

Динамика и управление движением колесных роботов
Содержание к диссертации
Глава 1. Исследование движения двухколесного робота с 18
твердыми колесами на плоскости. Синтез динамически гладких траекторий.
угловых скоростей.
Интегрирование уравнений связи. Интегралы Френеля. 23
Примеры синтеза траекторий; 28′
1.4; Зависимость координат конечной точки траектории от ……………… 30
параметров движения. Линейная и нелинейная зависимости.
1.6; Свойства областей достижимости. 39
1.7. Переходная кривая из двух спиралей. ‘.. 42
1.8. Траектории движения системы, содержащие участки прямых. . 45
Алгоритмы движения робота. 1.9. Выводы и заключения к главе Г ….. 52
Глава 2. Сравнительное исследование моделей упругого и твердого. 53
колеса; Движение по траекториям.
Движение одиночного колеса. Преодоление ступеньки. …..7,7
Колесо на наклонной плоскости. 82
Движение двухколеснрго велосипеда по лестнице…. 88
Моделирование движения-робота с дифференциальным приводом…. 91
Выводы и заключения к главе 2. 103
Модели ровера на твердых и упругих колесах. Движение ‘….104
по плоскости.
Движение роверов по плоскости с препятствиями и МО-
наклонной1 плоскости. Сравнение результатов.
Выводы и заключения к главе 3 124
Основные результаты 125
Заключение. План дальнейших исследований 126
О/
Приложение I. Робот с дифференциальным приводом 138
Механическая модель: описание, уравнения 138
Замена координат. Уравнения Чаплыгина в новых координатах … 140
Приведение к виду Коши. Управляемость системы 141
Частные случаи интегрирования уравнений движения 143
Уравнения с управлением.
Решение линейной неоднородной системы 147
Исследование уравнений движения при * 0. Рекуррентные 149
уравнения. Исследование устойчивости движения по прямой.
Расчет траектории и управления в программе Maple 153
Программирование сил и моментов 154
Введение к работе
В современном мире колесные аппараты являются важной составляющей в технике. Во все времена их существования происходили непрерывные усовершенствования. С появлением машин способных передвигаться самостоятельно возникли задачи управления ими, исследовались вопросы автоматического управления. Эта тематика перешла в наши дни в новую стадию – роботизация управления. Теперь автономные системы должны выполнять сложные расчеты, ориентируясь на внешние факторы, и брать на себя множество функций по обработке информации. Такая система, способная самостоятельно получать и обрабатывать информацию, принимать решение о необходимых (адекватных) действиях и выполнять их, контролируя ошибки – это робот.
Первые роботы появились давно и сначала они представляли собой механические аппараты, способные выполнять несколько действий. С развитием механики появлялись новые аппараты, способные ходить и ездить. Серьезный шаг в управлении механическими системами и создании новых роботов произошел в прошлом веке с появлением достаточно сложных электронных компонент. Выход электроники на промышленный уровень и создание первых вычислительных машин привело к активному продвижению робототехники во всем мире. С развитием вычислительных блоков стало возможным решать в автоматическом режиме сложные задачи по управлению. Этому также способствовало развитие языков программирования.
В*настоящее время мобильные роботы распространены по всему миру. Они используются в лабораториях научных институтов и университетов, включаются в образовательные программы и участвуют соревнования, разрабатываются и модернизируются на предприятиях для решения специальных задач (информационной разведки, переноса груза, работы в сложных условиях), входят в повседневную жизнь человека в виде бытовых и игровых устройств. Но, несмотря на фундаментальные и прикладные исследования, задачи по управлению ими до конца не решены. Это связано с различиями кинематических схем аппаратов, различными условиями движения, а также с необходимостью учета реальных факторов движения- при построении строгих математических моделей. Многие общепринятые способы управления колесными системами основываются только на кинематике робота, полученные при этом решения порождают динамические разрывы, например, угловых скоростей колес системы. Новые методы, приведенные в работе, призваны помочь в решении этих проблем, представлен способ исключения указанных разрывов и построения соответствующей схемы управления роботом. Хорошо известно, что многие реальные аппараты имеют упругие колеса. Это могут быть аппараты на колесах с малой и значительной упругостью в колесах (низкого давления). К подобным системам относятся как планетоходы (вездеходы), так и мобильные роботы, предназначенные для движения по твердой поверхности. В ряде стран получили распространение колесные аппараты повышенной проходимости для перемещения и выполнению работ в лесу. На рубеже выхода в космос частных аппаратов и создания планетных баз, все более острыми становятся вопросы разработки новых, более эффективных, видов планетоходов для исследования планет. Для разработки схем управления такими аппаратами необходим учет упругости колес. В рамках исследования этого вопроса настоящей работе представлена численная параметризованная модель упругого колеса и систем на таких колесах.
Рассмотрим некоторые мировые разработки в мобильной робототехнике. На рис.1 представлены роботы с так называемым «дифференциальным приводом». Кинематическая схема этих машин заключается в следующем: два активных управляемых колеса расположены соосно, и вспомогательное пассивное колесо для поддержки корпуса. На первом из приведенных рисунков изображена лабораторная настольная модель робота «КЬерега», разработанного в Швейцарии. Она отличается малым размером и возможностью присоединения различных датчиков, является удобной моделью для отработки программного обеспечения. На втором рисунке изображен робот «Rug-warrior» приспособленный, как и остальные из приведенных моделей для движения по относительно ровному полу. На третьем рисунке изображен робот «РЕКЕЕ», разработанный во Франции. Он имеет возможности для присоединения различных устройств через стандартные разъемы на основной плате. Последний робот «Pioneer 2DX» оснащен ультразвуковыми датчиками для ориентирования на местности.
Рас. 1. Мобильные роботы с дифференциальным приводом.
Все рассмотренные модели имеют одну и ту же кинематическую схему, то есть способ расположения управляемых и пассивных колес. Роботы отличаются размерами, весом, набором датчиков и назначением. Единообразие механической части позволяет исследовать динамику и способы управления такими механизмами с помощью единой теоретической базы. Кроме указанных иностранных разработок имеются российские аппараты того же класса.
Рис.2. Мобильные роботы семейства «Аргонавт».
На рис.2 представлены мобильные роботы семейства «Аргонавт». Они расположены в следующем порядке: «Аргонавт-1», «Аргонавт-2», «Аргонавт-3», «Аргонавт-Е». Все эти роботы построены по кинематической схеме дифференциального привода. Это семейство роботов разрабатывалось с 1998 года в ИПМ им. М.В. Келдыша РАН при участии студентов и аспирантов МГУ им. М.В. Ломоносова. Цель разработок – создание современных интеллектуальных систем, платформ для отработки задач по ориентированию в пространстве. Роботы используют различные сенсоры: фотодиодные сенсоры, оптические датчики, аналоговые и цифровые камеры, звуковые приемники и ультразвуковые датчики.
