодели), чем со стороны колес. Наличие рычагов подвески, которые ближе друг к другу на стороне колес, а не на стороне автомодели, будет приводить к радикальному изменению углов развала (автомодель будет вести себя изменчиво).
Прирост развала будет определять, как ведет себя центр крена автомодели. Центр крена автомодели в свою очередь определяет, как будет происходить перенос веса при прохождении поворотов, а это оказывает существенное влияние на управляемость (более подробно об этом смотрите далее).
Сенсоры
Второй, и более интересный параметр — сенсоры.Существуют Sensored и Sensorless. То есть с сенсором и без сенсора.Причем тут сенсоры? Очень резонный вопрос.
Дело в том, что для того, чтобы раскрутить ротор, регулятору необходимо понимать, куда “стрелять”. У мотора есть 3 фазы, если не углубляться в схему, то суть в том, что для вращения ротора регулятору необходимо задействовать те или иные магниты в зависимости от положения ротора.
Именно для нахождения положения ротора и используются сенсоры.Звучит логично, но какая мне разница, что он там и как делает? Дело в том, что от этого зависит сможет ли ваша машинка медленно ездить, а так же плавней и нежней газовать, тормозить. Если вы хотите себе Crawler, а это модели которые ездят медленно, взбираясь по “горам”, то вам точно нужен именно сенсорный мотор.

(у сенсорных моторов на попе дополнительный разъем. Обращайте внимание на спецификацию ESC регулятора, он может не уметь работать с сенсорными моторами. Работать мотор будет, но от сенсора не будет толку)
Бесколекторный бессенсорный мотор не может плавно стартовать, так как регулятор не знает изначальное положение ротора. И поэтому он будет вращать его наугад. Если не придавать должного газку, модель может и не поехать. С началом хоть какого-нибудь вращения вступают в силу электромагнитные приколы индукции и регулятор понимает, что и куда.
Если вы любитель погонять, и любитель резких стартов с пылью, то бессенсорный для вас, лично я своим вполне доволен :)Но исходя из общения с людьми которые участвуют в гонках, для лучшего «чувствования» модели, все равно необходим сенсорный мотор.
Схождение (toe-in) и расхождение (toe-out)


Схождение – это симметричный угол, который каждое колесо составляет с продольной осью автомодели. Схождение – это когда передняя часть колес направлена в сторону центральной оси автомодели.
Передний угол схожденияВ основном, увеличенное схождение (передние части колес находятся ближе к друг другу, чем задние части колес) обеспечивает большую стабильность на прямых участках ценой некоторой медлительности отклика на поворот, а также немного увеличенным сопротивлением, так как колеса теперь идут немного боком.
Задний угол схожденияЗадние колеса вашей автомодели всегда должны быть отрегулированы с некоторой степенью схождения (хотя схождение в 0 градусов приемлемо в некоторых условиях). В основном, чем больше заднее схождение, тем более стабильной будет автомодель.
Однако, имейте в виду, что увеличение угла схождения (спереди или сзади) будет приводить к снижению скорости на прямых участках (особенно при использовании стоковых моторов).Еще одной связанной концепцией является то, что схождение, подходящее для прямого участка, не будет подходящим для поворота, так как внутреннее колесо должно идти по меньшему радиусу, чем внешнее колесо.
Угол бокового увода (slip angle)

Угол бокового увода – это угол между реальной траекторией движения колеса и направлением, в которое оно указывает. Угол бокового увода приводит в результате к боковой силе перпендикулярной к направлению движения колеса – угловой силе. Эта угловая сила увеличивается примерно линейно первые несколько градусов угла бокового увода, а затем увеличивается нелинейно до максимума, после чего начинает уменьшаться (когда колесо начинает скользить).
Ненулевой угол бокового увода возникает вследствие деформации шины. Во время вращения колеса, сила трения между пятном контакта шины и дорогой приводит к тому, что индивидуальные “элементы” протектора (бесконечно малые участки протектора) остаются неподвижными относительно дороги.
Это отклонение шины приводит к росту угла бокового увода и угловой силы.
Так как силы, которые воздействуют на колеса от веса автомодели, распределяются неравномерно, угол бокового увода каждого колеса будет различным. Соотношение между углами бокового увода будет определять поведение автомодели в данном повороте. Если отношение переднего угла бокового увода к заднему углу бокового увода больше, чем 1:1, автомодель будет подвержена недостаточной поворачиваемости, а если отношение меньше, чем 1:1, то это будет способствовать избыточной поворачиваемости. Реальный мгновенный угол бокового увода зависит от многих факторов, включая состояние дорожного покрытия, но подвеска автомодели может быть сконструирована для обеспечения особых динамических характеристик.
Главным средством регулировки образующихся углов бокового увода является изменение относительного крена спереди-назад путем регулировки величины переднего и заднего бокового переноса веса. Это может быть достигнуто путем изменения высоты центров крена, или путем регулировки жесткости крена, с помощью изменения подвески или с помощью добавления стабилизаторов поперечной устойчивости.
Угол развала (camber)

