

- Что стоит учесть при подборе всех запчастей
- Габариты коптеров
- Детали самодельного квадрокоптера
- Дополнительные соображения
- Как подключить электронику всего квадрокоптера
- Камера
- Композитчики показали мастерство изготовления корпуса квадрокоптера
- Материалы исполнения бпла/конструкция
- Методические рекомендации
- Монтаж caddx tarsier 4k в стэк, в башню
- Монтаж приемника
- Принцип полета
- Промышленный дизайн квадрокоптера
- Промышленный дизайн квадрокоптеров: конструкция
- Процесс сборки
- Прошиваем полетный контроллер в betaflight configurator
- Прошивка регуляторов оборотов в blhelisuite
- Сборка рамы
- Типы рам бпла
- Трикоптер
- Квадрокоптер
- Гексакоптер
- Y6
- Октокоптер
- X8
- Размер бпла
Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV-квадрокоптера с камерой, следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.
Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а также для тестирования коптера в домашних условиях на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.
Если в перспективе использование экшн-камеры, следует оставить место для приёмника и передатчика сигнала камеры на планшет и место для ее крепежа.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter — это его «мозги», а именно, контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму — гироскоп и акселерометр.
Габариты коптеров
Самый маленький дрон весит около 15 грамм и летает на расстояние до 15 м. Тяжелыми квадрокоптерами считаются те, вес которых превышает 2,5 кг. Такие аппараты могут поднимать груз весом до 100 кг.
Микрокласс – квадрокоптеры размером со среднюю бабочку. DHD D1 – яркий представитель этого класса. Он может послужить тренировочной моделью или интересной игрушкой, поскольку не боится ударов о стены или мебель. Еще один представитель – Cheerson CX-10W уже оснащен видеокамерой и WI-FI, управляется через смартфон или планшет.
Обратитесь к специалистам компании KLONA для визуализации и моделирования вашего коптера. Это поможет оценить технические возможности дрона, а также усовершенствовать модель.
Маленький класс – дроны, которые стоит выгуливать дома, поскольку они меняют свое направления от легкого дуновения ветра. Дальность действия около 30 м и размером до 200 мм. Например, Eachine H8 Mini – один из ярких представителей данного класса. Дальность полета до 30 м и перевороты на 360° обеспечили ему популярность.
250 класс квадрокоптеров – это аппарат для улицы. Им не страшны порывы ветра, они способны поднять камеру для качественной аэросъемки. Также в эту категорию попадают гоночные аппараты, которые профессионалы укомплектовывают на свое усмотрение. Например, Walkera runner 250 создан специально для гонок и может лететь на расстояние до 1 км, зарядка держит около 60 минут.
Более тяжелый – 350 класс. Один из самых крутых представителей – DJI Phantom 3 Pro. Радиус действия такой игрушки – 2 км, высота полета –120 м. Аппарат поддерживает GPS. Коптер того же производителя Phantom 3 имеет практически аналогичные характеристики, только он не оснащен камерой. Конструкция предусматривает установку той камеры, которая есть у пользователя.
Следующий класс – 450. Один из самых ярких его представителей – шустрый и устойчивый IFLY-4 ARF. Оригинальный дизайн и у коптера Udi RC U842-1, оснащенного камерой и защитой лопастей.