Мировая практика создания колес содержит множество вариантов – из твердых материалов, резиновые, пневматические, колеса низкого давления. Современные технологии позволяют создавать упругие бескамерные колеса из сложных композитных материалов. Так, например, мировой лидер, компания «Michelin», разработала и изготовила колеса композитные бескамерные колеса. В гоже время автором проводились исследования по созданию компьютерной механической модели колеса. Одна из основных разрабатываемых моделей по виду и структуре оказалась похожей на колеса «Tweel» от «Michelin» приведенных в третьей главе работы, На их основе разработана модель ровера на четырех колесах (программа «INTAS-CNES» по разработке марсоходов). Здесь большую роль сыграли предоставленные участниками проекта данные, Маленков М.И. («ВНИИТрансмаш») предоставил проект ровера, а также необходимые данные по контакту колеса с грунтом. Платонов А.К. и Ярошевский B.C. (ИПМ им. М.В. Келдыша РАН) предоставили необходимые зависимости параметров пневматического колеса при его продавливании.
Рис.3. Проектное изображение ровера и модельная разработка.
Общая характеристика работы. В работе проводится аналитическое и численное исследование динамики и управления движением колесных роботов. Рассматриваются модели с двумя независимо управляемыми колесами и четырехколесные аппараты. Выбор данного направления исследований связан с прикладными задачами исследования колесных роботов, цель которых создание современных интеллектуальных систем, роботизированных мобильных платформ. В работе строится схема управления роботом с «дифференциальным» приводом, обеспечивающая его гладкие динамические движения. Для этого исследуется класс спиральных кривых, которые вместе с прямой и окружностью составляют алфавит базовых траекторий движения. На основе твердотельного моделирования системами многих твердых тел строится численная параметризованная модель упругого колеса. На базе этой модели исследуются различия в движении аппаратов на твердых и упругих колесах. Для роботов с двумя независимо управляемыми колесами исследуется влияние упругости на точность движения по динамически гладкой и негладкой траектории. Четырехколесные аппараты рассматриваются в рамках международной программы разработки марсоходов.
Актуальность темы. Задачи исследования динамики движения мобильного робота и расчета управления им актуальны в связи с возрастающими требованиями к точности работы таких систем, необходимостью составления схем управления обеспечивающих гладкие динамические движения, необходимостью учета влияния податливости колес на движение роботов.
Цель работы заключается в исследовании динамики движения колесных аппаратов на твердых и упругих колесах, составлении управления колесными роботами: разработке схемы управления роботом с двумя независимо управляемыми колесами, обеспечивающая его гладкие динамические движения по плоскости; исследовании точности отработки роботом динамически гладких и геометрически гладких траекторий; разработке параметризованной численной модели упругого колеса и технологии моделирования аппаратов на упругих колесах; исследовании влияния упругости на точность отработки траектории и динамику движения аппарата.
Научная новизна заключается в найденных способах расчета непрерывных по скоростям траекторий робота с двумя раздельно управляемыми колесами, построенных методах синтеза сложных траекторий и бортовых алгоритмах движения мобильного робота, разработанных технологиях моделирования упругих колес и роботов на таких колесах, выявленных различиях в движении аппаратов на упругих и твердых колесах по траекториям и неровным поверхностям.
Методы решения задачи. Поставленные задачи.решаются с применением . аналитических расчетов и методов теоретической механики, использования для-вспомогательных вычислений математического пакета «Maple» (версия . 9.5) и программного комплекса «Универсальный механизм 3.0» (разработанного под руководством Д.КХПогорелова [79, 80, 126, 132]).
Обоснованность результатов определяется полнотой и корректностью выбранной механической модели робота с дифференциальным приводом, строгими методами аналитического исследования движения механических систем, применением для; математических расчетов-, известных и<: отработанных пакетов «Maple», а для механического моделирования- пакета «Универсальный механизм» со сверкой результатов , моделирования: с теоретическими данными и другими численными, моделями.
Работа носит теоретический характер, полученные результаты могут использоваться при разработке управления движением мобильных платформ. Предложенные в работе теоретико-механические численные модели представляют самостоятельную ценность и. являются не только методом достижения поставленной цели, но и, современной технологией исследования движения аппаратов на упругих и твердых колесах.
Структура и объем диссертации. /1,иссертационная работа состоит из введения-; трех глав, заключения; списка литературы, двух приложений., Общий объем диссертации – 157 страниц. ‘
Обзор литературы:
Рассматриваемые в данной работе темы исследования неголономных систем, синтеза траекторий движения роботов, исследование и сравнение свойств твердого и упругого колеса встречаются в различной литературе. Книги [16-18, 22, 26, 32, 37, 38, 43, 53, 87, 90, 92] содержат учебно-научные материалы по неголономным системам. В них рассмотрены общие условия составления уравнений динамики и связей, применение математических методов и другие общие вопросы механики твердых тел. В книге Голубева Ю.Ф. [32] в дополнение к рассмотрению теоретических вопросов получены
уравнения движения мобильной платформы с двумя активными колесами для случая, когда центр масс находится посередине между колесами. Общие методы оптимального управления динамическими системами рассматриваются в [13-15, 45]. Книга Александрова В.В. и др. [13] содержит пример построения управления двухколесной тележкой на основе уравнений кинематики. Поскольку рассматриваемые динамические уравнения в настоящей работе являются нелинейными, то для анализа используется общая теория вывода уравнений с малым параметром Новожилова И.В. [64].
Большой вклад в рассмотрение динамики движения мобильного робота с двумя активными колесами внес Девянин Е.А. В его работах и соавтора Буданова В.М. [23, 24, 35] проведен подробный анализ уравнений движения робота. В них выводятся и исследуются уравнения движения трехколесных роботов с двумя ведущими и пассивным рояльным колесами. .Заданием управления независимыми активными колесами достигается необходимое движение системы. Изучена зависимость фазового портрета системы от значений постоянных управлений и параметров системы учетом асимметрии робота. Для вывода уравнений динамики используются основные теоремы динамики. Получены уравнения для линейной и угловой скорости корпуса системы. Находятся стационарные точки системы, и исследуется движение в окрестности этих точек. Рассматривается эволюция фазового портрета системы при смещении стационарных точек. Определены’ параметры необходимые для устойчивого движения системы. Эти работы достаточно полно описывают динамику системы на основе изучения фазовых портретов. В приложении 1 настоящей работы выведены аналогичные уравнения, движения системы, которые исследуются на предмет получения точного решения и нахождения управления для синтезированных траекторий.
Доклады научной школы-конференции «Мобильные роботы» во ‘ многом посвящены проблемам управления и изучению динамических свойств роботов. Работы [36, 59, 72, 73, 89] посвящены рассмотрению проблем управления- мобильными роботами, часть из которых имеет два активных колеса, другая три активных колеса. Также имеются работы по навигации с использованием маяков [21, 33, 34]. В настоящей работе не рассматривается задача навигации по маякам, но рассматривается задача движения на точку, в качестве которой может выступать маяк. При этом используется большее число элементарных траекторий движения аппарата, а составление сложных траекторий движения робота ведется на основе нескольких условий непрерывности. В работе [42] вводится управление на основе экспоненциального затухания рассогласования как один из методов управления системами.
