

- Описание задачи финала
- Основные возможности радиоаппаратуры
- Coex pix
- Coex клевер 4 code — конструктор программируемого квадрокоптера
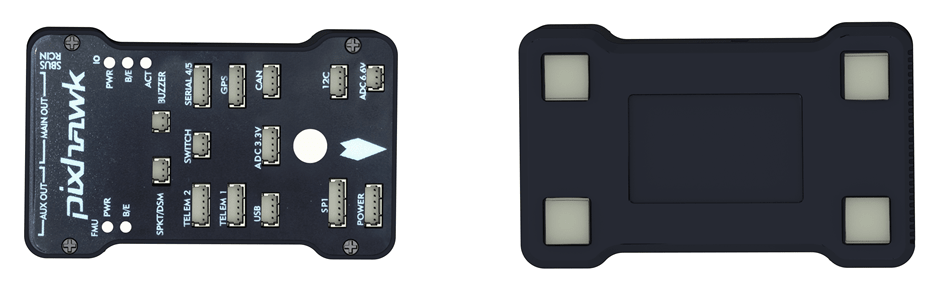
- Pixracer
- Автономный полет
- Безопасность в полете
- Безопасность перед вылетом
- Безопасность при подготовке к вылету
- Безопасность при работе с li-ion аккумуляторами 18650
- Безопасность при сборке и настройке
- Включение
- Включение радиопульта
- Включение, выключение моторов, изменение режимов
- Воздушная подушка и управление в ней
- Дополнительные настройки
- Залудить контактные площадки платы питания
- Крепежные элементы
- Минимальные требования к устройству
- Монтаж arduino и радиоприемника flysky
- Монтаж raspberry
- Монтаж и подключение полетного контроллера pixracer
- Монтаж камеры rpi
- Монтаж преобразователя напряжения bec (припаять и проверить)
- Монтаж радиоприемника
- Монтаж элементов
- Настройка полетного контроллера
- Оборудование
- Отправка сообщений
- Пайка
- Перевод пульта в режим ppm
- Перевод пульта в режим pwm
- Подготовка платы распределения питания
- Подключение светодиодной ленты к raspberry pi
- Полетные режимы
- Предпаячная проверка
- Предполетные проверки
- Проверка
- Проверка направления вращения моторов
- Программная часть
- Работа с led-лентой через ros
- Работа с газом
- Работа с клевером
- Работа с креном и тангажом
- Работа с рысканьем
- Работа с светодиодной лентой
- Сборка
- Сборка рамы
- Свободный полет
- Сопряжение приемника и пульта
- Сопряжение приёмника и пульта
- Состав конструктора
- Состояния готовности к полету
- Установка esc и pdb
- Установка led ленты и ножек
- Установка raspberry pi
- Установка акб
- Установка защиты
- Установка моторов
- Установка полетного контроллера
- Установка полетного контроллера pixhawk
- Установка пропеллеров и акб
- Установка пропеллеров и подготовка к полёту
- Установка светодиодной ленты на обруч
- Функционал радиопульта flysky i6
Описание задачи финала
Глобальные эпидемии всегда застают человечество врасплох, и заставляют менять привычный образ жизни. Но в этот раз на борьбу с распространением вируса встали современные технологии! На фоне эпидемии в Китае начали использовать дроны, которые патрулируют улицы и отчитывают прохожих, которые гуляют, не надевая защитную маску, а также повсеместно доставляют медикаменты.
Пока тесты на наличие вируса только начинают массово распространяться, а вакцина от вируса находится в разработке – самое время задуматься о том, как быстро и безопасно производить распространение вакцины. Помочь в этом смогут, конечно же, дроны.
Своевременное выявление вируса у жителей планеты и вакцинация позволит спасти тысячи жизней. Так, на финале участникам предлагается проработать решение для БПЛА и используя БПЛА. Используя БПЛА, разработать решение для следующих задач:
- Получение данных о наличии людей на улицах (камеры в общественных местах позволяют определить места массового скопления людей, а сервер передать БПЛА координаты мест, где они находятся).
- Выявление заболевших среди прохожих. Определение людей с повышенной температурой (зависит от цвета объекта расположенного под коптером, это зелёный, жёлтый или красный цвет). Обеспечение заболевших людей экспресс-тестами.
- Обработка информации, собранной в пункте 2.
- Сбор результатов экспресс-теста (для этого мы используем QR-коды) на наличие вируса и возвращение БПЛА на точку взлета.
Основные возможности радиоаппаратуры
Прежде чем запускать ваш коптер, необходимо разобраться, как работает пульт радиоуправления (“аппаратура” в общепринятой терминологии авиамоделизма).
Управление дроном происходит с помощью двух стиков на аппаратуре. По умолчанию левый стик отвечает за газ и рысканье, а правый за крен и тангаж. Данные термины используются для всех летательных судов, от самолетов до квадрокоптеров.
- Газ (throttle) – отвечает за скорость вращения двигателей.
- Рысканье (yaw) – отвечает за повороты вокруг вертикальной оси (Z), по часовой (при наклоне вправо) и против часовой (при наклоне влево) стрелки.
- Тангаж (pitch) – отвечает за наклон или движение вперёд/назад.
- Крен (roll) – отвечает за наклон или движение влево/вправо.
Данные описания предполагают, что коптер находится задней частью к пилоту.
Coex pix
Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Закрепите плату распределения питания с помощью нейлоновых гаек, сверху установите демпферные стойки.
Установите полетный контроллер и закрепите нейлоновыми гайками.
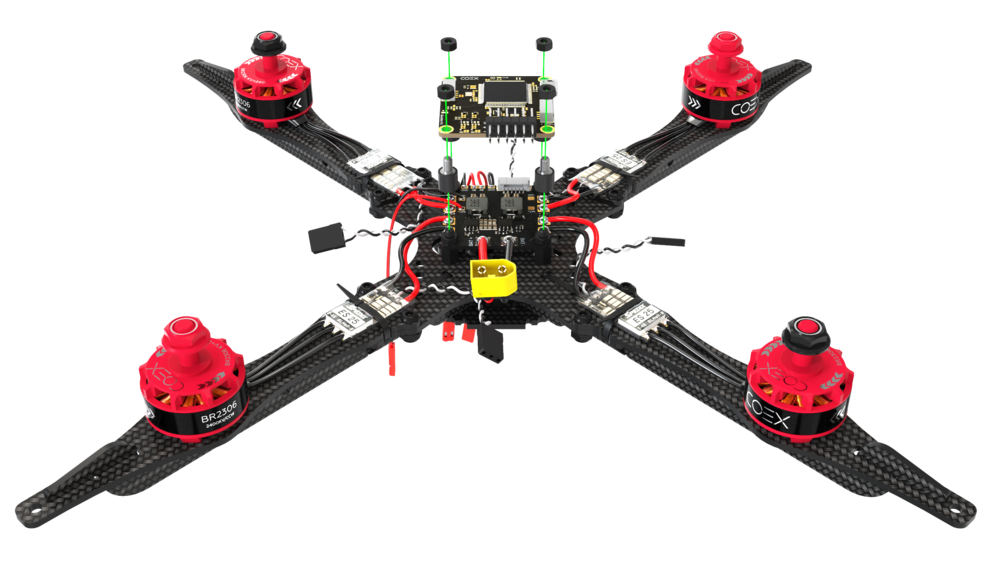
Вставьте флеш-карту для записи логов в полетный контроллер.
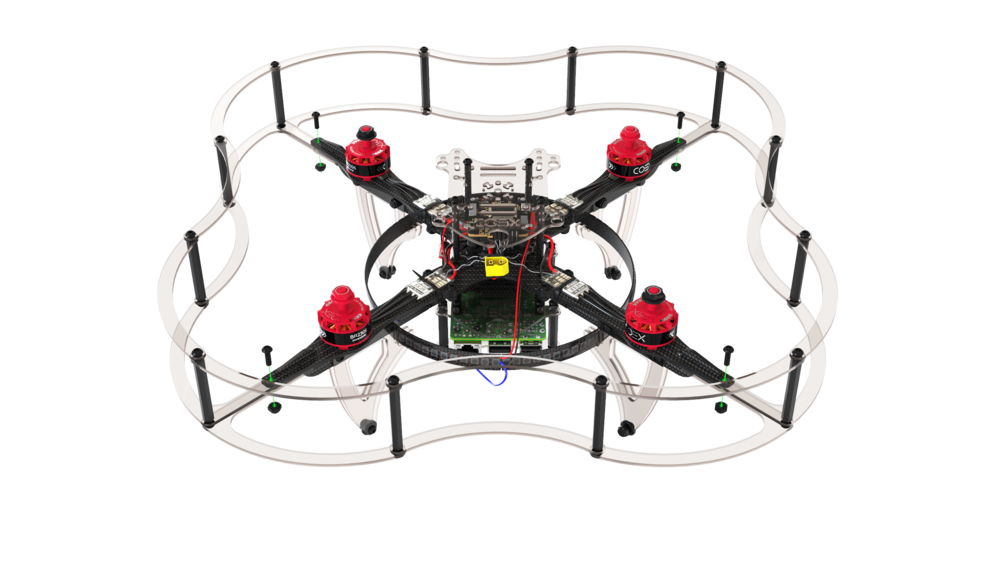
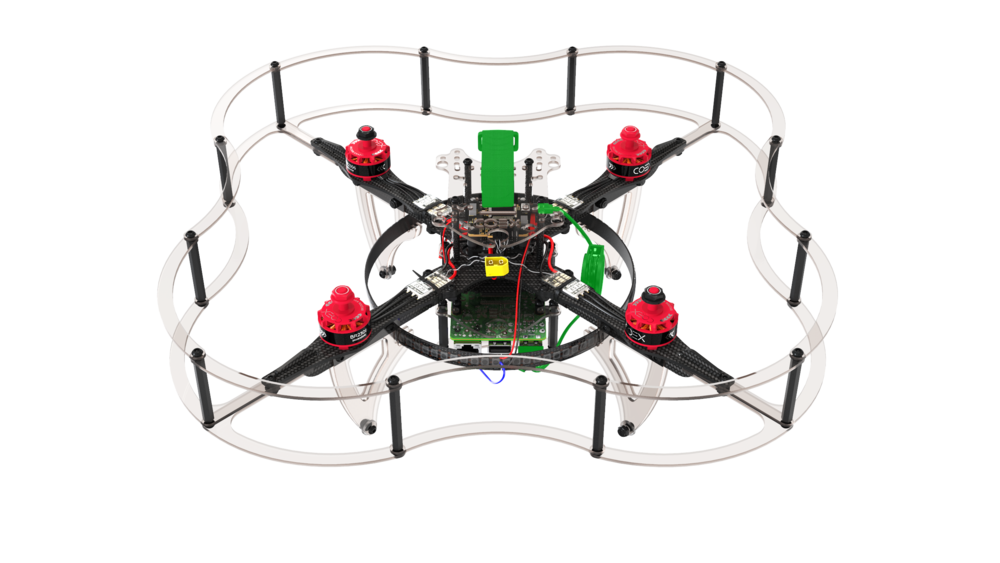
Coex клевер 4 code — конструктор программируемого квадрокоптера
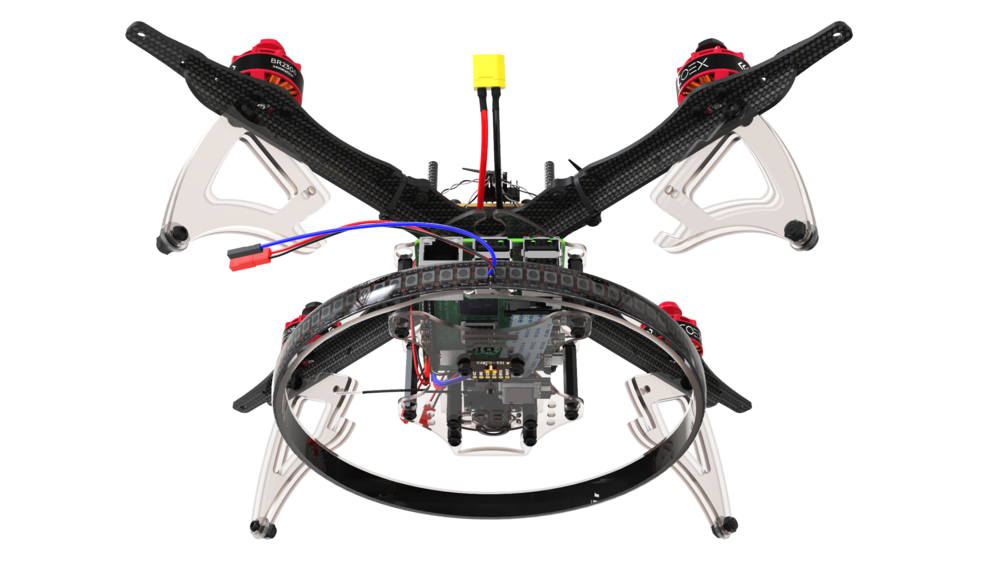
Карбоновая рама, защита опор, мощные бесколлекторные двигатели, полетник PX4, Raspberry Pi 4, программируемая светодиодная полоса, камера машинного зрения, лазерный дальномер, навигация в помещении, аккумулятор с увеличенной емкостью.
Данный конструктор был разработан для учеников старших классов и студентов университетов, а также для всех, кто занимается исследовательскими проектами, участвует в соревнованиях, олимпиадах и хакатонах.
Не упустите возможность развить новые навыки:
• Моделирование – создание 3D-моделей дронов и полезных нагрузок.
• Сборка – развитие мелкой моторики, работа с электроникой.
• Пилотирование – управление дроном с помощью пульта дистанционного управления и камеры.
• Программирование –Scratch, Python и
С кодирование с использованием системы Linux.