Колесо с отрицательным углом развала.
Угол развала – это угол между вертикальной осью колеса и вертикальной осью автомодели, когда вы смотрите спереди или сзади автомодели. Если верхняя часть колеса находится дальше наружу, чем нижняя часть колеса, это называется положительным развалом.
Если нижняя часть колеса находится дальше наружу, чем верхняя часть колеса, это называется отрицательным развалом.Угол развала влияет на характеристики управляемости автомодели. В качестве основного правила, увеличение отрицательного развала улучшает сцепление на этом колесе при прохождении поворота (в определенных пределах).
Это происходит потому, что это дает нам шину с лучшим распределением сил, возникающих в повороте, более оптимальный угол по отношению к дороге, увеличивающий пятно контакта и передающий силы через вертикальную плоскость шины, а не через поперечную силу через шину.
Другой причиной использования отрицательного развала является тенденция резиновой шины перекатываться относительно себя при прохождении поворота. Если колесо обладает нулевым развалом, внутренний край пятна контакта шины начинает подниматься с земли, таким образом снижая площадь пятна контакта.
Путем использования отрицательного развала, этот эффект снижается, таким образом максимизируя пятно контакта шины.С другой стороны, для максимальной величины ускорения на прямом участке, максимальное сцепление будет получено, когда угол развала равен нулю и протектор шины параллелен дороге.
Правильное распределение угла развала является главным фактором в конструкции подвески, и должно включать в себя не только идеализированную геометрическую модель, но и реальное поведение компонентов подвески: изгиб, искажение, эластичность и т.п.Большинство автомоделей обладают некоторой формой подвески с двумя рычагами подвески, что позволяет вам регулировать угол развала (а также прирост развала).
Центр крена (roll center)
Центр крена автомодели является воображаемой точкой, отмечающей центр, вокруг которого происходит крен автомодели (в поворотах), если смотреть спереди (или сзади).
Положение геометрического центра крена диктуется исключительно геометрией подвески. Официальное определение центра крена звучит так: “Точка на поперечном сечении через любую пару центров колес, в которой боковые силы могут быть применены к подпружиненной массе без создания крена подвески”.
Значение центра крена может быть оценено только в том случае, когда учитывается центр массы автомодели. Если есть различие между положениями центра масс и центра крена, то создается “плечо момента”. Когда автомодель испытывает боковое ускорение в повороте, центр крена перемещается вверх или вниз, и размер плеча момента, объединенный с жесткостью пружин и стабилизаторов поперечной устойчивости, диктует величину крена в повороте.
Геометрический центр крена автомодели может быть найден с помощью следующих основных геометрических процедур, когда автомодель находится в статическом состоянии:
Проведите воображаемые линии параллельно рычагам подвески (красного цвета). Затем проведите воображаемые линии между точками пересечения красных линий и нижними центрами колес, как показано на рисунке (зеленого цвета). Точка пересечения этих зеленых линий является центром крена.
Вам необходимо отметить, что центр крена перемещается, когда подвеска сжимается или поднимается, поэтому в действительности это мгновенный центр крена. Насколько этот центр крена перемещается при сжатии подвески, определяется длиной рычагов подвески и углом между верхними и нижними рычагами подвески (или регулируемых тяг подвески).
При сжатии подвески, центр крена поднимается выше и плечо момента (расстояние между центром крена и центром тяжести автомодели (CoG на рисунке)) будет уменьшаться. Это будет означать, что при сжатии подвески (например, при прохождении поворота), автомодель будет иметь меньшую тенденцию крениться (что хорошо, если вы не хотите перевернуться).
Когда вы используете шины с высоким сцеплением (микропористая резина), вы должны установить рычаги подвески таким образом, чтобы центр крена значительно поднимался при сжатии подвески. Дорожные автомодели с ДВС обладают очень агрессивными углами рычагов подвески для поднятия центра крена при прохождении поворотов и предотвращения переворачивания при использовании шин из микропористой резины.
Использование параллельных, равной длины рычагов подвески, приводит к фиксированному центру крена. Это означает, что при наклоне автомодели, плечо момента будет принуждать автомодель крениться все больше и больше. В качестве основного правила, чем выше центр тяжести вашей автомодели, тем выше должен быть центр крена для того, чтобы избежать переворачиваний.
Шасси
Под шасси подразумевают то к чему все крепится — подвеска, колеса etc. Продаются как в собранном виде так и разобранном. Уверен можно собрать вообще все по деталькам. С непривычки разобраться довольно сложно. Амортизаторы, трансмиссия, всякие дифференциалы, кулаки и много того, чему я даже не знаю точного названия.
Выбор шасси в большей степени обусловлен классом модели который вы хотите, масштабом и запасом прочности.