В статьях Матыненко Ю.Г. [55-61] рассмотрена механическая модель робота с двумя активными колесами. Часть работ написана в соавторстве с Ленским A.B., Кобриным А.И. и Гусевым Д.М. В работах изучены и решены задачи динамики и управления роботами, рассмотрены вопросы устойчивости робототехнических систем. В качестве уравнений принимаются уравнения механики вместе с электромеханическими
уравнениями двигателей. При рассмотрении траекторий движения и определения управления роботом при движении по ней выбираются схемы движений типа «поворот и движение на точку», «движение по окружностям и прямым», что не всегда корректно и осуществимо такими системами. В настоящей работе модели двигателей проще — они заданы линейными функциями. Но синтез траекторий проводится с соблюдением большего числа условий непрерывности координат и скоростей при движении. Управление системой определяется через систему уравнений движения.
Проблеме синтеза управления и динамике мобильных роботов посвящена работа Охоцимского Д.Е., Павловского В.Е.[72], а также работы Павловского В.Е. [74-77] в соавторстве с Шишкановым Д.В., Петровской Н.В. В [74-76] и диссертационной работе [125] рассмотрены системы многих связанных тележек с двумя колесами. Одна из тележек имеет активные колеса. Установлено, что такая система имеет только две степени свободы. Рассмотрены методы составления траектории движения такой системы по реперным точкам и коридорами с помощью кривых спирального типа и прямых. Получены необходимые для осуществления такого движения управления. В отличие от описанных работ, в данной предложен метод анализа кривых спирального типа, выведены методы решения задачи приезда в точку для случая с ограничениями на значения скоростей и времени, предложены конечные алгоритмы расчета траекторий, на основе полученной теории приведены бортовые алгоритмы движения мобильного робота.
В диссертации Гусева Д.М. [115] проводится исследование динамики и построение алгоритмов управления мобильным колесным роботом с двумя активными и одним опорным рояльным колесом. Динамика исследуется на базе уравнений Аппеля с управлением в виде напряжений. Проводится анализ возможности вибрационного ускорения двускатной тележки за счет весомого переднего ската. Решается задача построения карты местности. Планирование траекторий движения аппарата осуществляется с помощью сплайновых кривых на основе кубических интерполяционных функций. В результате появляется алгоритм планирования движения, его работа моделируется на компьютере. Для управления роботом при движении по траектории используется рассогласование между текущим положением корпуса аппарата и заданной траекторией. При этом траектория разбивается на множество отрезков прямых, решение ищется для аппроксимированной кривой. Кроме этого в работе имеется моделирование динамики робота при движении по полигону.
Работа [115] близка по характеру к данной. Основные отличия заключаются в том, что составление траекторий движения робота ведется на основе кривых разного типа, что вызвано различиями в подходе к решению задачи (предположений). Для управления в данной работе используется только прямой способ задания напряжений. При любых расчетах траекторий и моделирования движения по ним не производится их аппроксимация, работа ведется с исходными кривыми. Моделирование динамики проводится для широкого класса моделей, при этом исследуются как модели на твердых, так и на упругих колесах.
Работы Лобаса Л.Г. [49], Лобас Людм.Г. [50], Пойды В.К. [82- 85], Чудакова Е.А. [93 – 95] посвящены исследованию движения аппаратов на четырех колесах. Несмотря на различие кинематической схемы рассматриваемых аппаратов, их траекториями движения являются переходные кривые, которые гладко соединяют прямую и окружность. Данная серия ведет начало от работ Чудакова Е.А. В его публикациях рассмотрены участки траекторий, которые осуществляют гладкий переход от прямого участка пути к пути с постоянным радиусом. Это кривые, которые плавно меняют кривизну. На основании этого рассматривается вопрос устойчивости движения автомобиля по такой траектории. Устойчивость подразумевает отсутствие бокового проскальзывания колес при движении. Выписываются реакции в колесах при движении по таким траекториям и выводятся уравнения кривых при условии, что реакции не превосходят критического значения. В ряде случаев учитывается заданная (постоянная)! угловая скорость вращения рулевых колес. Получена зависимость изменения длины кривой от положения центра масс и степени устойчивости движения автомобиля. В другой работе Чудакова Е.А. [94, 95] представлены требования, предъявляемые к переходным кривым, и рассмотрены три типа кривых. Далее представлены требования траекториям применительно к движению автомобиля по дороге – длина, изменение кривизны, скорость поворота управляемых колес. Выведены формулы, с помощью которых эти параметры в конкретно заданном случае могут быть приведены в. нужный диапазон.
В рассмотрении путевой устойчивости движения колесного аппарата работы Пойды В.К. идут вслед за работами Чудакова Е.А. Проводится исследование движения трехколесной и двускатной тележки. Последняя система идентична роботу с дифференциальным приводом, рассматриваемым в настоящей работе. При рассмотрении трехколесной тележки подразумевается, что одиночное колесо является поворотным. Корпус не рассматривается, взамен него введен однородный стержень, соединяющий колеса. В качестве параметров управления рассматриваются угловое и линейное ускорения. Траектории движения получены из динамических уравнений при условии постоянства управлений. На основе уравнений связи получены кривые определяющие след системы в декартовых координатах – это кривые спирального типа (клотоиды). Приведены примеры клотоид, и рассмотрены некоторые свойства этих кривых, предельные окружности.
Заключительной работой в этом ряду является книга Лобаса Л.Г. [49]. В ней рассмотрены движения управляемого и неуправляемого колесного экипажа. В качестве основной системы принят автомобиль. Но эта система упрощается до трехколесного и двухколесного экипажа. Движение неуправляемого экипажа изучается при некоторой заданной ориентации передних поворотных колес относительно продольной оси. При этом изучено изменение скорости поворота поворотных колес, длина пройденного пути, плавность входа в поворот. Управляемое движение рассматривается с помощью задания закона изменения угла ориентации передних колес. Исследованы случаи задания ускоренного управления (угловое ускорение больше нуля), равномерного и замедленного. Приведены траектории движения автомобиля в этих случаях. Это кривые спирального типа — клотоиды. В случае пренебрежения инерцией колес найдены траектории движения трицикла по плоскости. Исследовано влияние выноса рулевого колеса на изменение траектории движения аппарата при задании начальных условий движения.
Вид спиральных кривых приводится также в работе Лобас Людм.Г. [50]. Здесь исследовалось движение трицикла и влияние на него угла наклона рулевой стойки к вертикали и выноса колеса.