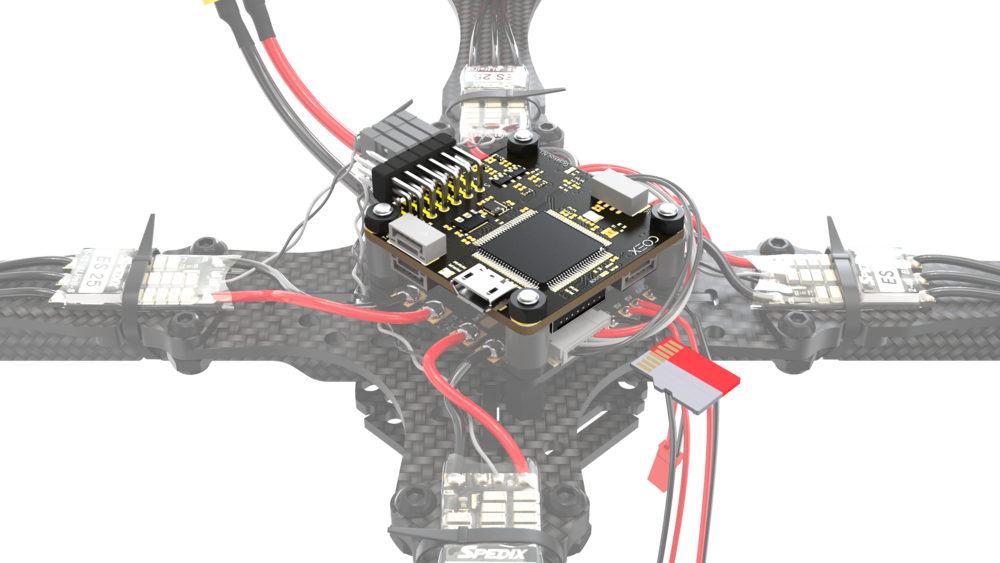
Pixracer
Закрепите плату распределения питания с помощью нейлоновых стоек 6мм.
Установите малую крепежную деку и закрепите ее с помощью нейлоновых гаек.
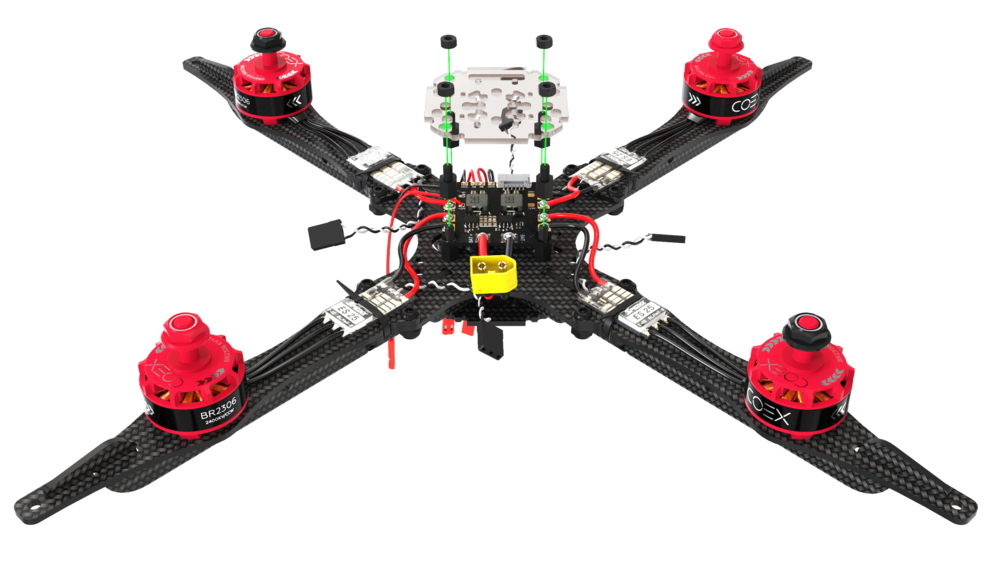
Склейте 3–4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху Pixracer.
Вставьте флеш-карту для записи логов в полетный контроллер.

Автономный полет
Автономный полет возможен с использованием модуля simple_offboard.
Пример взлета на высоту 1.5 м и удержание позиции:
navigate(z=1.5, frame_id='body', auto_arm=True)
Полет вперед на 1 м:
navigate(x=1, frame_id='body')
Полет назад на 1 м (относительно предыдущей целевой точки):
navigate(x=-1, frame_id='navigate_target')
При использовании Optical Flow возможна также навигация по ArUco-маркерам, в том числе используя VPE.
Безопасность в полете
- Выполнять все указания преподавателя или лётного инструктора.
- Заранее обозначить зону пилотажа. Летать только в обозначенной зоне и не допускать вылета за её пределы. Не залетать за собственную спину.
- При обучении полётам летать на уровне ниже собственного роста.
- Летать рядом с собой на расстоянии, на котором вам видна ориентация коптера в пространстве. Не улетать далеко от себя. В случае сомнений в ориентации коптера немедленно выполнить посадку на месте. Не пытаться взлететь. Подойти ближе к коптеру и выполнить взлёт.
- При управлении все движения стиками выполнять аккуратно и плавно. Не допускать резких движений. При необходимости изменить направление полёта двигать стиками следует энергично, но не резко.
- Летать следует осторожно и выполнять только те элементы, в которых нет сомнений. Запрещается выполнять фигуры пилотажа, в успехе которых возникают сомнения и фигуры, связанные с риском.
- Соблюдать скоростной режим. Скорость полёта коптера держать в пределах скорости идущего человека.
- Вернуть коптер к месту посадки к рассчитанному времени, не допускать полной разрядки аккумулятора в полёте.
- Посадку выполнять только на ровную открытую площадку вдали от препятствий.
Безопасность перед вылетом
- Располагать зрителей за спиной пилота или за линией, проходящей через оба плеча пилота за спиной пилота.
- Не допускать выхода зрителей в полусферу перед лицом пилота.
- Знать и помнить время полёта, на которое рассчитан данный коптер и его аккумулятор.
- ДО подключения Li-ion аккумулятора включить аппаратуру управления (пульт), перевести левый стик (газ) в нулевое положение.
- Подключать Li-ion аккумулятор только перед взлётом, отключать сразу после взлёта.
- Стоять на расстоянии не менее 3 м от коптера.
- Взлетать с земли с ровной площадки, на расстоянии не менее 3 метров от препятствий.
Безопасность при подготовке к вылету
- Убедиться, что Li-ion аккумуляторы заряжены.
- Убедиться, что батарейки в аппаратуре управления заряжены.
- Устанавливать пропеллеры только перед вылетом.
Проверить надёжность следующих узлов:
- Затянутость гаек пропеллеров.
- Крепление и целостность защит винтов.
- Надежность крепления проводов, отсутствие болтающихся проводов.
Безопасность при работе с li-ion аккумуляторами 18650
- Обращаться с аккумуляторами бережно. Не допускать падений, ударов деформаций.
- При подключении (отключении) аккумуляторов держаться только за разъёмы, тянуть или дергать за провода запрещается.
- В случае обрыва разъемов, обнаружения нарушений целостности изоляции или корпуса аккумулятора, не трогая его, немедленно сообщить преподавателю.
См. статью техника безопасности при пайке и лётной эксплуатации коптеров.
Безопасность при сборке и настройке
- Снять пропеллеры.“Все наземные операции производить со снятыми пропеллерами. Устанавливать пропеллеры на моторы только перед полётом.”
- Отключить аккумулятор. Держать питание выключенным. “Сборку, настройку и ремонт производить с отключенным питанием. Подключать питание только для тестирования электронных компонентов коптера. После тестирования перед другими работами питание сразу отключить.”
- Позвать на помощь. “Если при выполнении работ возникли какие-либо проблемы, необходимо обратиться к преподавателю или учителю, а не пытаться решить проблему самостоятельно.”
Включение
Для работы Optical Flow необходим подключенный и настроенный лазерный дальномер.
Включите Optical Flow в файле ~/catkin_ws/src/clover/clover/launch/clover.launch:
Optical Flow публикует данные в топик /mavros/px4flow/raw/send. Кроме того, в топик /optical_flow/debug публикуется визуализация, которую можно просмотреть с помощью web_video_server.
Для правильной работы модуль камеры должен быть корректно подключен и сконфигурирован.
Включение радиопульта
- Вставить джампер в B/VCC радиоприемника (замкнуть “землю” и “сигнал”)
- На пульте зажать кнопку BIND KEY.
- Включить пульт (перещелкнуть POWER, BIND KEY не отпускаем).
- Подключить аккумулятор к коптеру.
- Ждем синхронизацию.
- Отсоединить джампер.
- Светодиод горит непрерывно.
Мануал по неисправностям радиоаппаратуры
Включение, выключение моторов, изменение режимов
Для удобства подключитесь к коптеру с помощью QGC через Wi-Fi и включите звук. Это позволит наблюдать за изменением полетных режимов. Если не имеется возможности подключиться через Wi-Fi, для проверки полетных режимов подключитесь по USB.
Убедитесь, что настроили полетные режимы на один из тумблеров. Для этого переключите тумблер, в разные позиции и убедитесь, что режимы изменяются.
Рекомендуется настроить Kill Switch. Для его проверки совершите следующие действия:
- Включите Kill Switch, проверьте, что в QGC появилось соответствующее уведомление.
- Переведите коптер в состояние Armed, а затем включите Kill Switch. Убедитесь, что моторы выключились. Затем переключите тумблер Kill Switch в изначальное положение. Если коптер автоматически не перешел в состояние Disarmed из-за бездействия, моторы снова начнут вращаться.
Переводите коптер в состояние Armed только на полетной зоне.
Убедитесь, что режимы переключаются удобными для вас тумблерами. В противном случае измените их в соответствии со статьей по настройке полетных режимов. Повторите приведенные действия несколько раз, для того, чтобы запомнить какие тумблеры за что отвечают.
Воздушная подушка и управление в ней
Понятие воздушной подушки очень важно во всей летательной технике. Сама по себе воздушная подушка является зоной повышенного давления, возникающая за счет воздуха пропускаемого через пропеллеры. Данная область характеризуется турбулентностями и воздушными потоками влияющими на полет коптера.
Пилоты стараются избегать полетов в воздушной подушке, но на ее границе имеется стабильная область, в которой коптер может зависнуть при минимальном значении газа. В таком случае создается ощущение, что коптер “сел” на воздушную подушку.
Главная особенность и преимущество такого полета заключается в том, что коптер не будет изменять высоту при одном значении газа.
Основные задания:
- Стабилизация коптера на одном месте.
- Полет по квадрату.
- Полет по кругу.
Аналогично с предыдущими упражнениями перед взлетом выполните следующие действия.
Упражнение №1. Поднимайте стик газа, пока коптер не пролетит воздушную подушку и не окажется над ней (высота от пола ~25-30 см, для коптера Клевер 4). Коптер не должен подниматься вверх или проваливаться вниз, высота полета должна стабилизироваться.
Упражнение №2. Поднимите коптер на воздушную подушку и стабилизируйте его в одной точке. Далее пролетите по квадрату со стороной 1 м сначала по часовой стрелке, потом против часовой стрелки. Повторите траекторию в каждую сторону 2-3 раза.
Упражнение №3. Поднимите коптер на воздушную подушку и стабилизируйте его в одной точке. Попробуйте описать коптером круг с диаметром 1 м, по часовой и против часовой стрелки. Повторите траекторию в каждую сторону 2-3 раза.
Дополнительные настройки
Если коптер нестабильно удерживает позицию, попробуйте увеличить коэффициенты P PID-регулятора по скорости – параметры MPC_XY_VEL_P и MPC_Z_VEL_P.
Если коптер нестабильно удерживает высоту, попробуйте увеличить коэффициент MPC_Z_VEL_P или лучше подобрать газ висения – MPC_THR_HOVER.
Если коптер уплывает по рысканью, попробуйте:
- перекалибровать гироскопы;
- перекалибровать магнитометр;
- попробовать разные значения параметра
EKF2_MAG_TYPE, который определяет, каким образом данные с магнитометра используются в EKF2; - изменять значения параметров
EKF2_MAG_NOISE,EKF2_GYR_NOISE,EKF2_GYR_B_NOISE.
Для более хороших результатов выполняйте перекалибровку гироскопов непосредственно перед взлетом, используя соответствующий сниппет.
Если коптер уплывает по высоте, попробуйте:
- повысить значение коэффициента
MPC_Z_VEL_P; - изменить значение параметра
MPC_THR_HOVER; - выставить
MPC_ALT_MODE= 2 (Terrain following).
При использовании Optical Flow максимальная горизонтальная скорость дополнительно ограничивается. За это косвенно отвечает параметр SENS_FLOW_MAXR (максимальная достоверная “угловая скорость” оптического потока). При нормальном полёте горизонтальная скорость будет регулироваться так, чтобы показания Optical Flow не превышали 50% значения данного параметра.
Залудить контактные площадки платы питания
- Залудить* контактные площадки платы питания.
- С помощью мультиметра проверить отсутствие контактного замыкания на плате (прозвонить)
Чтобы припой аккуратно заполнил всю площадку, необходимо её прогреть. Для этого нужно удерживать жало паяльника на контактной площадке в течение 2 сек (или больше, если потребуется)
Крепежные элементы
- Пластиковые стойки 6 мм x28.
- Пластиковые стойки 30 мм x32.
- Винты М3×8 x48.
- Винты М3×12 x24.
- Винты М3×16 x40.
- Гайки Пластиковые x8.
- Гайки Металлические x48.
- Наклейки для отсека АКБ х8 .
- Термоусадка ф15 , .50 см
- Термоусадка ф5, 100 см
- Двухсторонний скотч 3M x16.
- Отвертка x1 (нужна визуализация)
- Изоляционная лента х1
- Ножницы канцелярские х1
- Ремешок для батареи 250 мм х1
Минимальные требования к устройству
- Модульность;
- возможность изготовления посредством 3D печати;
- возможность осуществления сборки устройства посредством винтового/шпоночного соединения;
- способность вмещать/захватывать груз 10x10x10 см., весом не менее 200 г.;
- возможность транспортировки хрупкого груза при помощи данного устройства;
- возможность реализации бесконтактной доставки груза, не нарушая его целостности, при помощи данного устройства;
- совместимость с программируемым квадрокоптером “COEX Клевер 4 Code”;
- возможность монтажа на нижнюю деку.
Монтаж arduino и радиоприемника flysky
- Произвести монтаж пинов микроконтроллера Arduino Nano, используя пайку.
- Установить микроконтроллер в специальной маунт и прикрепите к нижней деке, используя винты М3х16 (4 шт.).