550 класс и выше – это коптеры, которые стоят, как неплохой автомобиль. Но качество снимков и стабильность полета ценятся специалистами. Подобные аппараты чаще собираются умельцами в домашних условиях из-за высокой стоимости промышленных образцов. Оригинальным дизайном, по мнению автора, отличается дрон JXD 507W FPV – мощный, надежный, маневренный, похож на межпланетный корабль.
Квадрокоптеры, рамы которых выше 800 мм, предназначены для съемки тяжелыми зеркальными камерами.
Компания KLONA – специалист в области промышленного дизайна. Мы разработаем дизайн квадрокоптера, а также распечатаем его и подготовим схемы и платы, чтобы он правильно работал. Для уточнения стоимости заказа свяжитесь с нашим менеджером.
Детали самодельного квадрокоптера
Двигатели для квадрокоптера, 4 шт –
Регуляторы оборотов, 4 шт –
Воздушные винты – и , последние – правого вращения, на коптер ставятся парное количество винтов прямого и обратного вращения.
Разъем подключения – это силовой разветвитель для регуляторов Multistar (ХТ60 на 4 X 3.5мм)
Плата управления квадрокоптером – , подсоединяется к компьютеру по usb, позволяет заливать настройки и конфигурации.
Аккумулятор – , лучше брать сразу пару, так как выезжать ради полетов на одном аккумуляторе быстро надоедает. Я обычно с собой на выезд беру не менее 4-х аккумуляторов.
Зарядное устройство – , зарядник необходим для перезарядки аккумулятора.
Кроме этого потребуется аппаратура радиоуправления квадрокоптером. Я предпочтение отдаю , это наилучшее соотношение цена/качество. Дальность радиоуправления около 800-900 метров. Приемник идет в комплекте с передатчиком.
Соединители платы управления с приемником , они позволяют легко соединить приемник и мозги квадрокоптера.
«Силиконовые» провода для удлинения питания моторов – , – взять пару штук того и другого.
- Рама
- Электромоторы 4 шт.
- ESC или электронный регулятор скорости 4 шт.
- Плата управления
- Радио передатчик и приемник сигнала
- Лопасти 4 шт. (2 — для вращения по часовой стрелке и 2 — против часовой)
- Батарея и зарядное устройство для нее
Кроме того вам понадобятся всякие мелкие запчасти, материалы такие как хомуты, двусторонний скотч, проволока, держалка для батареи, перемычки, болтики и т.п., но обо всем по порядку. Нужны будут еще и кое какие инструменты. У вас должен быть паяльник с не сильно толстым жалом и вы должны уметь им пользоваться, отвертка, шестигранные ключи, плоскогубцы, клей или лучше клеевой пистолет. А теперь мы пробежимся подробно по каждой детали в отдельности и дадим уже более конкретные советы.
В принципе любой летательный аппарат должен иметь в своей основе раму, а если говорить о квадрокоптерах, тот тут это очень критично. При выборе рамы нужно рассматривать три ее характеристики: вес, размер и материал, из которого она изготовлена.
Рама эта сборная и цена ей порядка 20$ (аналоги в районе 15$). Она прочная, легкая и в ней уже есть PBN (распределительная плата), на которой все можно аккуратно и легко собрать. Так же к ней подходит целая куча разнообразных дополнительный прибамбасов.
Дополнительные соображения
- Подвес — чаще всего используется для стабилизации камеры (FPV/Аэросъёмка). Как правило устанавливается под рамой в соответствии с центром тяжести БПЛА. Может крепиться напрямую к раме, либо посредством направляющих. Для стабилизации изображения рекомендуется использовать двух, либо трёх осевые подвесы. Требует увеличения длинны посадочных опор.