Рассмотренные выше работы имеют отношение к переходным кривым, использующимся в геодезической практике трассирования дорог при сопряжении прямолинейных отрезков пути с круговыми. Нахождение этих кривых определяется заданием ряда критериев качества движения, например, равномерное возрастание центробежной силы. Неисследованным остается вопрос о принадлежности такого движения к классу истинных траекторий движения экипажа. Последнее’ необходимо решать на основе динамической постановки задачи и интегрирования уравнений движения. Практически все рассматриваемые системы имеют выносное рулевое колесо или пару колес.
В настоящей работе принята более простая по отношению к предыдущим система, состоящая- из двух активных колес. Уравнения выписываются с учетом динамики корпуса и колес, а также введенными моделями электродвигателей, что не рассматривалось в этих. работах. То есть, рассмотрено управляемое движение системы. Сглаживание траекторий производится на базе постановки условий непрерывности, а не устойчивости движения на повороте. Кроме того, рассматривается, как с помощью найденных кривых перевести систему из заданного начального положения в заданное конечное положение.
Работы по динамике и управлению в робототехнике рассмотрены в работах Д.Е. Охоцимского [67-73]. Эти работы посвящены исследованию управления и динамике шагающих роботов.
Явление «шимми» переднего колеса трехколесной системы впервые было исследовано Келдышем М.В. [40, 41]. Именно он, показал, что интенсивное гашение колебаний может сделать неустойчивое движение устойчивым. При этом использовался феноменологический подход к исследованию движения колеса. Разработана теория, связывающая силы реакции при качении колеса, геометрические связи, кинематические связи с параметрами увода и деформации колеса.
В книге Метелицына И.И. [62] также проводится исследование устойчивости движения автомобиля. При этом траектории движения упрощаются по отношению к работам Чудакова Е.А. и Пойды В.К., но усложняется модель транспорта – вводятся эластичные шины в передних поворотных колесах. Такая постановка является переходной от работ посвященных исследованию траекторий движения аппаратов к работам посвященным изучению влияния на движение эластичных колес, шин. Установившееся движение является поступательным, прямолинейным и равномерным. Для движения с упругим колесом при некоторых упрощениях исследовано влияние бокового сдвига пневматика на движение системы. Показано, что интенсивное гашение колебаний может сделать неустойчивое движение устойчивым.
Работы Вильке В.Г. [25-31], выполненные в соавторстве с Дворниковым М.В. и Кожевниковым И.Ф. посвящены рассмотрению моделей одиночного колеса. В [25] рассматриваются механические системы с бесконечным числом степеней свободы. Обобщаются на случай систем с бесконечным числом степеней свободы уравнения Лагранжа, Гамильтона. Рассматривается асимптотический метод построения приближенных уравнений, описывающих эволюцию движений сложных механических систем, описание движения системы с помощью интегральных характеристик. В [29] предлагается модель пневматика как системы с бесконечным числом степеней свободы, когда его поверхность представлена деформированной поверхностью тора. Модель колеса состоит из твердого диска, деформируемой боковой поверхности шины и нерастяжимого бандажа. Рассматриваются деформации всей поверхности, как в зоне контакта, так и. на свободной поверхности. Контакт с плоскостью происходит без проскальзывания. Найден функционал потенциальной энергии деформации пневматика, получена полная система уравнений, исследовано два частных случая. В [30-31], а также диссертации [119] рассматривается модель колеса с армированной шиной. Но в этих случаях боковые части шины представлены армированными мембранами из несжимаемой резины, а при деформациях бандажа учтены точные нелинейные условия нерастяжимости армирующих волокон. Также получена полная система уравнений и условия на границе зоны контакта. Контакт с плоскостью с проскальзыванием (модель сухого трения). Исследованные режимы движения – это прямолинейное поступательное движение с постоянной скоростью и верчение вокруг вертикальной оси.
В’ настоящей работе рассматривается модель упругого колеса. Модель разрабатывается в численном виде путем моделирования системы многих твердых тел. То есть исследуется не бесконечномерная среда, а множество тел с конечным числом степеней свободы. Все тела в такой модели твердые, что позволяет использовать для вывода уравнений движения методы аналитической механики. Это дает возможность исследовать достаточно сложные режимы движения колеса и аппаратов на таких колесах, и, кроме того, проводить моделирование различных случаев за относительно небольшое время.
Математическая модель колеса, а также модель колесного экипажа представлена Новожиловым И.В. в [64-66], а также в соавторстве в [46]. Здесь построена модель качения деформируемого колеса, объединяющая модели Картера, Рокара, Фромма, Келдыша, и позволяющая рассматривать случаи пробуксовки, заноса колеса. Автор ввел фиксированный по форме, малый по толщине геометрический элемент, прилегающий к плоскости и связанный с пятном контакта пневматика. Для указанного элемента допускается проскальзывание по опорной плоскости. Модельный подход [65] к изучению движения колеса основан на «ЬгиБЬ-модели» Фромма, в которой применены бесконечно малые «щетинки» – упругие безынерционные контактные элементы. Конец щетинки (является точкой), контактирует с плоскостью по закону Кулона. В настоящей работе принят аналогичный контакт колеса с поверхностью, имеющий свои особенности, но модель колеса построена по другой схеме. В результате, полученная модель опирается на поверхность несколькими площадками, каждая из которых имеет для контакта порядка 10 выделенных точек.
Книга Рокара И. [88] посвящена рассмотрению движения аппарата на упругих колесах. В ней рассматриваются неустойчивые механические системы. В качестве примера одной из систем приведена модель автомобиля на четырех колесах. При этом рассматривается движение аппарата как на четырех твердых колесах, так и с учетом боковой упругости шин. Получены условия устойчивости движения автомобиля по прямой в этих случаях. Книга Неймарка Ю.И. и Фуфаева Н.А. [63] посвящена рассмотрению динамики неголономных систем. В работе рассмотрены задачи путевой устойчивости систем с качением. Исследуется влияние деформируемости пневматика на процесс качения. Рассматриваются теории Рокара И. [88], Келдыша М.В. [40]. Используя последнюю теорию, выводятся уравнения движения экипажа на нескольких баллонных колесах при его малых отклонениях от прямолинейного движения с постоянной скоростью. Рассматривается шимми передней подвески автомобиля. Найдены области путевой устойчивости автомобиля при движении по траектории близкой к прямой. Кроме этого исследуются и другие экипажи на баллонных колесах: велосипед, шасси самолета.
В данной работе имеются модели четырехколесных экипажей и двухколесного велосипеда. Построение этих моделей ведется на основе построения численной механической модели из твердых тел. Задача движения большого числа связанных тел сложна для теоретического рассмотрения, но успешно решается с помощью численного моделирования. Это движения велосипеда по лестнице, движение четырехколесного аппарата по наклонной плоскости, движение по плоскости с препятствиями.