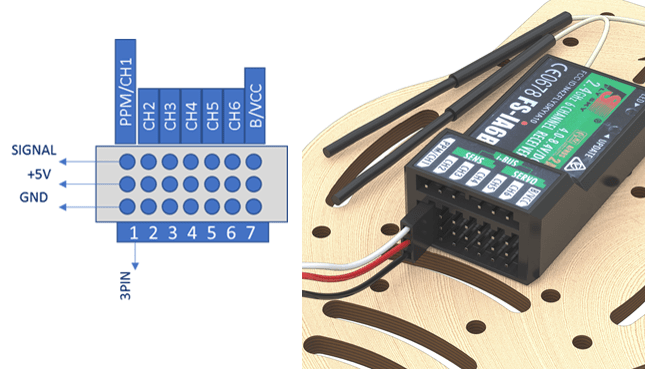
- Используя двухсторонний скотч, прикрепить приемник, как показано на рисунке.
Подключить шлейф радиоприемника от Pixracer как на рисунке.
белый -> PPM красный -> 5V черный -> GND оранжевый, зеленый -> не используются. Выньте эти провода из разъёма или обрежьте их.
Монтаж raspberry
Перевернуть коптер.
Установить Raspberry на стойки, используя монтажные отверстия Raspberry.
USB-разъемы направлены к хвостовой части коптера.
Установка шлейфа для камеры:
- поднять защелку;
- подключить шлейф;
- закрыть защелку.
Подключение питания Raspberry:
5В -> pin 04 (DC power 5v) GND -> pin 06 (Ground) Подключение светодиодной ленты pin 40 (GPIO21)Сборка маунта для камеры RPi.
Используйте винт М3х16 и гайку М3
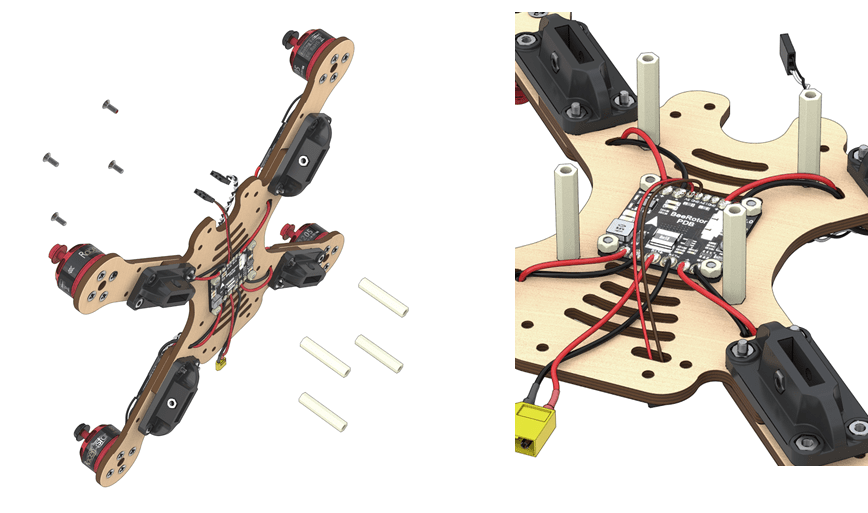
Монтаж и подключение полетного контроллера pixracer
Установить Полетный контроллер Pixracer на двухсторонний скотч 3М (2-3 слоя).
Также полетный контроллер можно извлечь из корпуса и жестко установить на стойке М3х6.Установить стойки 40 мм, используя винты М3х8.
Подключить разъем POWER.
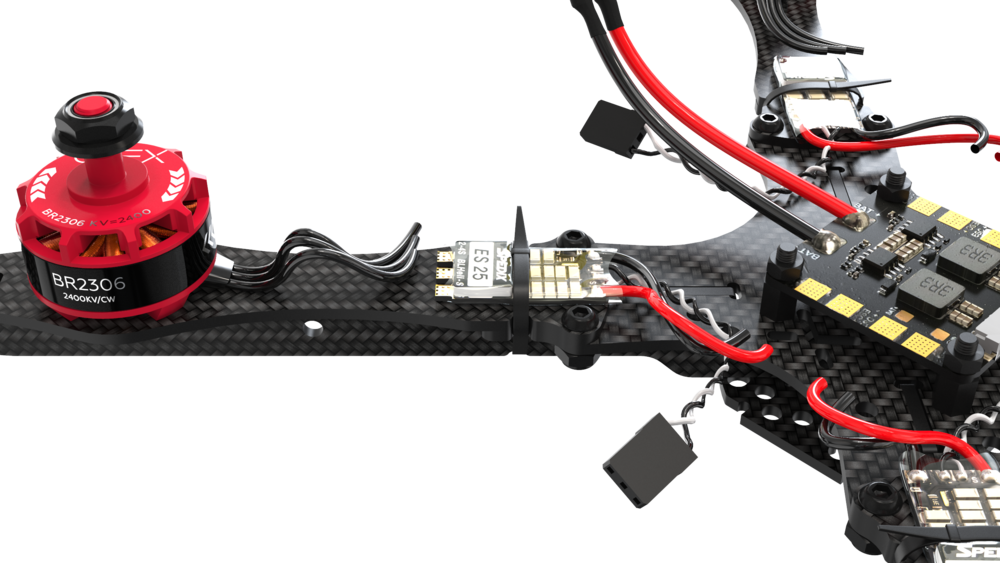
Подключить регуляторы, как на картинке.
Подробно про подключение регуляторов 4в1.
Подключить шлейф радиоприемника в разъем RCIN в Pixracer.
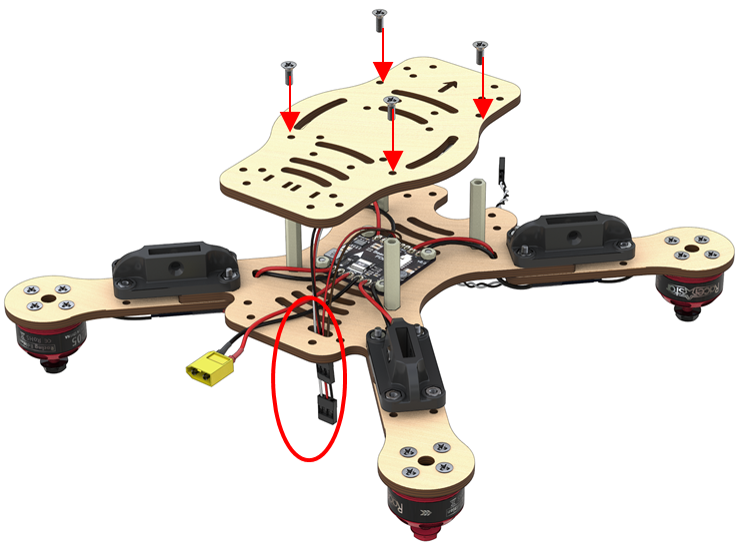
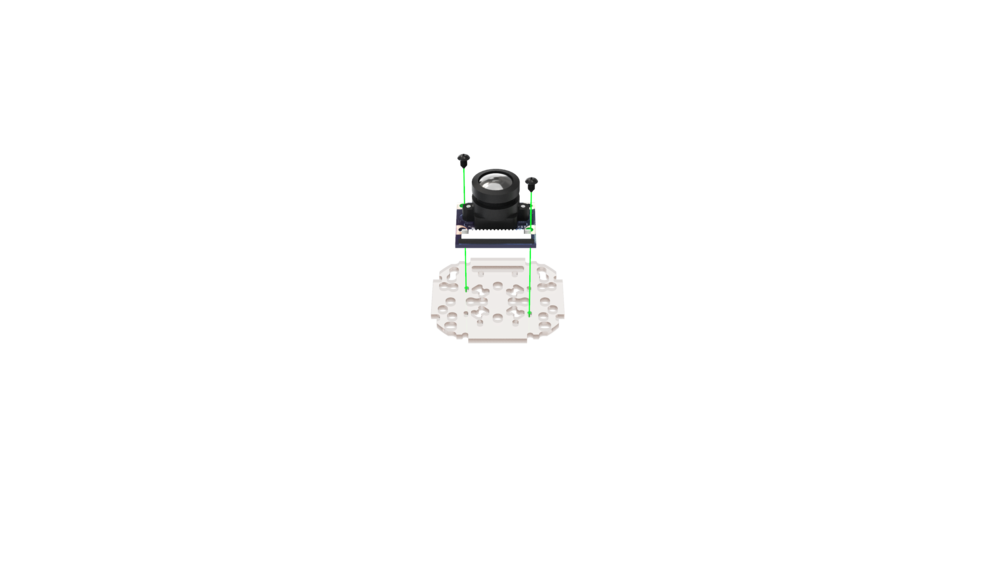
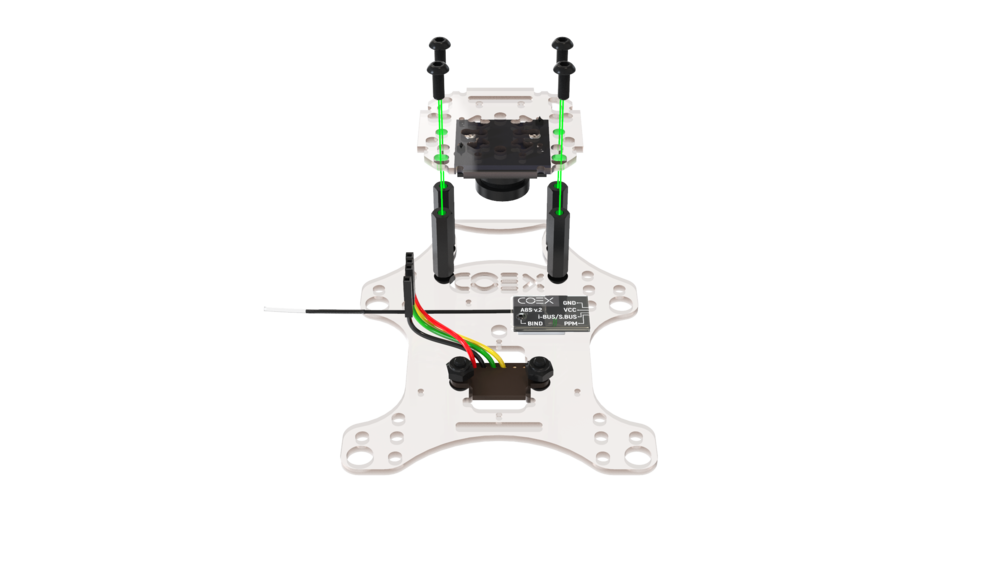
Монтаж камеры rpi
- Установить маунт для камеры RPi в сборе на нижнюю деку винтами М3х12 (2 шт.).
- Подключить шлейф к камере RPi.
- Установить камеру в маунт, закрепить саморезами М2.
Закрепить Raspberry стойками 30 мм (4 шт.).
Установить нижнюю деку в сборе на стойки винтами М3х8 (4шт.)
Установить ножки в маунты (4 шт.).
Монтаж преобразователя напряжения bec (припаять и проверить)
- Распаковать плату питания и установить шлейф питания.
- Включить мультиметр в режим измерения постоянного напряжения (диапазон 20В или 200В).
- Проверить работоспособность платы питания, подключив АКБ
- Выходное напряжение на разъеме XT30 должно равняться напряжению на АКБ (от 10В до 12.6В).
- Выходное напряжение на шлейфе питания должно быть в пределах 4.9В до 5.3В.
- Измеряем между черным и красным проводами.
- Распаковывать преобразователь напряжения и снимаем прозрачную изоляцию.
Припаять два дополнительных провода на BEC
Проверить работу BEC.
Припаять BEC на плату питания:
ЧЕРНЫЙ -> - КРАСНЫЙ ->Подключить АКБ и проверяем напряжение на припаянных проводах к BEC (из пункта 5).
5В – все правильно!
больше 10В – отключите питание и переставьте желтую перемычку на другой пинцет.
0В – плохо спаяли.
- Если BEC выдает 5В, то изолируем паячное соединение черной термоусадкой.
Монтаж светодиодной ленты.
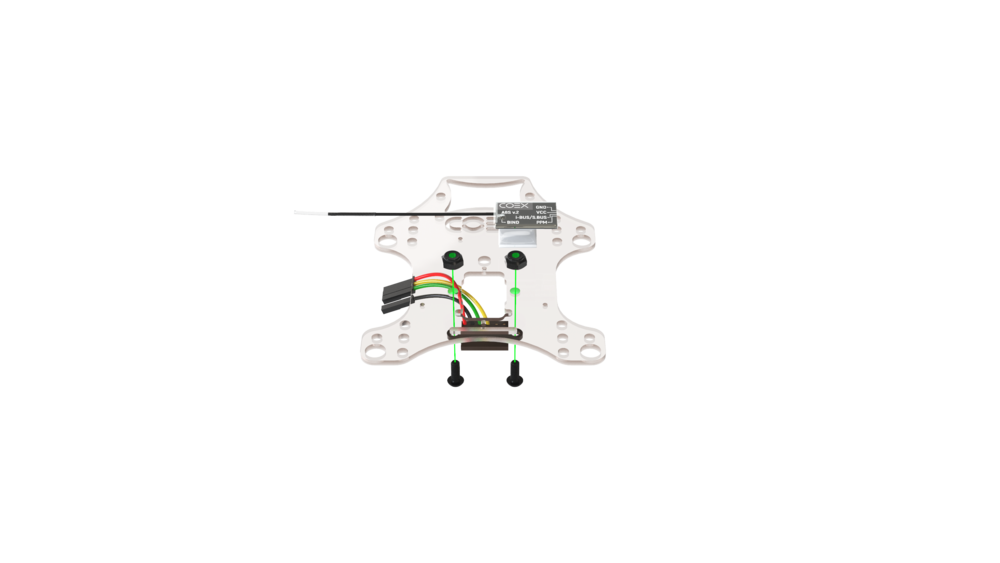
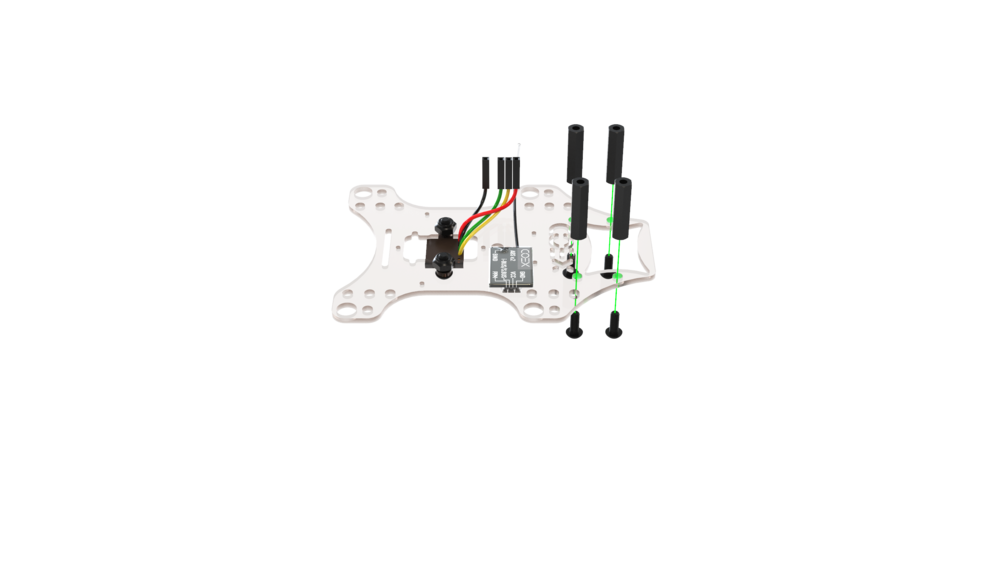
Монтаж радиоприемника
- Установить пластиковые стойки 30 мм на раму винтами М3х8.