(под ДВС может немного отличаться креплениями, корпусом)
Я такой человек, что любит в первую очередь глазами, и поэтому увидев свое шасси, офигел от того насколько все прикольно и круто выглядит. Особо долго не думая, решил, что буду брать именно эту модель. У меня BSR Berserker 1/8 Truggy Kit.
В инcтаграммах есть разные аккаунты на тему RC. Если вы любитель эстетики, то там можно насмотреться всякой красоты на эту тему. Например хештег #rccars.
При выборе стоит обращать внимание на материалы. Чем они дешевле, тем чаще вам придется закупаться расходными деталями. Я не экстремальный гонщик и ничего из деталей шасси на замену еще не покупал, но судя по наличию расходников в продаже и видео в интернете как ломаются машинки — об этом стоит думать.
Чем больше пластмассы в шасси тем оно считается дешевле и хрупче. Но это не означает, что оно целиком должно быть из карбона или алюминия, хотя такое бывает 🙂
Как правило материалы миксуют, что обусловлено стремлением к адекватному весу и тем, что не всегда металл лучше. Например, основа и «бабочки» (то, к чему крепятся рычаги подвески и амортизаторы) — алюминий, рычаги подвески — «крепкая пластмасса», а прочие мелкие некритичные крепления — пластмасса «попроще».

(Сюда крепятся колеса у моего шасси)
Задняя бабочка металлическая, к ней крепятся амортизаторы, рычаги подвески, спойлер. Ниже крепится дифференциал (пластик). Клиренс модели регулируется установкой амортизаторов на различные отверстия на бабочке, рычагах подвески, а также заменой самих амортизаторов.
На фото также видно стабилизатор поперечной устойчивости. Изначально шасси было без него, но он шел в комплекте. После первого дня покатушек, понял, что машинка частенько переворачивается на поворотах и все-таки решил поставить стабилизацию. Радости как у настоящего механика 🙂 Похоже Lego в детстве мне не хватило.
У шасси, как и настоящих машин, бывает разная трансмиссия. Полный/неполный привод. Например у моей модели привод полный и аж 3 дифференциала. Передний, задний и по центру который ближе всех к мотору, для согласования задних и передних колес. Дифференциалы соединены валами:
Бывает и ремнями:
Дифференциалы заливаются специальной жидкостью. Эта жидкость бывает различной вязкости. Причем если как у меня 3 дифференциала, то в каждый из них может пойти своя вязкость в зависимости от ваших потребностей (честно, я катаю с тем, что пришло с завода и понятия не имею на что оно влияет, вероятно на управляемость в повороте).
Из интересных особенностей строения — бывают горизонтальные амортизаторы:
В общем, как вы понимаете, поле для тюнинга и настроек шасси безграничное. Но в первую очередь, оно зависит от трека на котором вы собираетесь покорять вершины.
Электромотор
Электромоторы бывают двух основных видов — Коллекторные и Бесколлекторные..
Коллекторные двигатели (brushed, щеточные) дешевле, но модели с такими двигателями развивают меньшую скорость и такие моторы менее надежны.
Вы наверняка где-то видели такие моторчики:
Вот именно это и есть коллекторный мотор. Если внимательно посмотреть на его строение, то самый главный минус очевиден:
Щетки и коллектор механически повреждаются от трения:
Как любой вид электромотора, ротор разгоняется электрическим полем. Величина этого поля зависит от напряжения приложенного к обмоткам, чем большее магнитное поле будет создано, тем быстрее будет крутиться ротор. Питается мотор постоянным током.
Бесколлекторные двигатели (brushless, бесщёточные) – дороже, но способны развить большую скорость, а также более износостойкие. Модель ездит и быстрее, и дольше.
Это более сложный в строении мотор и требует регулятор для работы. (Я так понимаю коллекторный тоже, но в меньшей степени). Подав ток на такой мотор, крутиться вы его не заставите. Износостойкий поскольку щеток у него нет, ротор буквально не соприкасается не с чем кроме подшипника на выходе.
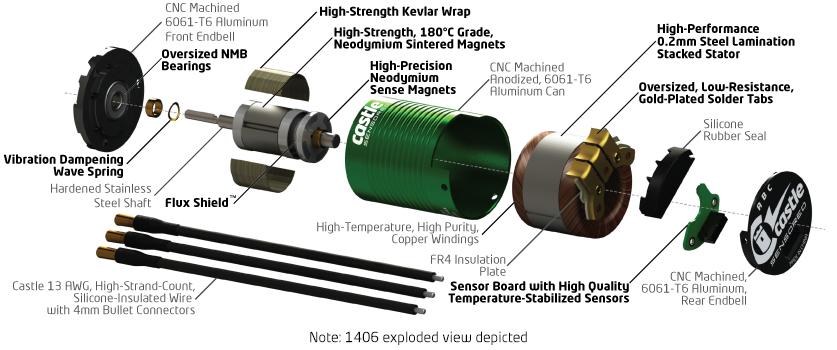
(Это схема навороченного мотора от Castle Creations, но в целом типичная для среднего бесколлекторного мотора на рынке)
Сами бесколлекторные моторы делятся на еще несколько видов. Первый параметр — расположение ротора.
Inrunner — именно этот тип используется в машинках. Движущая часть находится внутри.Outrunner — крутится сам корпус мотора. Такие чаще всего используются в квадрокоптерах.





 купить по привлекательной цене 46990 руб. в Москве")