Работа Левина М.А. и Фуфаева Н.А. [47] описывает феноменологический и модельный подход к получению уравнений описывающих связь между переменными, описывающими движение колеса и действующими со стороны опорной плоскости силами. Представлена модель колеса состоящая из набора твердых дисков с деформируемой периферией, закрепленных на общем валу. На диске закреплены стержни, имеющие продольную, боковую и радиальную податливость по отношению к диску. Для обеспечения непрерывности деформаций имеется нить, связывающая концы стержней. Нить предварительно натянута и имеет податливость при натяжении. Периферия считается безмассовой, опорная поверхность является абсолютно твердой, длина области * контакта значительно меньше радиуса колеса. Проводится рассмотрение однодискового колеса. Определяются деформации и реакции в области контакта катящегося колеса с простейшей деформируемой периферией (стержни без нити).
Численное механическое моделирование систем с большим числом степеней свободы представлено в работах Погорелова Д.Ю. [79, 80, 126, 132]. Он является разработчиком программного комплекса «Универсальный механизм». Данная программа активно использовалась автором при моделировании движения различных систем. Она позволяет для описанной специальным образом механической системы, автоматически создать и проинтегрировать уравнения движения. Механическая система составляется из твердых тел, шарниров, силовых связей. Количество степеней свободы может достигать тысяч. Для сложных систем, составление уравнений которых не поддается теоретическому анализу и решению, применение численного механического моделирования решает задачу исследования.
В- диссертационных работах приведенных в последней части списка литературы представлены разработки в области исследования динамики механических систем, построения (оптимального) управления, исследования движений роботов, построения маршрутов движения и работы по качению колеса по поверхности.
Содержание работы.
Во> введении дан обзор работ, относящихся’ к теме диссертации, и разобраны вопросы, связанные с актуальностью темы, целью работы, методикой исследований, достоверностью результатов, научной новизной, диссертации, теоретической и практической ценностью работы.
В первой главе разработана схема управления роботом с двумя раздельно управляемыми колесами, обеспечивающая гладкие динамические движения при перемещении системы по плоскости в заданное конечное положение. Определены случаи возникновения разрыва угловых скоростей при движении системы, вводятся дополнительные условия для устранения этих разрывов. На основе условий непрерывности и уравнений связи получен класс спиральных кривых, которые использованы в дальнейшем для синтеза траекторий.
При составлении траекторий движения робота, состоящих из окружностей и прямых, в точках перехода с одной кривой на другую (кривую или прямую), возникают скачки угловых скоростей вращения колес. В работе получено общее условие отсутствия указанных скачков, как непрерывность ориентированной кривизны кривой (траектории движения). Для обеспечения гладких динамических движений робота на любой траектории (устранения разрывов угловых скоростей вращения колес) введен дополнительный режим движения в виде участка с линейным изменением угловых скоростей колес.
Подстановка такого типа движения в динамические уравнения задает кусочно-линейный закон изменения управляющих напряжений, определяющие уравнения которых приведены в приложении к диссертации. На указанном линейном участке проинтегрированы уравнения связи системы, в результате получены параметрические уравнения , определяющие траекторию движения центра оси колес и изменение ориентации корпуса. Уравнения содержат интегралы Френеля и задают на плоскости (ХУ) спиральную кривую типа спирали Корню.
Для указанного типа движений построены области достижимости роботом точек декартовой плоскости вокруг него. Они позволяют упростить схему планирования траектории, состоящей из спиральных кривых. При этом учтены ограничения на угловые скорости вращения колес и время движения по кривой. Исследована зависимость геометрии указанных областей от кинематических характеристик робота. Приведены методы расчета параметров одной спиральной с помощью построения области достижимости. Тем самым решена задача перемещения робота в заданную точку с заданной конечной ориентацией при выполнении условий непрерывности и краевых условий для координат и скоростей системы. Составлен алфавит базовых движений (прямая, окружность, спираль) и построен набор схем планирования траектории составленных” из одной спирали, двух спиралей, двух спиралей и участков прямых; приведены примеры составления траектории из двух окружностей и спирали.
Приведены правила расчета точек переключения управления при движении мобильного робота по спиральным траекториям и прямым; указанные алгоритмы используют простые формулы для расчета на бортовой системе, учитывают текущие навигационные данные, вычисляются постоянно во время движения системы.
Во второй главе на основе твердотельного моделирования системами многих твердых тел разработана технология моделирования упругих колес, в том числе позволяющая моделировать пневматическое колесо. Представлено полное описание предлагаемых моделей. В качестве основной модели строится и исследуется нелинейно-упругое колесо с постоянным периметром оболочки, называемое двумерным. Указанный метод твердотельного моделирования позволяет перейти от тела с бесконечным числом степеней свободы к системе с конечным числом степеней свободы, от дифференциальных уравнений в частных производных к уравнениям с полными производными. Для моделирования системы применяется программный комплекс «Универсальный механизм».
Приведена процедура нахождения функции упругости связей в колесе и ее коэффициентов для описания внутренних силовых взаимодействий в модели колеса, приводящих его к заданным параметрам (пневматическому колесу). В результате серий экспериментов с одиночным колесом и аппаратами на упругих и твердых колесах выявлены различия в динамике их движения. Моделирование одиночного колеса позволило оценить возникающие перегрузки и моменты, прикладываемые к нему, при преодолении препятствия. Моделирование движения двухколесного аппарата с кинематикой велосипеда на упругих колесах по лестнице позволило построить схему расположения центра масс системы эффективно снижающую нагрузки на оси колес, повышающую устойчивость аппарата против опрокидывания. Аналитическая модель робота с двумя раздельно управляемыми колесами дополняется расширенной численной моделью, обладающей возможностью изменения параметров, в том числе пятна контакта. В результате серий численных экспериментов движения робота с «дифференциальным приводом» получено, что движение по динамически гладким траекториям происходит с точностью на порядок выше, чем движение по геометрически гладким траекториям. Найдено влияние эффекта деформации колеса на точность движения робота с дифференциальным приводом по заданной траектории для ряда значений параметров, заключающееся в ухудшении точности отработки траектории (продавливание 1% от радиуса, погрешность достижения конечной точки 5% от длины пути; продавливание 20% от радиуса, погрешность достижения конечной точки 60% от длины пути).
В третьей главе разработана технология моделирования движения роверов (4-х колесных аппаратов) на колесах с низким давлением по сложным поверхностям (разрабатывалась для заданий и условий проекта INTAS-CNES* №4063 «Innovative Mars Exploration Rover Using Inflatable Or Unfolding Wheels»). Численная модель ровера использует разработанные во второй главе нелинейно-упругие колеса. Приведено полное .-описание рассматриваемых систем, а также описание серий экспериментов с ними. Исследовано движение систем по наклонной плоскости с углом наклона от 30 до 34 град., плоскости с препятствиями высоты отR/5 доR/2 (R=J.3m радиус колеса), падение на плоскость (с высотыJ.5m) и наклонную плоскость. Условия моделирования (сила тяжести, камни, уклоны) соответствуют данным о планете Марс. В результате получены выводы о различиях в движении аппарата на упругих и твердых колесах, заключающиеся в уменьшении перегрузок (в 5-10 раз), передающихся на ось колеса и корпус (бортовую аппаратуру), повышении проходимости аппарата при перемещении по местности с препятствиями, увеличении средней скорости движения по препятствиям, значительном уменьшении максимальных углов наклона корпуса (в 1.5-2 раза) и угловых ускорений корпуса (в 5-10 раз) при переезде через препятствие (соскальзывании с камня), что значительно уменьшает влияние ударов и рывков на корпус. Получено заключение о том, что ровер (с характеристиками: база 2*1.5 м, масса 280 кг, радиус колес 1.3 м, давление в колесе 1.5 кПа) удовлетворяет заданным конструктивным требованиям по перегрузкам и преодолеваемым препятствиям.