- Разъем питания 5В продеть в прорезь.
- Приемник прикрепить к нижней дополнительной раме, используя двухсторонний скотч и ориентируясь на гравировку. Антенны направлены вперед.
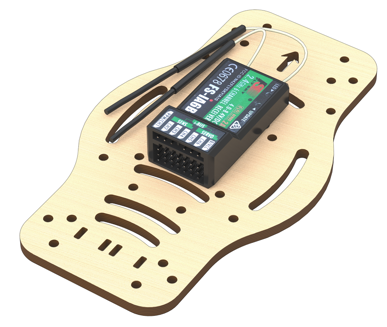
- Установить 3х проводной шлейф в канал PPM / CH1.
- Продеть в прорезь к разъему 5 В.
- Прикрутить нижнюю дополнительную раму к стойкам на центральной раме винтами М3х8.
Направление стрелок на плате питания и на дополнительной раме совпадают
Монтаж элементов
- Установить гайки в пластиковые держатели.
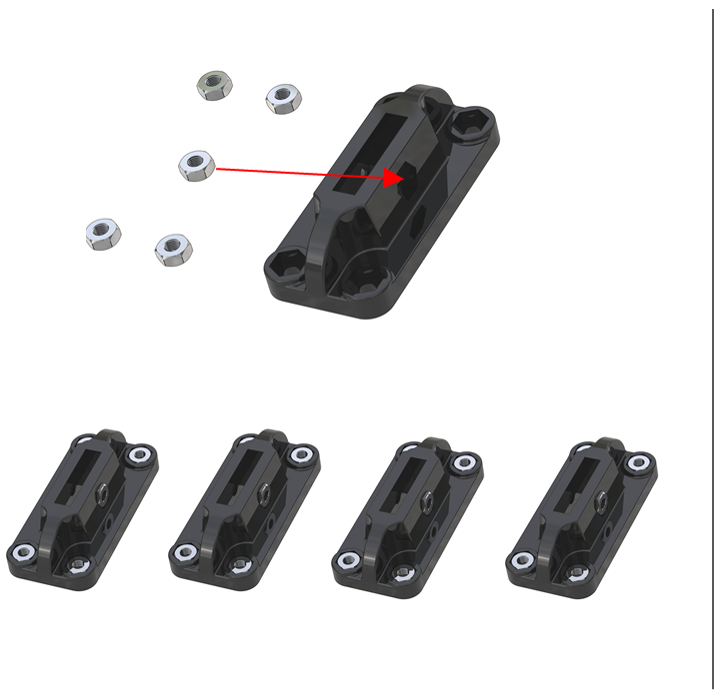
- Установить лучи на раму винтами М3х16
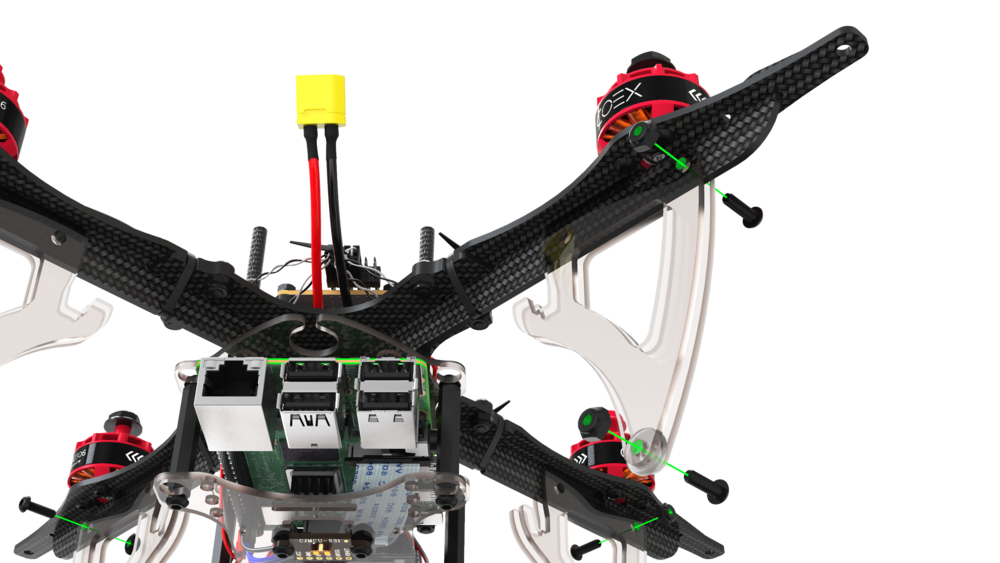
- Расположение моторов. Проверить расположение моторов (моторы с черной гайкой в левом верхнем углу и в правом нижнем).
- Продеть силовые провода регуляторов в отверстия.
Настройка полетного контроллера
При использовании сборки PX4 для Клевера необходимые параметры PX4 применятся автоматически.
При использовании LPE (параметр SYS_MC_EST_GROUP = local_position_estimator, attitude_estimator_q):
При использовании EKF2 (параметр SYS_MC_EST_GROUP = ekf2):
Для проверки правильности всех настроек можно воспользоваться утилитой selfcheck.py.
Оборудование
- Лента тканевая ширина 18мм.
Примечание- можно использовать любой кусок ткани порезанный на полоски толщиной в 18мм.
Длина – 30см. - Штифт и крышка для него.
Количество – 8шт. - Монолитный поликарбонат прозрачный.
размер листа – 200 мм × 200 мм × 6 мм - Поролон толщиной 10мм.
Примечание – можно просто обрезать бытовую губку по нужным размерам. - Сервоприводы Feetech FS90R 360 degrees.
Количество – 2шт. - Демпфер 17.5x7x20mm.
Количество – 10шт.
Отправка сообщений
Для отправки сообщений можно использовать метод publish клиента:
import paho.mqtt.client as mqtt
client.publish(topic='/xxx', payload='connected')
Данный код опубликует сообщение connected в топик /xxx.
Пайка
Работы, связанные с пайкой и лужением, должны проводиться в специально оборудованных и предварительно подготовленных помещениях. Обязательно должна присутствовать система вентиляции.
Перед началом работы необходимо:
- Привести в порядок рабочее место, ничего не должно мешать процессу. Рабочее место должно быть хорошо освещено.
- Проверить целостность проводки и штепсельной вилки.
- Паяльник, находящийся в рабочем состоянии, установить в зоне действия местной вытяжной вентиляции, в специальную подставку.
- Перед началом работы надеть защитный халат, очки и, при необходимости, перчатки.
Во время пайки:
Паяльник следует держать только за ручку, так как жало имеет высокую температуру.

Жало паяльника нагревается до очень высокой температуры, поэтому, в случае его прикосновения к электрическому проводу в ходе пайки изоляция будет повреждена в считанные мгновения, с последующим коротким замыканием.
- Для перемещения изделий применять специальные инструменты (пинцеты, клещи или другие инструменты), обеспечивающие безопасность при пайке.
- Во избежание ожогов расплавленным припоем при распайке не выдергивать резко с большим усилием паяемые провода.
При пайке мелких и подвижных изделий пользоваться специальным держателем.

Паяльник переносить за корпус, а не за провод или рабочую часть. При перерывах в работе паяльник отключать от электросети.
При обнаружении неисправной работы паяльника или возникновении возгорания отключить его от питающей электросети.
Канифоль и припой при плавлении выделяют значительное количество вредных веществ. Настойчиво советуется проветривать помещение после каждой пайки. Через каждые 30 минут нужно делать небольшие перерывы со сквозным проветриванием помещения и не забывать при этом отключать паяльник.
Перевод пульта в режим ppm
Полётный контроллер не может работать с пультом в режиме PWM, поэтому следует произвести перевод пульта в режим PPM.
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку “ОК”.
- Кнопками Up/Down выбираем меню “System setup”, кнопкой “ОК” подтвердите выбор.
- Выберите “RX Setup”.
- Выберите “Output mode”.
- Убедитесь, что в открывшемся меню выбран пункт “PPM”.
- Чтобы сохранить настройки, удерживайте нажатой кнопку “Cancel”.
Перевод пульта в режим pwm
Включите пульт с помощью слайдера POWER. Если пульт заблокирован, необходимо перевести все стики в начальное положение:
- Левый стик в центральной нижней позиции.
- Правый стик в центре.
Переключатели A, B, C, D в положение “от себя”.

Убедитесь, что PPM в меню RX Setup отключен:
- Убедитесь, что питание дрона выключено.
- Для входа в меню удерживайте нажатой кнопку “ОК”.
- Кнопками Up/Down выбираем меню “System setup”, кнопкой “ОК” подтвердите выбор.
- Выберите “RX Setup”.
- Выберите “Output mode”.
- Убедитесь, что в открывшемся меню выбран пункт “PWM”.
- Чтобы сохранить настройки, удерживайте нажатой кнопку “Cancel”.
Подготовка платы распределения питания
- Залудите контактные площадки платы питания.
- С помощью мультиметра проверьте отсутствие короткого замыкания (прозвонить):
- Установите мультиметр в режим прозвонки.
- Проверьте работу мультиметра путем замыкания щупов между собой. При корректной работе прибор издаст характерный звук.
- Попарно один щуп прикладывается к контакту « », а второй к «-»/GND. Если в цепи есть короткое замыкание, издается звук.
Подключение светодиодной ленты к raspberry pi
Питание для ленты берется от второго BEC. Подключите контакты «-» и « » к Ground и 5v на ленте соответственно.
Подключите контакт D к GPIO-пину на Raspberry. Рекомендуется использовать пин GPIO21.
Полетные режимы
Ручное полет с использованием полетного контроллера PX4 может происходит с использованием разных полетных режимов, которые определяют назначения стиков радиопульта и другие характеристики полета. Полный список полетных режимов приведен в статье “Полетные режимы”.
Основные ручные режимы разобраны далее.
STABILIZED – режим стабилизации горизонтального положения. В данном режиме коптер будет удерживать горизонт, если им не управлять. Назначение стиков:
- Газ – усредненная скорость вращения моторов.
- Рысканье – угловая скорость вокруг вертикальной оси.
- Тангаж – угол наклона вокруг поперечной оси (вперед/назад).
- Крен – угол наклон вокруг продольной оси (влево/вправо).
POSCTL – режим удержания позиции (требуется включенная система позиционирования). Назначение стиков:
- Газ – вертикальная скорость полета.
- Рысканье – угловая скорость вокруг вертикальной оси.
- Тангаж – линейная скорость полета дрона (вперед/назад).
- Крен – линейная скорость полета дрона (влево/вправо).
ACRO – режим управление средней скоростью вращения моторов и угловыми скоростями дрона. Этот режим является наиболее сложным для пилотирования и чаще всего применяется дрон-рейсерами и в шоу 3D-пилотирования для выполнения трюков. Назначение стиков:
- Газ – усредненная скорость вращения моторов.
- Рысканье – угловая скорость вокруг вертикальной оси.
- Тангаж – угловая скорость вокруг поперечной оси (вперед/назад).
- Крен – угловая скорость вокруг продольной оси (влево/вправо).
В других полетных контроллерах аналогичные полетные режимы могут называться по-другому.
Предпаячная проверка
Статья про прозвонку
Прозвонить следующие цепи на НЕЗАМКНУТОСТЬ (отсутствие звукового сигнала мультиметра):
- “BAT ” и “BAT-”
- “12V” и “GND”
- “5V” и “GND”
Прозвонить следующие цепи на ЗАМКНУТОСТЬ (появление звукового сигнала мультиметра):
- “BAT-” c каждым контактом, обозначенным “-” и “GND”
- “BAT ”, с каждым контактом, обозначенным “ ”
Предполетные проверки
Перед взлетом выполняйте следующие действия:
- Проверьте целостность коптера и возможность вращения пропеллеров.
- Убедитесь, что коптер находится задней частью к вам.
- Включите коптер путем подключения АКБ.
- Отойдите на безопасное расстояние. Рекомендуется соблюдать расстояние до коптера минимум 4–5 м.
- Убедитесь, что коптер находится в режиме Stabilized.
Не пытайтесь сразу оторвать коптер от земли, найдите минимально возможное положение стика для того, чтобы коптер начал дрейфовать по земле. В противном случае это может привести к поломкам или травмам.
В случае потери контроля над коптером необходимо сразу включать Kill Switch.
Упражнение №1. Медленно поднимайте стик газа вверх, пока коптер не начнет двигаться. В этот момент он начнет медленно дрейфовать по земле. Оставьте стик газа в таком положении и подождите пару секунд, затем переведите стик в изначальное положение, чтобы посадить коптер.
Упражнение №2. Медленно поднимайте стик газа вверх, пока коптер на начнет немного отрываться от земли. Оставьте стик газа в таком положении и подождите пару секунд, затем посадите коптер аналогично упражнению №1. Повторите упражнение 10-15 раз.
Упражнение №3. Поднимайте стик газа, пока коптер не начнет дрейфовать по земле, подождите секунду и продолжайте увеличивать газ до момента, когда коптер начнет отрываться от земли, подождите секунду и посадите коптер. Для закрепления повторяйте упражнения 10-15 раз, при необходимости увеличивая количество повторений.