- Полезная нагрузка (транспортировочная) — в любительской сфере является чем-то вроде роскоши, так как любой дополнительный вес не только сокращает время полёта, но и приводит к отказу в использовании дополнительных элементов, которые могли бы добавить беспилотнику ключевых функций. При проектировании следует понимать, что транспортировочный кейс должен быть максимально лёгким и в тоже время прочным, а также сам груз должен жёстко крепиться, исключая любое перемещение в полёте.

- Посадочные опоры — несмотря на то, что некоторые БПЛА приземляются непосредственно на раму (как правило исключаются для снижения веса), применение в конструкции посадочных опор обеспечит зазор между нижней частью БПЛА и неровной поверхностью, а также в случае жёсткой посадки принимают удар на себя, увеличивая шансы на спасение таких важных элементов дрона как камера, подвес, АКБ и рама.

- Монтаж — несмотря на то, что проектировать и изготавливать беспилотник значительно проще, чем обычный вертолёт, расположение каждого элемента следует продумать в самом начале процесса проектирования.
Общие рекомендации по монтажу:
- При создании рамы с нуля, важно, обеспечить точное расположение четырёх монтажных отверстий посредством которых осуществляется крепёж моторов к раме.
- Большинство моторов для рам размером от 400 — 600мм имеют одинаковую схему монтажных отверстий, что позволяет использовать раму от одного производителя, а моторы от другого.
- Расположение всех дополнительных компонентов в идеале должно быть симметрично относительно одной оси, что в последствии поможет облегчить поиск и регулировку центра масс беспилотника.
- В идеале контроллер полёта должен быть расположен в центре круга (и как таковой в центре масс) соединяющего все моторы.
- Контроллер полёта обычно крепится к раме при помощи стоек, резиновых демпферов или двухстороннего скотча.
- Многие производители используют одинаковое расположение монтажных отверстий для контроллера полёта (например, квадрат 35мм либо 45мм), но как токового «промышленного стандарта» не существует.
- АКБ достаточно тяжелая, и если центр масс вашей сборки немного сдвинулся, вы можете отрегулировать его переместив слегка батарею.
- Убедитесь, что крепление АКБ немного «играет», но в тоже время обеспечивает надёжную фиксацию батареи.
- Ремни с липучей основой часто используются для фиксации АКБ, тем не менее не будет лишним добавить двухсторонний скотч между батареей и рамой.