В приложениях приведены материалы, разработанные для решения ряда задач при расчетах управления, траекторий и моделировании. Рассмотрена аналитическая модель робота с двумя раздельно управляемыми колесами. Приведены уравнения связи и динамические уравнения в форме уравнений
Чаплыгина, которые позволяют рассматривать поведение системы в зависимости от управляющих напряжений на электродвигателях. Последнее используется для расчета управления при планировании и моделировании движения. Результаты этого раздела повторяют во многом работы Е.А.Девянина и В.М.Буданова. Приведены элементы компьютерного кода, применяемые для численных расчетов.
В заключении приведены основные результаты диссертационной работы.
Робот для состязаний: колесная база робота
Частично навеяно мыслями из
статьи
на
legoleaguecoaching.org
Очевидно, что данных сообщений на данную тематику будет несколько, так что это только начало.
Широкая или узкая колесная база?
В зависимости от задания, необходимо определиться, какая колесная база будет лучше подходить для его выполнения:
Если рассматривать сборку робота по танковой схеме, то робот с большим расстоянием между колесами выигрывает в точности. Конкретнее, в точности выполнения поворотов.
Это обуславливается тем, что стандартные двигатели NXT не выполняют повороты точно на то количество градусов, которые здаются при программировании.
Можно провести небольшой эксперимент. Пусть к NXT блоку к портам “B” и “C” подключены два мотора. Также пусть есть программа, которая запускает моторы для поворота на некоторое количество градусов, после чего проверяет на сколько они реально провернулись и выводит на экран это число вместе с относительной ошибкой поворота (в процентах) для каждого мотора.
Например, “45-0.0 49-8.8”, показывает, что один двигатель повернулся на 45 градусов, относительная ошибка поворота 0.0%, в то время как второй двигатель повернулся на 49 градусов и ошибка поворота (от 45 градусов) составляет 8.8%.
Вот, что такая программа может вывести: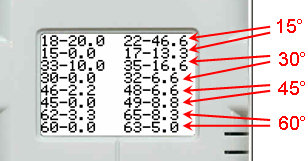
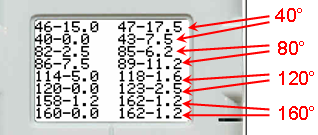
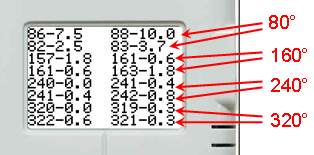
Из полученных таблиц можно сделать несколько выводов:
1. Очень редко, когда двигатель поворачивается на то количество градусов, которые ему задаются в программе.
2. Меньшее количество градусов заданное для поворота, вызывает большую относительную ошибку поворота, большее количество градусов поворота, вызывает меньшую ошибку.
Стоит отдельно пояснить, что такое относительная ошибка поворота и на что она повлияет при движении, а конкретно при выполнении поворота всем роботом целиком.
Допустим, что было расчитано, что для того чтобы проехать 10 см., колесо должно провернуться на 180 градусов. Если мы говорим, что относительная ошибка поворота – 5%, т.е. двигатель повернулся на 189 или на 171 градус, то для робота это значит, что он проедет не 10 см, а 11 см. или 9 см.
Так что же произойдет в этом случае во время поворота всего робота?
Следующие объяснения в виде изображений должны пролить свет на ответ.
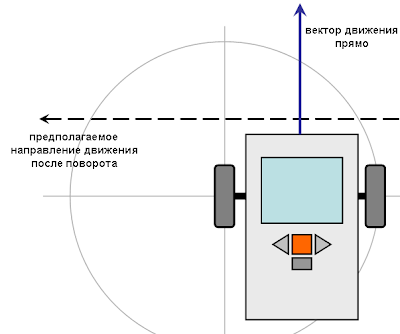
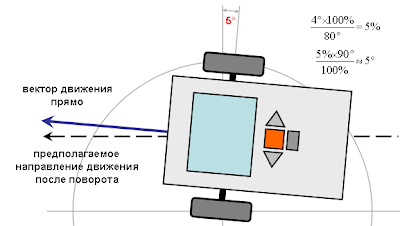
В иллюстрации видно, что при недовороте одним колесом на 4 градуса из 80, происходит 5% ошибка поворота. Следовательно колесо не довезет робота до нужной позиции и при последующем движении прямо, он поедет сильно отклоняясь от предполагаемого направления движения.
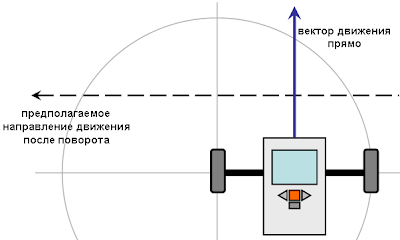
Для сравнения и ответа на вопрос “Широкая или узкая колесная база?” можно взглянуть на следующие схемы:
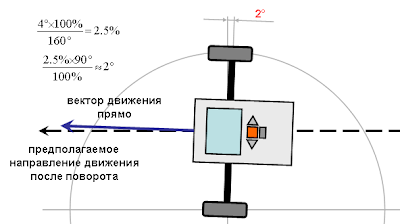
Очевидно, что при расширении колесной базы колесу робота нужно проехать большее расстояние чтобы выполнить поворот. Например, теперь роботу нужно повернуть колесо на 160 градусов. При абсолютной ошибке в 4 градуса, относительная ошибка уменьшится до 2.5%. Т.е. робот после поворота будет гораздо ближе к предполагаемому направлению движения.
Поскольку колесная база ведет к увеличению расстояния, которое нужно пройти роботу для выполнения поворота, то следует вывод, что это также ведет к увеличению времени, которое робот затратит на этот разворот. Поэтому, как итог ответа на изначальный вопрос, можно сказать что, если по заданию робот должен быть быстрым, но не точным в разваротах – выбор падет на узкую колесную базу, если же нужно выполнять развороты как можно точнее, чтобы спозиционироваться правильнее на трассе, но скорость разворота неважна (скажем, их не так много) то следует продумать использование широкой колесной базы.