Проверка
Для проверки вы можете опубликовать любое сообщение в топик с помощью команды hbmqtt_pub:
hbmqtt_pub --url mqtt://192.168.1.199:1883 -t /xxx -m 'сообщение'Где 192.168.1.199 – IP-адрес MQTT-брокера, сообщение – сообщение для публикации, /xxx – необходимый топик для публикации.
Чтобы проверить публикацию сообщений от клиента, воспользуйтесь командой hbmqtt_sub:
hbmqtt_sub --url mqtt://192.168.1.199:1883 -t /xxx
Отправленные в топик /xxx сообщения будут показаны в терминале.
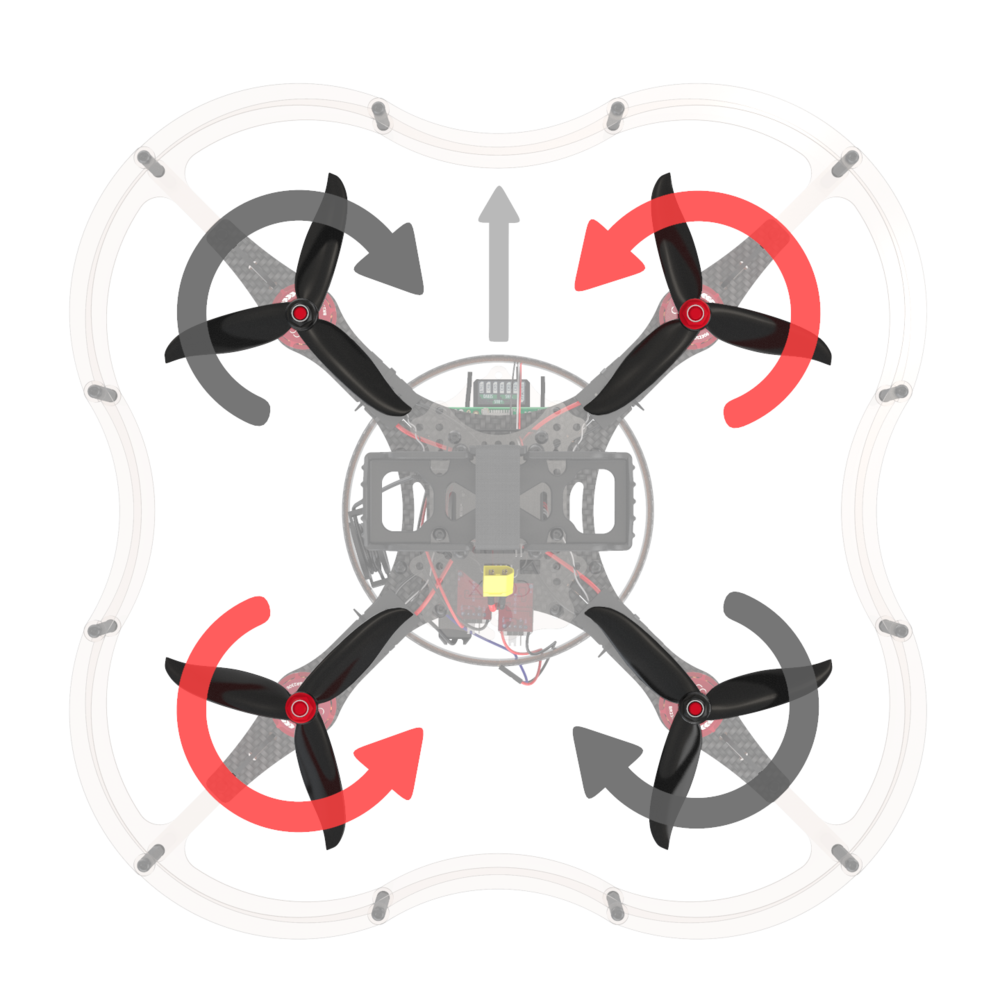
Проверка направления вращения моторов
Моторы с красными гайками должны вращаться против часовой стрелки, с чёрными – по часовой стрелке. Правильные направления вращения также указаны на самих моторах. Для проверки направления вращения можно использовать сервотестер или радиоприёмник с пультом.
- Отключите АКБ и пульт.
- Подключите сигнальный провод от ESC к выходу CH3 на приёмнике. Белый провод должен подходить к верхнему пину, чёрный – к нижнему.
- Включите пульт. Левый стик должен быть в нижнем положении.
- Подключите АКБ.
- Медленно поднимайте левый стик до тех пор, пока мотор не начнёт вращаться.
Если мотор вращается в неправильную сторону, поменяйте местами два любых фазных провода.
Направление вращения также можно изменить программно. Процесс описан в статье про прошивку ESC.
Повторите процесс для каждого мотора.
Программная часть
Для распознавания QR-кодов мы использовали библиотеку pyZBar. Она уже установлена в последнем образе для Raspberry Pi.
Скрипт будет занимать 100% процессора. Для искусственного замедления работы скрипта можно запустить throttling кадров с камеры, например, в 5 Гц (main_camera.launch):
Топик для подписчика в этом случае необходимо поменять на main_camera/image_raw_throttled.
Для распознавания цвета мы использовали OpenCV.
Работа с led-лентой через ros
В образ Клевера для Олимпиады НТИ включена нода ROS, работающая со светодиодной подсветкой. С её помощью можно управлять светодиодами, не запуская свою программу из-под sudo. По умолчанию эта нода выключена, но её можно включить, если в файле /home/pi/catkin_ws/src/ros_ws281x/launch/clever4.launch изменить строку
и перезапустить службу rosled:
sudo systemctl restart rosled
Пример работы со светодиодной лентой:
import rospy
from ros_ws281x.srv import SetLeds
from ros_ws281x.msg import LEDState, LEDStateArray
from std_msgs.msg import ColorRGBA
NUM_LEDS = 60
set_leds = rospy.ServiceProxy("/led/set_leds", SetLeds, persistent=True)
deffill_strip(red, green, blue):
led_msg = LEDStateArray()
led_msg.leds = []
for i in range(NUM_LEDS):
led = LEDState(i, ColorRGBA(red, green, blue, 0))
led_msg.leds.append(led)
set_leds(led_msg)
fill_strip(255, 0, 0)
rospy.sleep(2.0)
fill_strip(0, 255, 0)
rospy.sleep(2.0)
fill_strip(0, 0, 255)
rospy.sleep(2.0)
fill_strip(0, 0, 0)
Работа с газом
Первым делом необходимо почувствовать отзывчивость коптера на движение стика газа и научиться им управлять. Каждый коптер имеет немного различные запасы мощности и соответственно отрывается от земли при разных положениях стика.
В данном упражнении необходимо использовать только стик газа. Во время выполнения упражнения рекомендуется не использовать остальные стики.
Основные задания упражнения:
- Дрейф коптера по земле, не отрываясь от земли.
Работа с клевером
Для выполнения команд на Клевере:
После подключения к своему дрону по SSH, смените пароль SSH-доступа, чтобы другие участники не смогли несанкционированно подключаться к нему. Для этого используйте команду passwd.
Для редактирования файлов на Клевере вы можете использовать консольные редакторы nano или vim. Также вы можете загружать файлы используя PyCharm или WinSCP.
Для автономного полета используйте API модуля simple_offboard.
При использовании русских букв в скрипте на Python 2, добавьте в начало программы следующую строку:
Пример программы, выполняющей взлет, полет в точку в системе координат площадки и посадку на Python:
import rospy
from clever import srv
from std_srvs.srv import Trigger
rospy.init_node('flight')
get_telemetry = rospy.ServiceProxy('get_telemetry', srv.GetTelemetry)
navigate = rospy.ServiceProxy('navigate', srv.Navigate)
land = rospy.ServiceProxy('land', Trigger)
navigate(x=0, y=0, z=1, speed=1, frame_id='body', auto_arm=True)
rospy.sleep(5)
navigate(x=3, y=2, z=1, yaw=3.14, speed=0.5, frame_id='aruco_map')
rospy.sleep(5)
land()
Пример взлета на высоту 1 метр из командной строки:
rosservice call /navigate "{x: 0.0, y: 0.0, z: 2, yaw: 0.0, yaw_rate: 0.0, speed: 0.5, frame_id: 'body', auto_arm: true}"Для более подробной информации и описания других команд смотрите API simple_offboard и примеры кода.
Работа с креном и тангажом
После освоения управления газом коптера, необходимо научиться управлять его горизонтальным положением. За это отвечает правый стик на радиоаппаратуре.
Управление данными осями интуитивно понятно:
- Стик наклонен вперед (вверх) – коптер движется вперед.
- Стик наклонен назад (вниз) – коптер движется назад.
- Стик наклонен вправо – коптер движется вправо.
- Стик наклонен влево – коптер движется влево.
Чем сильнее стик будет наклонен в сторону, тем сильнее коптер будет наклоняться в сторону быстрее двигаться.
Основные задания упражнения:
- Полет по оси X, вперед/назад.
- Полет по оси Y, влево/вправо.
- Стабилизация коптера на одном месте.
- Полет по квадрату по часовой стреле и против.
Старайтесь всегда находится позади коптера, таким образом, чтобы его задняя часть была направлена к вам, иначе вы можете потерять управление над ним, перепутав стороны.
Как и в случае с управлением газом, перед полетом выполняйте следующие действия.
Если коптер сильно вращается вокруг своей оси, посадите его и повторно откалибруйте магнитометр и гироскоп.
Упражнение №1. Аналогично упражнениям по управлению газом поднимайте стик газа, пока коптер на начнет дрейфовать по земле или немного подпрыгивать, затем отпустите стик газа, оставив его в таком положении, и поднимайте стик тангажа, сначала вверх, на протяжении секунды, затем вниз.
Упражнение №2. Поднимайте стик газа, пока коптер не начнет дрейфовать, затем оставьте его и перемещайте стик крена сначала вправо, на протяжении секунды, затем влево. При этом коптер будет постепенно перемещаться сначала вправо, а затем влево. Повторите упражнение 5-10 раз, пока не почувствуете отзывчивость коптера на движение стика.
Упражнение №3. Поднимайте стик газа, пока коптер не начнет дрейфовать, затем оставьте его. Совместите первое и второе упражнение и постарайтесь стабилизировать коптер в одной точке, компенсируя его дрейф с помощью стика. Удерживайте коптер 20-30 секунд.
Упражнение №4. Поднимайте стик газа, пока коптер не начнет дрейфовать, затем оставьте его. Почувствовав отзывчивость коптера на изменения стиков выполните фигуру “квадрат” со стороной 1 м, сначала по часовой стрелке, а затем против. Выполняйте фигуры по 2-3 раза.
Работа с рысканьем
При визуальном управлении мультикоптерными устройствами, рысканье не играет на столько важной роли, как с самолетной технике, поскольку коптер может передвигаться в любую сторону вне зависимости от того, куда он направлен.
Термин рысканье (yaw) обозначает поворот коптера вокруг вертикальной оси.
Основные задания:
- Оборот коптера вокруг себя, ориентируя заднюю часть коптера к себе.
- Оборот вокруг коптера, ориентируя заднюю часть к себе.
Для выполнения представленных упражнений рекомендуется найти большое свободное пространство.
Аналогично с предыдущими упражнениями перед взлетом выполните предполетные проверки.
Упражнение №1. Поднимите коптер на воздушную подушку и стабилизируйте его в одной точке. Описывайте коптером круг вокруг себя, на расстоянии 2-3 м, при этом поворачивая его таким образом, чтобы задняя часть коптера всегда была направлен на вас. Выполняйте упражнение по часовой стрелке и против. Повторите упражнение 4-5 раз.
Упражнение №2. Поднимите коптер на воздушную подушку и стабилизируйте его в одной точке. Обойдите коптер вокруг, при этом поворачивая его таким образом, чтобы задняя часть была направлена на вас. Обходите коптер по часовой стрелке и против. Повторите упражнение 4-5 раз.
Дополнительные упражнения значительно сложнее обычных и не обязательны к выполнению. Приступайте к ним, только если вы уже уверенно управляете коптером.
Дополнительное упражнение №1. Поднимите коптер на воздушную подушку и стабилизируйте его в одной точке. Разверните коптер передней частью к себе и пробуйте управлять им задом наперед.
Дополнительное упражнение №2. Поднимите коптер на воздушную подушку и стабилизируйте его в одной точке. Выполняйте полет таким образом, чтобы передняя часть коптера всегда смотрела в сторону его движения.
Работа с светодиодной лентой
В используемой версии Клевера LED-лента подключена напрямую к Raspberry Pi. При включении всех светодиодов ленты на полную мощность возможно повреждение цепей питания микрокомпьютера.
Сигнальный провод ленты подключен к GPIO-пину 18.
Про работу с LED-лентой можно прочитать в соответствующей статье.
Сборка
Теперь когда у вас есть все нужные части захвата, можно начинать сборку.
Все винтовые соединения рекомендуется фиксировать с помощью синего loctite.
- В первую очередь нужно вырезать из губки или поролона прокладки подходящие по размеру. Для этого можно напечатать на листе А4 приложенный чертеж и аккуратно вырезать деталь.
- Далее при помощи клея четыре губки вклеиваются внутрь куба как показано на чертеже.
- Оставшиеся губка вклеивается в крышку.
- При помощи гаек, винтов м3-12мм прикручиваем ножки к боковым креплениям
- Крепление камеры прикрутить к боковому креплению как показано на чертеже. Теперь это будет передняя часть захвата.
- Прикрутите уголки к боковым пластинам используя винты 14мм.
- Вставьте демпферы в специализированные отверстия центрального куба.
- Закрепите на демпферах боковые пластины
- Закрепите демпферы при помощи штифтов (проденьте штифт в демпфер с внутренней стороны и закрепите его крышечкой)
- Проденьте ленту через куб закрепив в зажиме.
- Проденьте ленту в катушку и прихватите клеем.
- Прикрутите сервопривод с катушкой к специальному креплению как показано на чертеже. И вкрутите винт м2 с другой стороны.
- Прикрутите ко второму сервоприводу шестерню.
- Присоедините крышку к кубу.
- Прикрутите второй сервопривод к специальному креплению.
- Прикрепите камеру и датчик высоты.
- Прикрепите нижнюю пластину Клевера к верхней пластине захвата.
- Прикрутите верхнюю пластину к уголкам.
- Подключите сервоприводы. Красные провода подключаем к 5V, черные к GND, сигнальный провод от сервопривода, отвечающего за открытие крышки к GPIO27, а сервопривод отвечающий за натяжение ленты к GPIO22.