Как подключить электронику всего квадрокоптера
Вся электроника собирается как на картинке ниже.
Для соединения моторов с регуляторами потребуется наращивание проводов. Это можно сделать с помощью любого подходящего провода, желательно с силиконовой оболочкой – она не трескается на морозе, вы ведь будете делать на квадрокоптере зимой, не так ли?
Русифицированную инструкцию мне найти не удалось, спасибо моему другу который перевел с английского на русский эту инструкцию для вас.
При подключении моторов, придется продлить провода, методом наращивания. Можно использовать любые подходящие провода, но желательно “силиконовые”. Это позволит им не трескаться при низкой температуре, если вы вдруг захотите запечатлеть на видео новогодний салют зимой.
Итак мы собрали квадрокоптер с камерой своими руками, осталось обучить нашу машину правильно вести себя в полете. Для этого нужно ее “обучить”. Как это делается? Очень просто! Нужно загрузить прошивку на плату через usb. Найти эту прошивку можно на специализированном форуме или на нашем сайте. Когда выйдет статья с прошивкой, тут появится кликабельная ссылка на прошивку.
Если вы еще не умеете летать на квадрокоптере и хотите научиться, то специально для вас я напишу статью на эту тему. Ссылка появится здесь. Там я расскажу об особенностях управления квадрокоптером и на каком быстрее всего научиться летать как профессионал.
Что же касается второго этапа, то тут все просто нужно прикрепить камеру, которую вы сочтете подходящей для себя по цене и по качеству. В видео обзорах вы найдете подходящую камеру, если нет, то пишите в чат, что располагается в левом нижнем углу, другие пользователи вам подскажут.
В завершение этой статьи предлагаю вам посмотреть еще одно видео по сборке квадрокоптера с камерой своими руками.
схема квадрокоптера
Камера
Ух, вот это самая жесть. Камера не всегда нужна, но если она нужна, то нужно внимательно подойти к её выбору. В качестве записывающей камеры стоит использовать экшн камеры- GoPro или её Китайские аналоги (они не сильно уступают в качестве видео, если даже не превосходят «фирму»). Нужно ориентироваться на вес, и на угол обзора. С весом всё понятно, а вот про угол расскажу.
Хочется, чтобы камера снимала красоты мира, но не снимала лучи коптера. Если ты промахнулся и это произошло, то придётся выбрать из двух плохих вариантов.
https://www.youtube.com/watch?v=5UV25lRslOY
Опустить камеру так, чтоб она не задевала пропеллеры. Опускать, скорее всего, придётся сильно, и это вызовет массу проблем с взлётом и посадкой, а также с маневренностью, из-за смещённого центра тяжести.
Вынести камеру вперёд. Тоже беда. Снова сместится центр тяжести (в этом случае можно попытаться уравновесить при помощи АКБ). Ещё сильнее утяжелит конструкцию, ибо придётся придумывать очень мощный фиксатор. Иначе никакими бюджетными виброгасителями делу не поможешь, и эффект желе обеспечен.
Можно попробовать использовать ориентировочную формулу L= 2 * tg (A /2) х D, где:
- L — Область обзора камеры на расстоянии D
- Α — Угол обзора камеры
- D – расстояние до объекта (в нашем случае, до пропеллеров)
Ты получишь диаметр круга, но так как камера снимает прямоугольное изображение, то этот диаметр будет диагональю. Там уж можно примерно прикинуть- задевает, или нет.
Компоненты выбираем, руководствуясь необходимым результатом. Не нужно брать самое лучшее, если в этом нет необходимости. Возможности своей сборки ты можешь приблизительно рассчитать при помощи калькулятора.
Композитчики показали мастерство изготовления корпуса квадрокоптера
Команда «Нанотехнологического центра композитов» (совместный проект «Холдинговой компании «Композит», ФИОП, DowAksa) заняла третье место на Международном этапе конкурса Composite Battle World Cup Kazan-2023, проходившего по стандартам World Skills Russia 29 октября 2023 года. Представители НЦК изготовили один из лучших корпусов квадрокоптера из композитов.
За победу в международном этапе Composite Battle World Cup Kazan-2023, который состоялся 29 октября, боролись 15 команд из восьми стран мира. Первое место заняла команда КНИТУ-КАИ имени А.Н.Туполева, второе – МГТУ имени Н.Э.Баумана, третье – команда «Нанотехнологического центра композитов».
В 2023 году форум был приурочен к 55-летию первого полета человека в космос. Летательные аппараты стали главной темой чемпионата. Участникам Международного этапа в ходе технологического конкурса предстояло изготовить две половинки корпуса квадрокоптера методом вакуумной инфузии. Для этого команды оснастили всеми необходимыми материалами, которые включали: оснастку, чертежи изделия, схему армирования, все необходимые материалы и оборудование. Основными материалами являлись угольная ткань, полиэфирная композиция ПН-609-21М холодного отверждения с отвердителем, жертвенный слой пил-плай. Специально для конкурса было подобрано связующее, которое обладает высокой скоростью отверждения. Это позволило получить готовое изделие уже через 1 час после окончания пропитки.
Наивысших баллов удостоилось изделие, имеющие меньший вес и демонстрирующее наиболее высокие прочностные характеристики в ходе испытаний на прессе. В результате лучшие корпуса квадракоптеров из композитов создали команды «Нанотехнологического центра композитов», КНИТУ-КАИ, МГТУ им. Баумана.
В финале участвовало 15 команд из 8 стран: России, Китая, Индии, Италии, Белоруссии, Германии, Казахстана и Мьянмы. Церемония награждения победителей прошла 29 октября в казанском Дворце единоборств «Ак Барс».
Материалы исполнения бпла/конструкция
Ниже приведены наиболее распространенные материалы исполнения используемые для изготовления рам мультироторных дронов, соответственно список не полный. В идеале рама должна быть жёсткой с минимально возможной передачей вибрации.
Поролон (Пена) — как единственный материал для изготовления рам БЛА используется редко, и, как правило, в комбинации с жёстким каркасом или усиленной конструкцией. Также может применяется в стратегических целях; в качестве защиты несущих винтов (пропеллеров), шасси, не редко выступает в качестве демпфера. Поролон может быть разных типов от мягкого до относительно жёсткого.