Собака робот aibo » игровые роботы
Aibo – самая инновационная робот-собака на данный момент. Мы понимаем, что полноценный
человеческий ИИ еще не создан, а от собаки требований в этом плане меньше, то
Аибо является самым интересным устройством в продаже. Кроме всех
очевидных возможностей и преимуществ робота – любопытен один факт: эта собака любит смотреть телевизор. Что-то в этом есть интересное…

$2500
Видео собака робот SONY AIBO 2023!
Собачка AIBO-ERS-210

Краткое описание:
В комплект поставки помимо самой собаки входит: Мячик Батарейка AC адаптор
Conversion Plug Release Pin Чтобы AIBO функционировал нормально желательно
приобрести AIBO Life, Hello AIBO! или Party Mascot.
Aibo — представитель первого поколения домашних роботов, созданных исключительно для развлечения.
Его имя произошло от слияния двух выражений A.I. (Artificial Intelligence – искусственный интеллект (англ.)) и roBOt.
Получившееся сокращение по звучанию совпадает с японским словом “друг”, “товарищ”.
Aibo ERS-210 робот второго поколения, логичный апгрейд первого поколения.
Сохранив и, более того, развив все функции и способности своей предшественницы,
новая Aibo научилась выражать 6 видов различных эмоций: счастье, грусть, злобу,
удивление, страх и неприязнь. Каждое из имитируемых чувств выражается через звуковые сигналы и мелодии,
издаваемые собакой (так называемый “звукоязык” Aibo), соответствующими движениями и световыми сигналами.
Что касается чувств, то Aibo одарена четырьмя: зрением (обеспечивается встроенной цифровой камерой системы CMOS image sensor,
способной оценивать расстояние и воспринимать цвета), слухом (обеспечивается 2 стереомикрофонами),
осязанием (сенсоры, реагирующее на прикосновение, изменения температуры) и чувством равновесия.
У Aibo есть элементарные инстинкты, присущие большинству живых существ.
Теперь они гораздо более совершенны и способны развиваться и закрепляться.
Это интерес к окружающему миру, стремление к общению, потребность движения,
потребность игры с любимыми игрушками и запрограммированный инстинкт поиска питания
(просто каждые полтора часа собаке нужно подзаряжать литиевые батареи).
По сути движения айбо остались фактически прежними, с той разницей,
что их исполнение происходит более естественно и разнообразно.
Это хитрое японское изобретение бегает, прыгает, растягивается, сидит, лежит, виляет хвостом,
и вдобавок ко всему выполняет несколько специальных игровых движений.
18 динамических сцеплений механизма обеспечивают роботу 20 степеней свободы.
Самой интересной чертой японского механического зверя является способность взрослеть и обучаться.
В жизни Aibo ERS-210 проходит четыре последовательных этапа, каждый из который
отличается особенностями поведения и реакций на окружающую действительность.
Эти стадии – младенчество, детство, взросление и зрелость. В начале “жизненного” пути Aibo
плохо распознает команды и вообще не слишком адекватно реагирует на различные ситуации.
Взрослая собака различает около 40 приказов и слов и уже имеет свой сформировавшийся индивидуальный характер.
Как это происходит? Когда вы играете с робособакой Aibo, зовете,
гладите, или же наоборот ругаете и не позволяете что-нибудь делать, то электронный мозг запоминает одобренные
или непоощряемые действия, и строит дальнейшую модель поведения в соответствии с приобретенным опытом.
Таким образом, у Aibo появляются свои предпочтения, любимые и нелюбимые места и занятия.
Робот реагирует на звуки и запросто может проявить интерес к вашему разговору,
начав подражать человеческой речи своим синтезатором “звукоязыка”.
Если хозяин не будет обращать внимания на своего питомца, то Aibo начнет злиться или, в конце концов,
просто впадет в индифферентное летаргическое состояние.
Sony выпускает несколько наборов комплектующих для своего проекта.
В него будут входить различные модификации необходимых memory-карт для робота,
программные пакеты (апдейты) с новыми играми и т.д. Самое интересное, что
Aibo можно подключить к персональному компьютеру.
Характеристики робота:
Компоненты:
Туловище, голова, хвост, 4 лапы (съёмные)
Память: Memory Stick™
Движущиеся части:
Челюсть 1 степень свободы
Голова 3 степени свободы
Нога 3 степени свободы у каждой из 4х лап
Ухо 1 степень свободы у каждого из ушей
Хвост 2 степени свободы
Всего 20 степеней свободы
Ввод/вывод:
Разъём PC card Type2
Разъём Memory Stick™
Разъём питания
Видео вход: CMOS матрица
Аудио вход: Миниатюрные микрофоны
Аудио выход: Миниатюрный громкоговоритель
ЖК дисплей: Время, громкость, состояние батарей
Встроенные датчики:
– Датчик температуры
– ИК-датчик расстояния
– Датчик ускорения
– Сенсорные датчики (голова, спина, подбородок, лапы)
– Датчик вибрации
Встроенные часы: Дата и время
Расход энергии:
Примерно 9 Вт в стандартном автономном режиме
Время работы:
Примерно 1.5 ч. в стандартном автономном режиме
Размеры (ширина/высота/длина) 154/266/274 (без хвоста)
Вес Примерно 1.4 кг.
Цвет Золотой, серебряный и чёрный
Аксессуары в комплекте:
Адаптер питания, LI-Ion батареи ERA-201B1, мячик, документация, и т.д.
Допустимая температура От 5 до 35 oC
Допустимая влажность От 10 до 80%
Домашнее видео движения собачки.
AIBO-LM ERS-311/312

Краткое описание:
Модели серии AIBO LM – ERS-311 и ERS-312 получили наименования “LATTE” и “MACARON” благодаря соответствующим цветам корпуса – цвета слоновой кости и цвета древесного угля. Новые модели отличает расширенный словарь (роботы понимают уже 75 слов), усовершенствованную систему фотосъемки и распознавания голоса, новые возможности интерактивных сенсоров.
Оригинальная, симпатичная и дружелюбная внешность, созданная всемирно известным специалистом по визуальному дизайну Катсура Мошино (Katsura Moshino), отличает роботов-собачек серии AIBO LM от их предшественников. Специалисты Sony рассчитывают, что это дизайнерское решение повысит привлекательность роботов AIBO для более широкой доли рынка. «Серия AIBO LM знаменует собой начало рыночной экспансии этой категории продуктов, определяет будущую роль домашней робототехники для развлечения и удовлетворяет ожидания более широкого и разнообразного круга потребителей», – сказал Никлас Бабин, генеральный директор европейского подразделения Sony Entertainment Robot. «Опыт продаж и 1-ого и 2-ого поколений AIBO помогли нам лучше понять потребительские мотивации и пожелания наших клиентов. Кроме того, корпорация Sony выявила рыночные ожидания в отношении еще более интерактивного и «более мягкого» характера роботов собак Айбо по сравнению с предлагаемыми моделями. Поэтому, мы уверенны, новая серия внесет значительный вклад в развитие нашего видения прогресса индустрии развлекательных роботов».