Если вы хотите использовать захват при полете в автономном режиме, то следует поменять параметры в main_camera.launch на следующие:
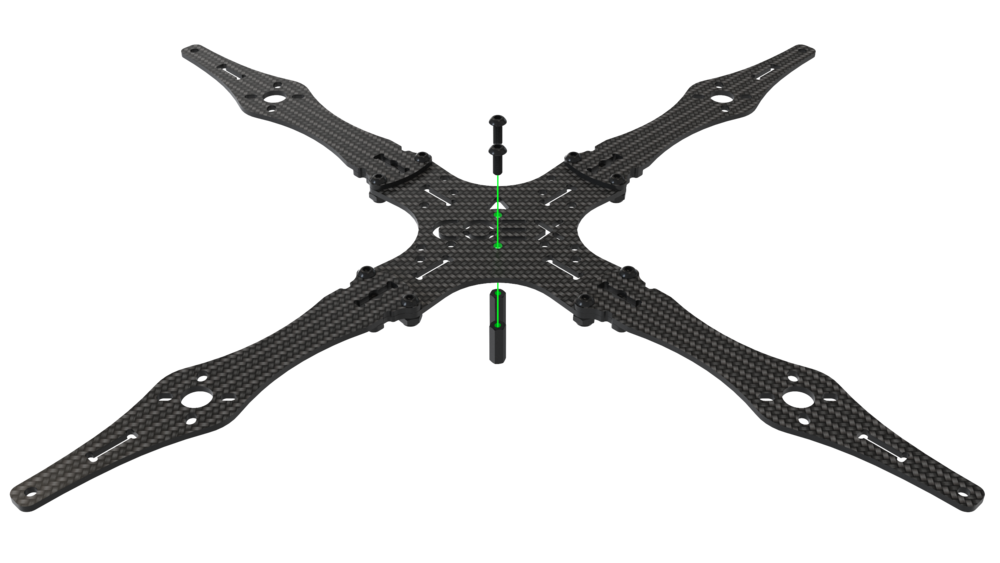
Сборка рамы
Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и самоконтрящихся гаек.
На центральные отверстия в главной деке установите 2 стойки 15 мм и закрепите их с помощью винтов М3х8.
Установите крючок пластины жесткости в паз на луче.

Прижмите пластины жесткости к главной деке.
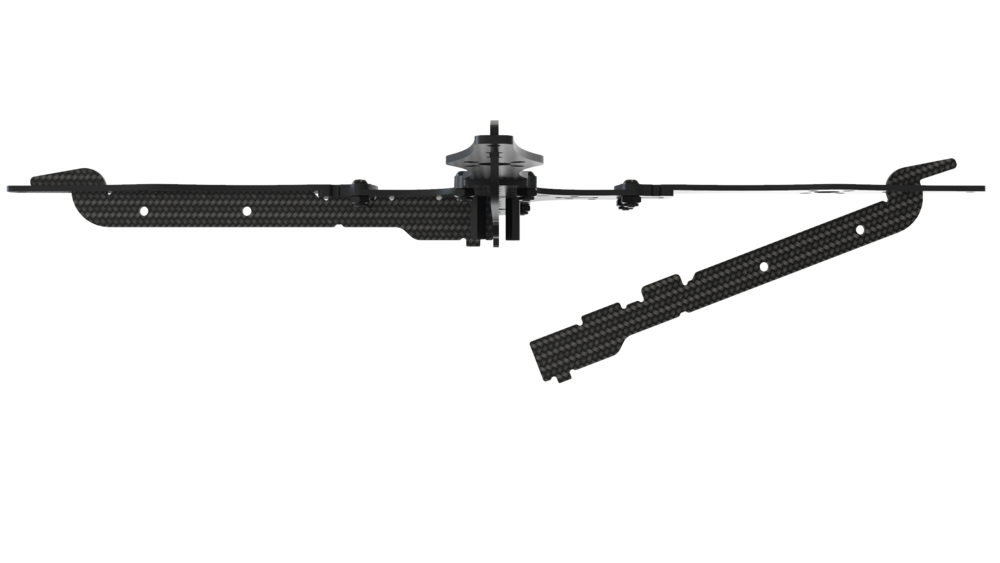
Стяните пластины жесткости с помощью малой карбоновой деки.
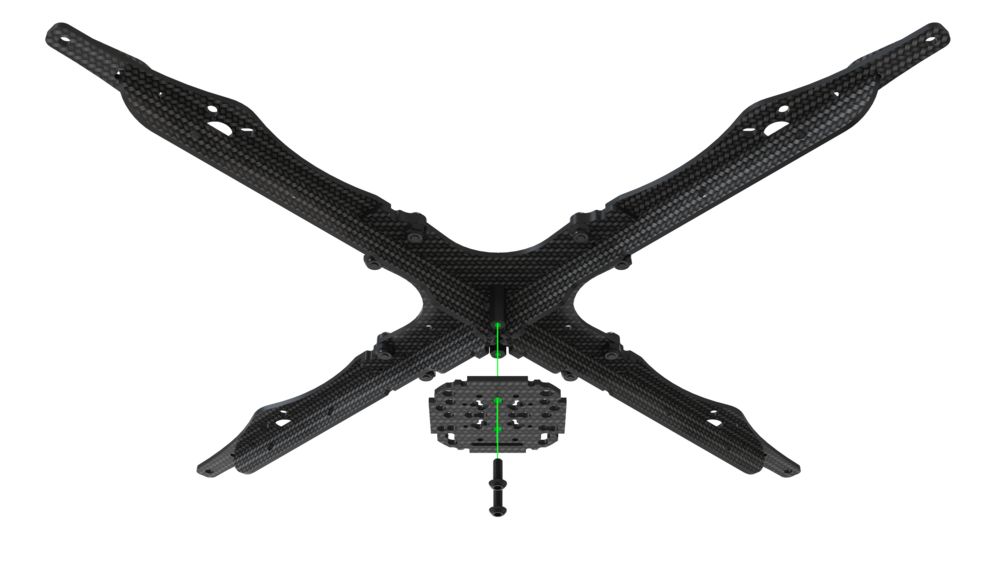
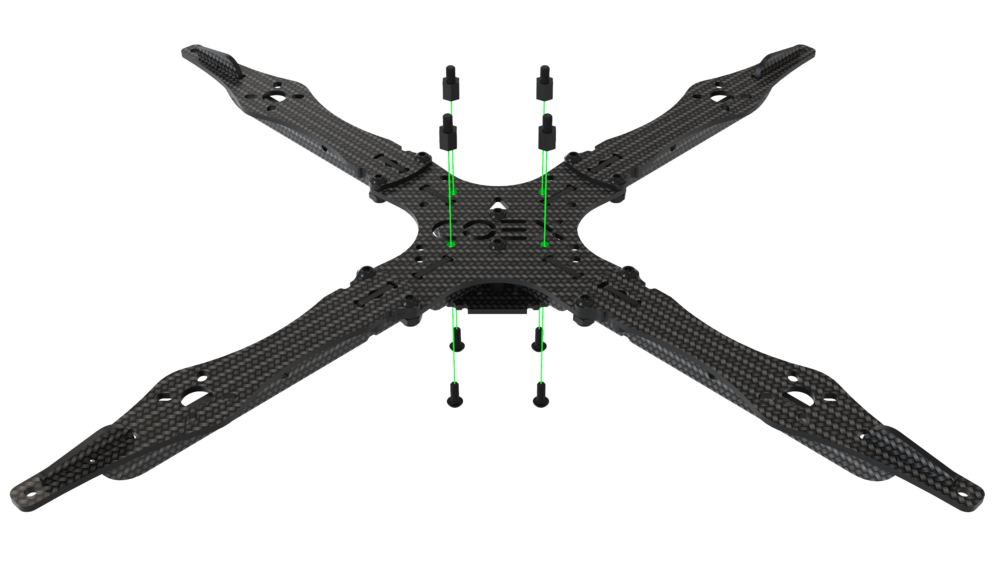
Установите 4 нейлоновые стойки 6мм и закрепите их с помощью винтов М3х5.
Свободный полет
Если вы можете выполнить каждое из описанных выше упражнений, скорее всего, вы уже умеете свободно взлетать и управлять коптером. Далее будут представлены некоторые упражнения для закрепления полученных навыков.
Упражнения:
- Полет по вертикальному квадрату.
- Полет по граням куба.
- Полет по вертикальному кругу.
- Полет по восьмерке.
- Подъем коптера по спирали.
Закрепляйте полученные навыки необходимое для вас количество раз.
Сопряжение приемника и пульта
Подключить провод 5В от BEC в разъем приемника.
Установить BIND разъем в крайний правый порт B/VCC.
Подключить АКБ. Индикатор на приемники должен быстро мигать (режим сброса).
Зажать и удерживать кнопку BIND на пульте и включаем пульт.
На пульте отображается процесс сопряжения RXBinding
После установки сопряжения (появление допю строк на дисплее пульта):
- Убрать BIND разъем из приемника.
- Отключить АКБ.
Если пульт не включается или заблокирован, см.
статью неисправности пульта.
Сопряжение приёмника и пульта
- Выключите пульт с помощью слайдера POWER.
- Подключите радиоприемник к разъему BEC 5В. Чёрный провод подключите к одному из нижних пинов, красный – к одному из центральных.
- Установите джампер на вход (B/VCC).
- Подключите АКБ.
Светодиод на радиоприемнике должен мигать.
Зажмите кнопку BIND KEY на пульте.
Включите пульт (перещелкните POWER, не отпуская BIND KEY).

Ждите синхронизации.
- Отсоедините джампер.
- Светодиод на приемнике должен гореть непрерывно.
Состав конструктора
- Рама центральная x2.
- Рама дополнительная х4.
- Луч x8.
- Ножки x8.
- Защита для лучей x8.
- Защита пропеллеров x16.
- Защита боковая x16.
- Пропеллер пластиковый Dalprop 5045 x4.
- Бесколлекторный электродвигатель Racerstar BR2205 2300kV x4.
- Регуляторы хода ESC, DYS XSD20А x4.
- Разъем силовой XT60 pin x1.
- Разъем силовой XT60 socket x1.
- Трехпроводной шлейф “мама-мама” x2.
- Провод медный многожильный с силиконовой изоляцией 14AWG (красный, черный), длина 50 см.
- Плата распределения питания PDB BeeRotor Power Distribution Board V2.0 x1.
- Аккумуляторная батарея (АКБ) Li-ion 18650 x8.
- Зарядное устройство EFEST Luc V4 Li-lon x1.
- Защитный бокс регуляторов x4.
- Крепление под ножки x8.
- Полетный контроллер Pixhawk x1.
- Радиоприемник FlySky i6 x1.
- Радиопульт FlySky i6 x1.
- Зарядное устройство EFEST LUC V4 x1.
- Провод Micro USB – USB x1
- Батарейный отсек 18650 Li-ion x1
- Провод медный многожильный с силиконовой изоляцией 18AWG (красный, черный), длина 100 см.
- Батарейка АА х4
- Джампер, Bind-разъем
Состояния готовности к полету
Прежде чем начинать полет, необходимо перевести коптер в состояние Armed.
- Состояние Armed – моторы вращаются в соответствии с положением стика газа, коптер готов к полету.
- Состояние Disarmed – моторы не вращаются, коптер не реагирует на стик газа.
По умолчанию коптер находится в состоянии Disarmed и переходит в него в случае если вы долго не взлетаете.
Для перевода коптера в состояние Armed есть несколько способов:
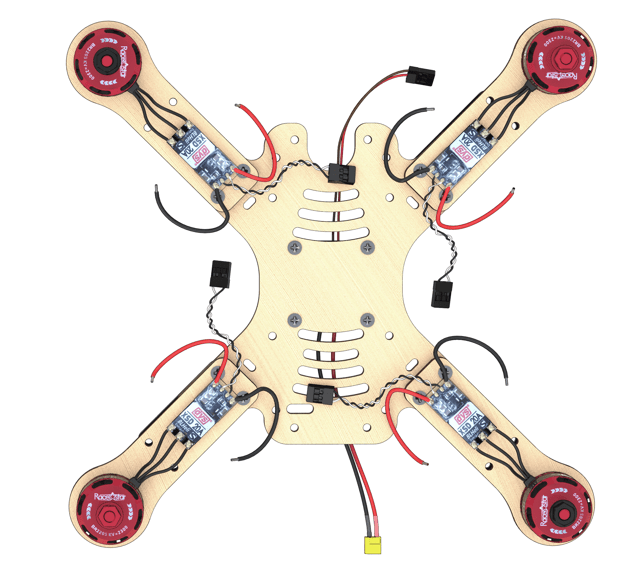
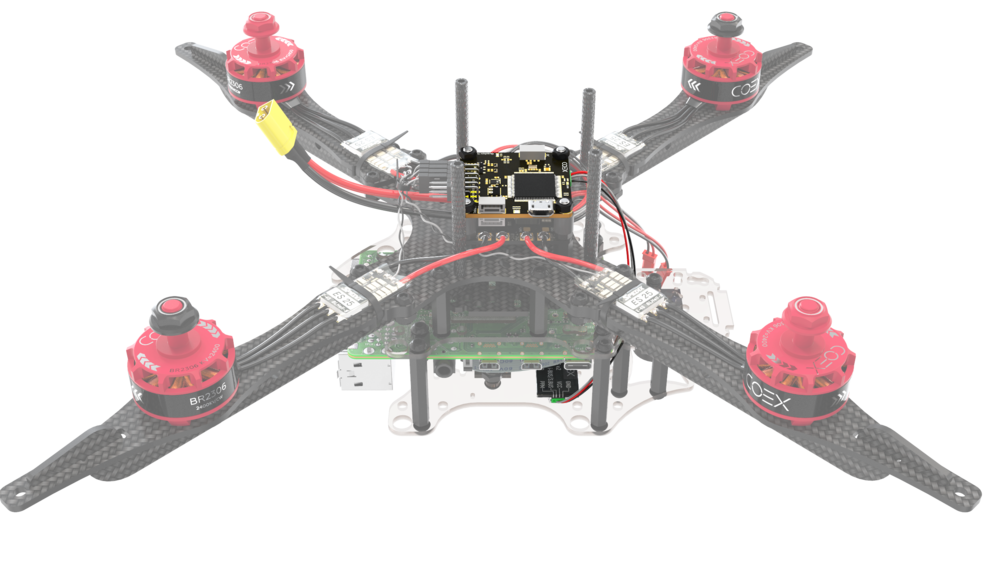
Установка esc и pdb
На заранее закрепленные стойки установите плату распределения питания (PDB), она должна быть установлена таким образом, чтобы силовой кабель питания был направлен в сторону хвоста коптера.