Роботы новой серии, как и пес AIBO второго поколения, имеют сенсоры прикосновений на голове и под лапами, а также новый дополнительный сенсор хвоста, которые обеспечивают все разнообразие ответов на контакт с хозяином. Новые модели имеют 15 степеней свободы (три – голова и по три на четыре лапы), гарантирующие плавность движений. Владелец имеет возможность формировать «личность» собаки, которая подстраивается под индивидуальность его поведения. Серия роботов AIBO LM обладает рядом новых возможностей для взаимодействия с владельцем. Например, на голове собаки вмонтированы цветные (красный, синий, зеленый) лампочки, которые позволяют собаке цветом выражать широкий спектр доступных ей эмоций.
Программное обеспечение – AIBO Life и AIBO Pal AIBO действует как полностью автономный робот, который принимает независимые решения относительно собственных действий и поведения благодаря программному обеспечению «AIBO Life», записанному на флэш-карту Memory Stick. «AIBO Life» обеспечивает роботу способность развиваться от младенчества до зрелости, осваивая новые виды поведения в результате взаимодействия с людьми и окружающей средой. Если же владелец не захочет тратить время на «выращивание» взрослой собаки из щенка, то программа «AIBO Pal» поможет сразу обрести компаньона, располагающего всеми возможностями, доступными данной модели.
Возможности «AIBO Life» / «AIBO Pal» Распознавание голоса: Словарь в 75 слов Запоминание и отклик на имя, данное владельцем Запоминание имени владельца
Система фотосъемки: Сохранение фотоизображения на Memory Stick по команде владельца Фотографирование по сигналу детектора движения (только для “AIBO Pal”)
Тональный язык: Мелодии AIBO: возможность управления тоном движениями руки Humming режим : возможность составить мелодию с AIBO Режим подражания: AIBO повторит ваши слова на тональном языке Взаимодействие с другим роботми AIBO (LM серии или AIBO 2-ого поколения [ERS-210])
Характеристики робота:
Компоненты:
Туловище, голова, хвост, 4 лапы (съёмные)
Память:
Memory Stick™ для AIBO
Движущиеся части:
Челюсть 1 степень свободы
Голова 3 степени свободы
Нога 3 степени свободы у каждой из 4х лап
Ухо 1 степень свободы у каждого из ушей
Хвост 2 степени свободы
Всего 20 степеней свободы
Ввод/вывод:
Разъём PC card Type2
Разъём Memory Stick™
Разъём питания
Видео вход:
CMOS матрица
Аудио вход:
Миниатюрные микрофоны
Аудио выход:
Миниатюрный громкоговоритель
ЖК дисплей:
Время, громкость, состояние батарей
Встроенные датчики:
Датчик температуры
ИК-датчик расстояния
Датчик ускорения
Сенсорные датчики (голова, спина, подбородок, лапы)
Датчик вибрации
Встроенные часы:
Дата и время
Расход энергии:
Примерно 9 Вт в стандартном автономном режиме
Время работы:
Примерно 1.5 ч. в стандартном автономном режиме
Размеры (ширина/высота/длина) 154/266/274 (без хвоста)
Вес Примерно 1.4 кг. (включая батареи и Memory Stick™)
Цвет Золотой, серебряный и чёрный
Аксессуары в комплекте:
Адаптер питания, LI-Ion батареи ERA-201B1, мячик, документация, и т.д.
Допустимая температура От 5 до 35 oC
Допустимая влажность От 10 до 80%
Видео AIBO-LM ERS-311
Робот-собака AIBO – ERS-220а

Реагирует на 75 команд по-английски, распознает свое имя, на голове имеется более 21 света диода которые мигают, как только можно говорит о своих ощущениях и чувствах.
Характеристики робота:
Процессор – 64Бит RISC (384 МГц)
Память – 32 Мб SDRAM
Устройства записи информации – Memory Stick для Aibo
Вход/Выход- PC Card Slot Type 2 In/Out, Memory Stick™ Media Slot In/Out, вход для энергии
Ввод изображения – CMOS сенсор (100K пикселей)
Аудио ввод – миниатюрный микрофон
Встроенные сенсоры – Сенсор температуры, IR сенсор дистанции, Сенсор ускорения, Сенсор чувствительности на ногах, лице, голове и др. , сенсор вибраций.
Время заряда батарей – 2 часа
LCD Дисплей – показывает время, дата, громкость, состояние батареи
В стандартную поставку входит – адаптер энергии, Lithium-ion батареи, Transfer Plug, розовый мяч, Инструкцию и др.
Размеры – 152?296x278mm (высота, ширина, длина)
Вес – приблизительно 1.5 Кг (включая батарею и Memory Stick™)
Цена – 2.297,00 €
Видео айбо ERS-220а
Игрушка робот AIBO ERS-7W

Краткое описание:
Окликните это милое существо – ушки вздрогнут и к вам повернется забавная мордочка, сияющая разноцветными огоньками. AIBO третьего поколения узнает хозяина в лицо и по голосу и всегда рад общению с ним.
А еще AIBO умеет самостоятельно утолять свой голод: почувствовав, что заряд снизился, песик найдет свою зарядную станцию (входит в комплект поставки) и усядется на нее, чтобы подкрепиться.
AIBO теперь понимает не только голосовые команды, но и визуальные. В коробке вы найдете набор карточек, каждая из которых соответствует определенной команде. Достаточно показать песику карточку, и он станцует или заведет свой внутренний будильник, чтобы разбудить вас в назначенное время.
У AIBO стало больше игрушек : к розовому мячику, с которым он по-прежнему с удовольствием играет, прибавилась косточка – ее AIBO умеет брать в пасть.
Новый АIBO сохранит свою индивидуальность на протяжении жизни. Это стало возможным благодаря встроенной памяти, объем которой удвоился по сравнению с предыдущими моделями. Новое программное обеспечение поставляется вместе с собачкой и объединяет несколько AIBO-приложений в одной 32-мегабайтной карте памяти Memory Stick.
Характеристики робота:
Число степеней свободы 20
Окрас жемчужно-белый
Кол-во сенсоров 7
Габариты, мм 180 x 278 x 319
Вес, кг 1.60
Видео игрушки AIBO ERS-7W
Собака робот AIBO ERS-7M3

Краткое описание:
Модель ERS-7M3 обладат словарем в одну тысячу слов, которая, по словам представителя Sony, позволит ей вести простой диалог с пользователем: приветствовать хозяина, когда он входит в дом, спрашивать, как прошел день, и даже рассказывать о том, чем занимался сам робот. Голос, установленный по умолчанию, немного напоминает детский, однако с помощью программного обеспечения Sony Entertainment Player пользователь сможет программировать возраст и пол голоса собаки. Модель ERS-7M3 также первая модель робота компании, которая говорит по-испански робот будет реагировать на 35 команд, произнесенных на испанском языке
Характеристики робота пса:





 купить по привлекательной цене 46990 руб. в Москве")