Установите регуляторы оборотов (ESC) в соответствующие места на луче.
Притяните регуляторы оборотов (ESC) хомутами.
Отмерьте необходимое количество силового провода регуляторов оборотов(ESC), и обрежьте лишнее.
Зачистите и залудите обрезанные провода.
Залудите контактные площадки на плате распределения питания.
Припаяйте силовые провода регуляторов оборотов к плате распределения питания.
Будьте внимательны к подписям контактов на плате. Красный провод должен идти к площадке с подписью , а черный к подписи –.
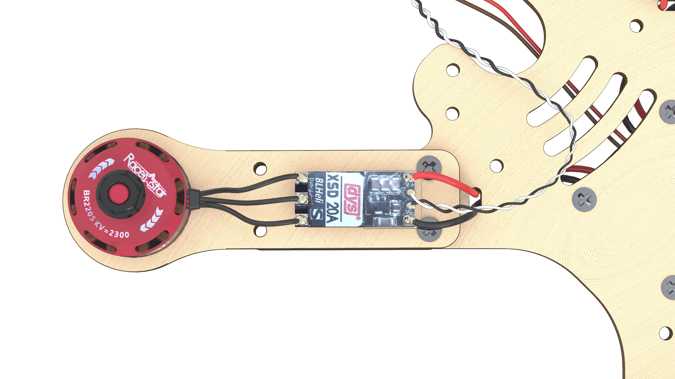
Обрежьте лишний фазный кабель идущий от моторов.
Зачистите и залудите фазные кабели.
Залудите контактные площадки регуляторов оборотов.
Припаяйте фазные кабели к контактным площадкам регуляторов в любом порядке.
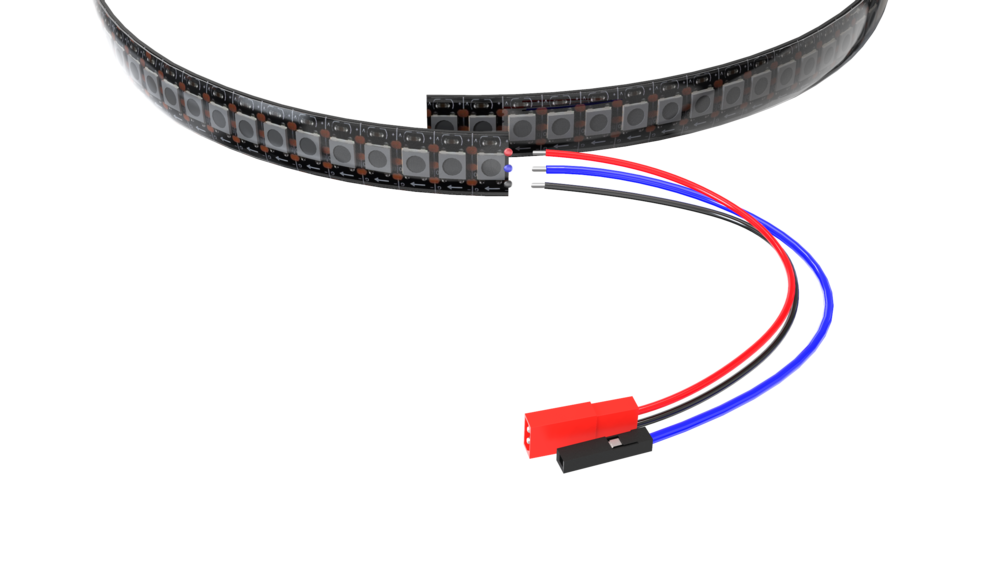
Припаяйте 3 разъема JST мама к 2ум площадкам 5V и площадке bat .
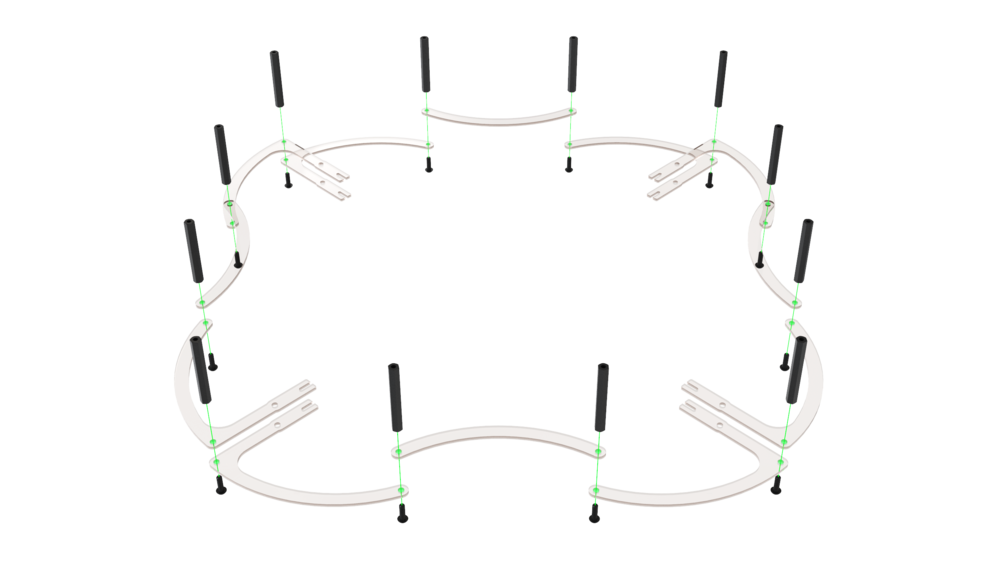
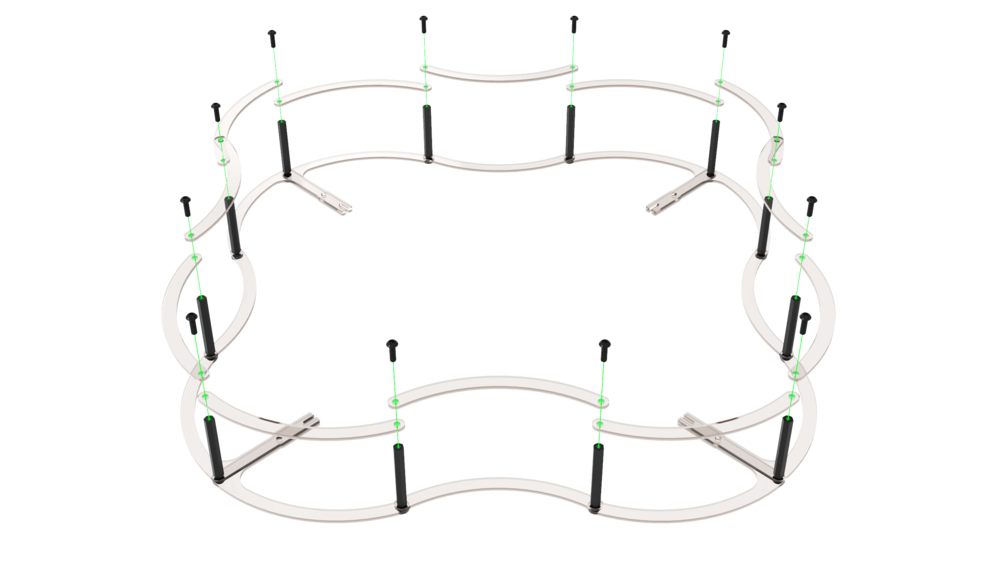
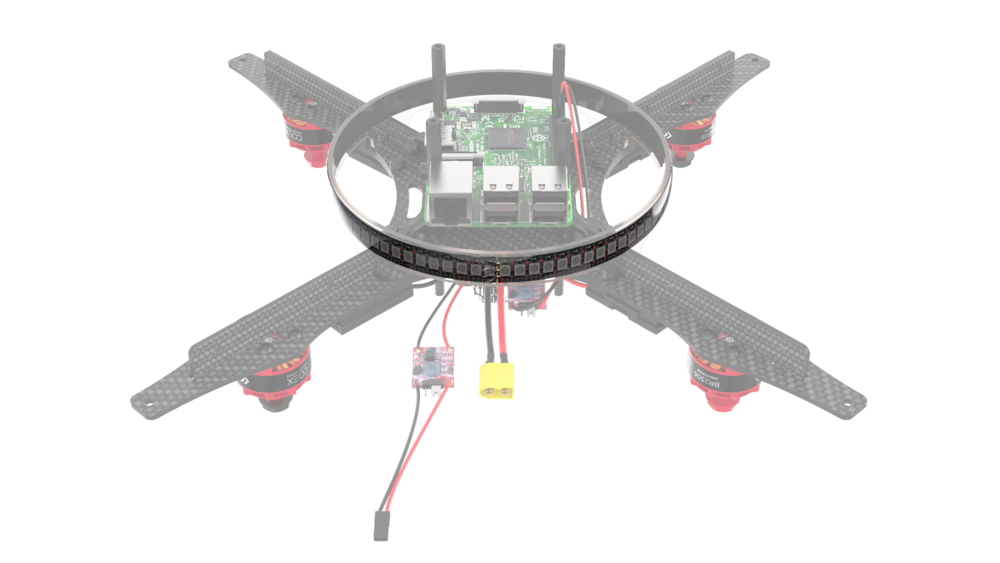
Установка led ленты и ножек
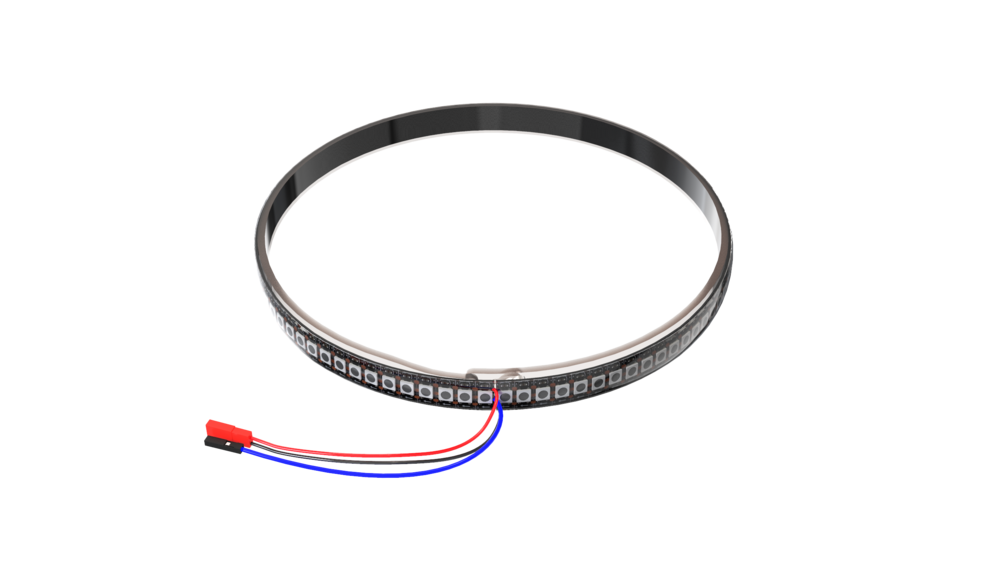
Соберите обруч для светодиодной ленты, объединив замок на концах.

Припаяйте JST-папа к площадке питания и Dupont-мама к сигнальной площадке.
Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3–4 хомутов.
Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х10 используя только крайние монтажные отверстия. Снизу, между пластинами ножек, установите демпферное силиконовое колечко.
Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х10.
Подключите питание светодиодной ленты в разъем JST 5V на плате распределения питания.
Подключите сигнальный выход светодиодной ленты в Raspberry Ri, к пину GPIO21.
Установите монтажную деку и закрепите ее винтами М3х8.
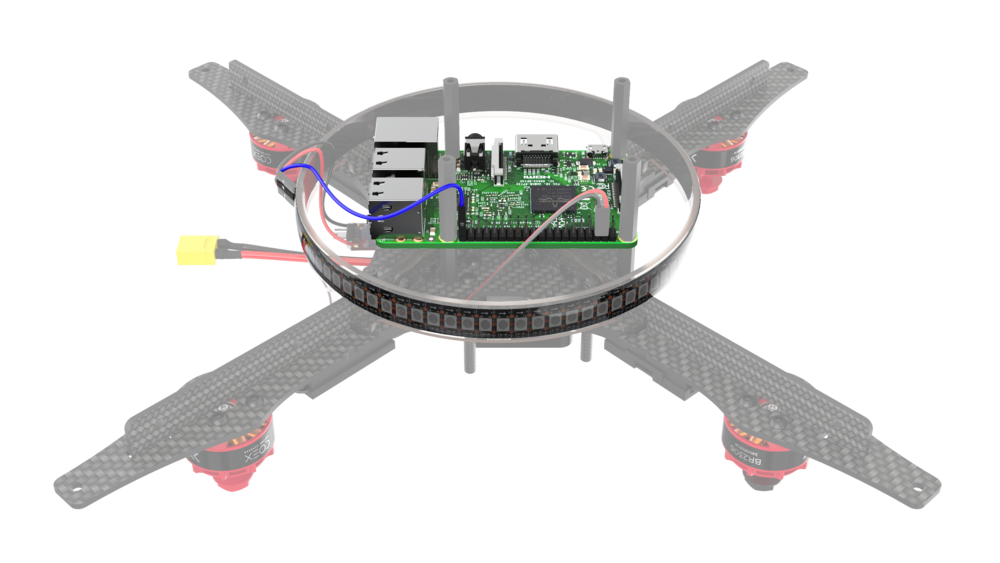
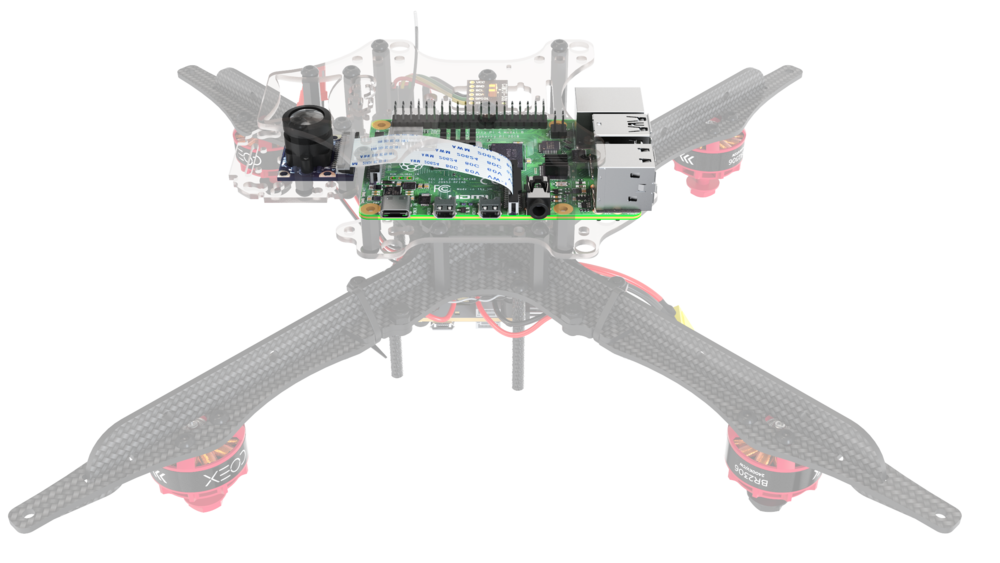
Установка raspberry pi
На монтажную деку установите стойки 20 мм и 40 мм, закрепите их с помощью винтов М3х8.
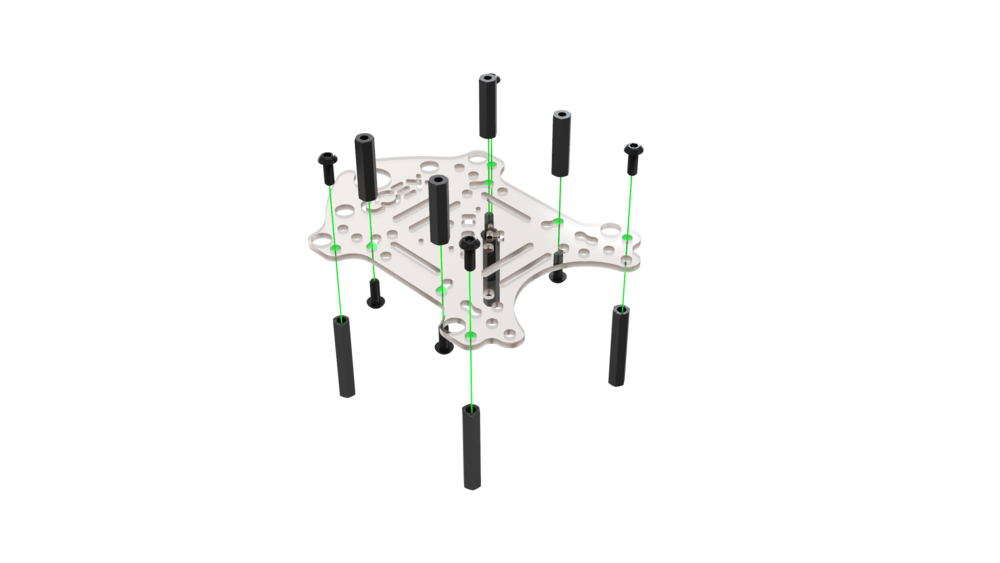
Нарежьте резьбу М3 в крепежных отверстиях Raspberry Pi с помощью болта М3х10.
Вкрутите в плату Raspberry Pi стойки 6мм, при необходимости закрепите их нейлоновыми гайками.
Установите Raspberry Pi на монтажную деку, закрепив ее болтами М3х6.
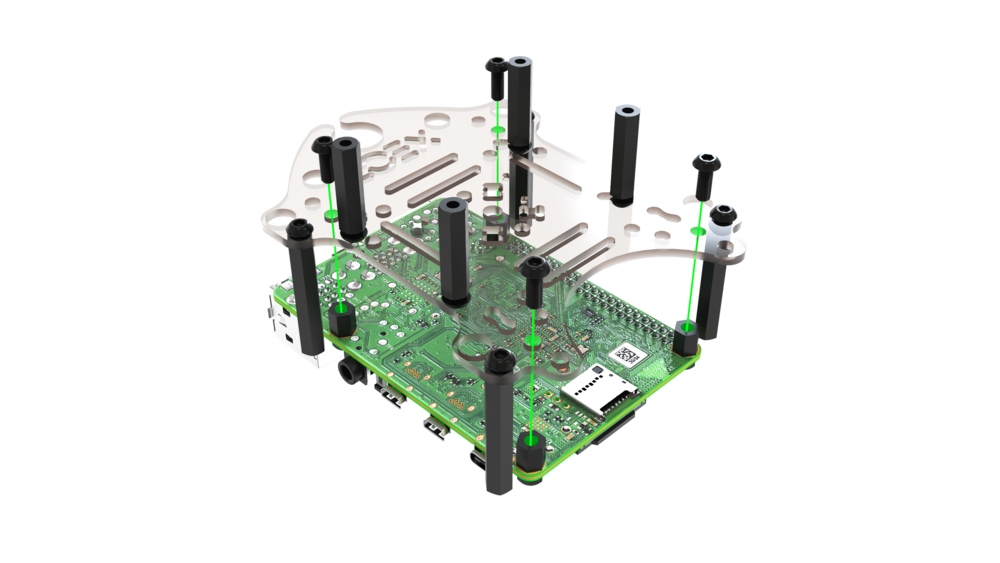
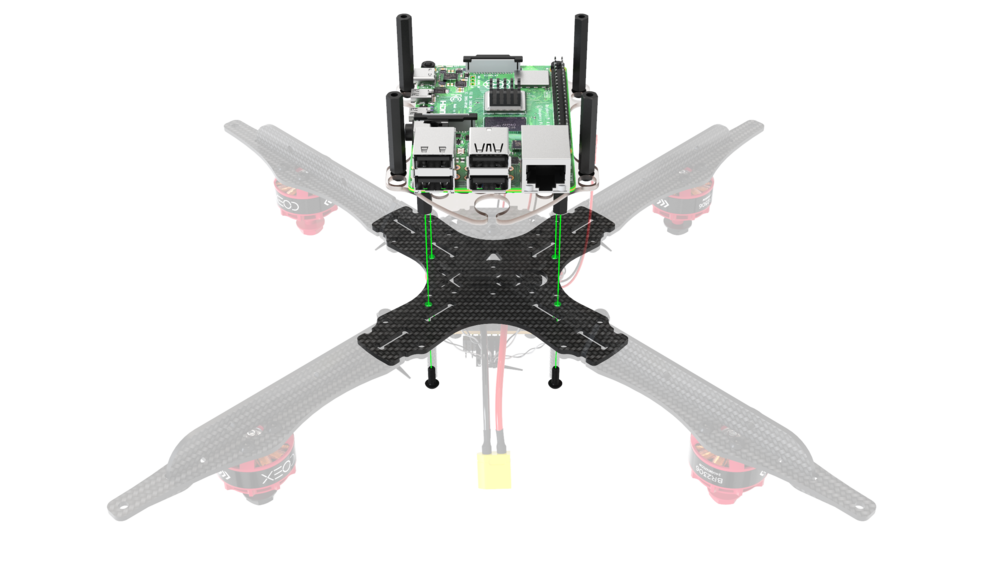
Установите собранный модуль в соответствующие пазы основной деке дрона.
Подключите разъем 5V JST в соответствующие пины питания Raspberry Pi.

Возьмите 4 провода Dupont, обрежьте 5–7 см кабеля и припаяйте к соответствующим пинам дальномера.
Провод Пин дальномера Красный 5v Черный GND Желтый SDA Зеленый SCL Установите дальномер на деку захвата и Приклейте радиоприемник на 3М скотч.
Устанавливайте дальномер таки образом, чтобы гайки не прислонялись к плате напрямую. При такой установке если большая вероятность повредить элементы платы.
Установите 4 нейлоновые стойки 20мм и зафиксируйте их болтами М3х8.
На малую монтажную деку установите камеру и зафиксируйте ее двумя короткими саморезами.
Если закрепить камеру в верхнем правом углу и шляпка самореза будет касаться элемента на камере, камера не будет работать.
Установите малую монтажную деку с камерой на стойки и зафиксируйте с помощью болтов М3х8.
Собранный модуль установите над модулем Raspberry Pi и зафиксируйте болтами М3х8.

Соедините камеру и Raspberry Pi с помощью шлейфа.
Подсоедините дальномер к Raspberry Pi в соответствующие пины.

Соедините радиоприемник и полетный контроллер с помощью 4-х пинового кабеля.
Установка акб
Убедитесь, чтобы все провода были спрятаны и движению пропеллеров ничего не мешает.
Проверьте сборку квадрокоптера:
- Балансировочный разъем АКБ должен быть спрятан под утягивающим ремешком.
- Регуляторы должны быть зафиксированы хомутами.
- Все провода, идущие от PDB и полетного контроллера, должны быть зафиксированы липучкой или обмотанной вокруг алюминиевых стоек.
- Пропеллеры установлены правильной стороной и соответствуют направлению кручения моторов.
Обязательно установите и настройте индикатор напряжения перед полетом, чтобы не переразрядить аккумулятор. Для настройки индикатора используйте кнопку расположенную в его основании. Отображаемые цифры во время настройки обозначают минимально возможное напряжение в каждой ячейке аккумулятора, рекомендуемое значение 3.5.
Звуковая индикация означает, что ваш аккумулятор разряжен и его нужно зарядить.
Дрон готов к полету!
Установка защиты
Соберите нижний уровень защиты с помощью стоек 40 мм и винтов М3х10.
Соберите верхний уровень защиты с помощью винтов М3х10.
Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х10.
Подключите полетный контролер к Raspberry Pi с помощью USB к кабеля.
Установите ремешок для крепления АКБ.
Дрон собран, далее произведите настройку.
Установка моторов
При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
Установите мотор на соответствующие отверстия в луче с помощью винтов М3х5.
Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
Установка полетного контроллера
Набор “Клевер 4” позволяет установить различные полетные контроллеры, к примеру, COEX Pix и Pixracer.
При установке полетного контроллера обратите внимание на ориентацию платы. Если Вы установите COEX Pix серворазъемами назад (как на изображениях в инструкции) то впоследствии при настройке полетного контроллера в Autopilot Orientation необходимо будет указать значение ROTATION_ROLL_180_YAW_90, иначе полетный контроллер будет некорректно воспринимать наклоны и повороты коптера. Для полетного контроллера Pixracer это не требуется.
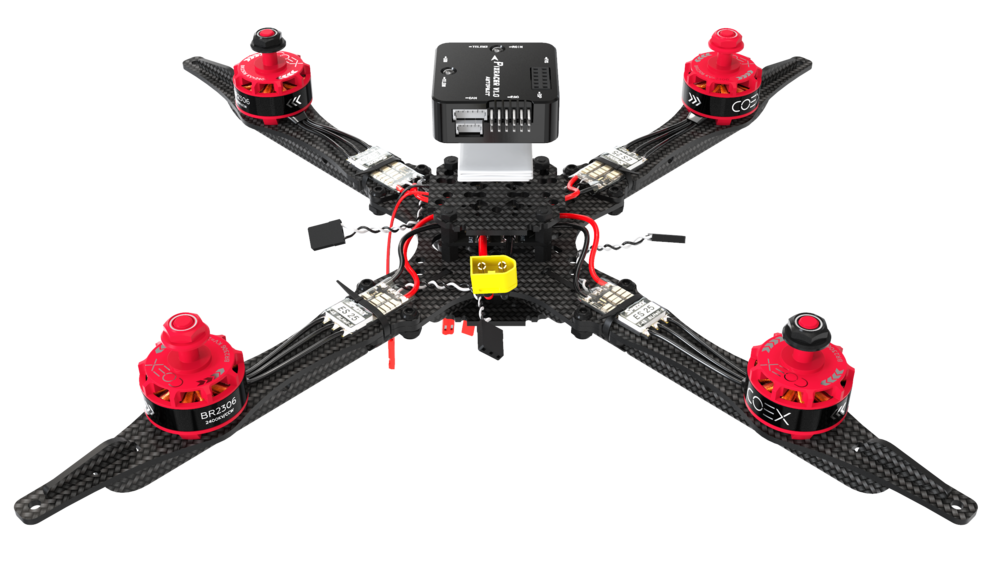
Установка полетного контроллера pixhawk
- Клеим 2х сторонний скотч по углам полетного контроллера.
При работе моторов возникают вибрации, отрицательно влияющие на показания датчиков полетного контроллера Pixhawk. Чтобы избежать этого эффекта, количество слоев двустороннего скотча
лучше увеличить до 4-5. - Установить полетный контроллер в центр рамы.

Стрелки на раме и Pixhawk должны быть сонаправлены
Установка пропеллеров и акб
Установите ремешок для аккумулятора.
Установите пропеллеры в соответствии со схемой направления движения моторов.
Закрепите пищалку и установите аккумулятор.
Установка пропеллеров и подготовка к полёту
Произведите настройку компонентов квадрокоптера, используя раздел “Настройка”.
Установка пропеллеров должна производиться только после окончательной настройки коптера, непосредственно перед полетом.
Установите 4 пропеллера, согласно схеме вращения. При установке пропеллеров АКБ должна быть отключена.
При установке будьте внимательны, чтобы пропеллер не был перевернут. На лицевой стороне пропеллера имеется маркировка его характеристик, а также направление вращения, которое должно совпадать с направлением вращения моторов.
Установка светодиодной ленты на обруч
Проверьте наличие напаянных пинов на контактах ленты (при отсутствии – напаять).
Установите светодиодную ленту на обруч (используя клеевой слой на ленте) так, чтобы контакты были в задней части коптера. Для дополнительной фиксации используйте стяжки.
Функционал радиопульта flysky i6
- Переключатель A (SwA).
- Переключатель B (SwB).
- Переключатель С (SwC).
- Переключатель D (SwD).
- Левый стик.
- Правый стик.
- Левый триммер.
- Правый триммер.
- Кнопка Вверх.
- Кнопка Вниз.
- Кнопка Ок.
- Кнопка Отмены.
- Кнопка BIND KEY.
- Переключатель питания POWER.
- ЖК-дисплей.
- Ручка A (VrA).
- Ручка B (VrB).