Дерево — если в приоритете дешевизна конструкции, то дерево — это отличный вариант, который значительно сократит время сборки и изготовления запасных частей. Древесина достаточно тверда и является проверенным временем материалом. Важно чтобы при изготовлении рамы использовалась идеально прямая древесина (без изгибов и деформации).

Пластик — для большинства пользователей доступен только в виде пластиковых листов. Имеет тенденцию к изгибу и как таковой не идеален. Отлично подходит для изготовления защитного каркаса или шасси. Если вы рассматриваете возможность 3D печати, следует учитывать временной интервал изготовления (возможно проще купить комплект дооснащения UAV frame kit). 3D печать деталей отлично себя зарекомендовала при создании небольших квадрокоптеров.

Алюминий — доходит до потребителя в различных формах и размерах. Вы можете использовать листовой алюминий для исполнения корпуса, либо экструдированный алюминий для реализации лучей дрона. Алюминий не такой лёгкий, по сравнению с углеродным волокном или G10, зато цена и долговечность выступают главными преимуществами материала. Вместо разрушения или трещин, алюминий имеет склонность к изгибу. Для работы с материалом требуется только пила и дрель.

G10 (разновидность стекловолокна) — не смотря на то, что внешний вид и основные свойства практически идентичны с карбоном (углеродным волокном), является менее дорогим материалом. В основном доступен в листовом формате и используется для реализации верхних и нижних пластин рамы. Также в отличии от углеродного волокна, G10 не блокирует радиочастотные волны.

PCB (Печатная плата – пластина из диэлектрика) — по сути аналог стекловолокна, но в отличии от последнего всегда плоские. Иногда используется в качестве верхних и нижних пластин рамы, с целью уменьшения количества используемых деталей (например, плата распределения питания часто встроена в нижнюю панель). Рамы нано/мини квадрокоптеров могут быть исполнены из одной печатной платы включающей в себя всю электронную начинку.

Углеродное волокно — самый востребованный материал из-за лёгкого веса и высокой прочности. Процесс изготовления по прежнему исключительно ручной. Как правило серийно производятся простые формы, такие как плоские листы, трубчатые комплектующие; исполнение сложных трехмерных форм осуществляется на заказ.

Методические рекомендации
Шаг 1: Посмотрите, какие материалы и инструменты для их обработки имеются в вашем распоряжении.
- Если арсенала ваших возможностей не хватает для реализации кастомной рамы или вы просто хотите получить профессиональную раму, подумайте о приобретении UAV frame kit.
- Даже если рама исполнена с использованием необходимого инструмента и из основных материалов, она всё равно может иметь структурно слабые места вызывающие излишнюю вибрацию, либо смещение. Процесс изготовления требует острое зрение и опыт.
- Изготавливая раму самостоятельно, продумайте крепёж всех необходимых элементов дрона; моторы, электроника и т.д.
Шаг 2: Перечислите все дополнительные (вспомогательные) части, которые вы планируете включить в сборку.
- Это могут быть одно-, двух-, либо трех осевой подвес для камеры, парашют, бортовой мини компьютер, полезная нагрузка, дальнобойная электроника (как правило утяжеляет и увеличивает сборку), плавучие средства и т.д.
- Полученный список дополнительных/вспомогательных частей позволит получить представление о размерах беспилотника и рассчитать общую массу.
Шаг 3: Поразмышляйте о предполагаемых размерах рамы.
- Большая рама — необязательно большой потенциал дрона, и не факт, что рама меньших размеров сделает сборку дешевле.
- Дрон построенный на раме размером от 400 — 600мм рекомендуется для начинающих.
Шаг 4: Спроектируйте, соберите и протестируйте раму.
- Если вы приобрели комплект дооснащения (UAV frame kit), то вам не о чем беспокоится касательно прочности, жёсткости и сборки.
- Если вы решили спроектировать и изготовить раму с нуля, важно будет проверить её прочность, вес, и убедится, сможет ли конструкция противостоять вибрации (минимальным изгибом).
- Подумайте об использовании специализированного программного обеспечения для моделирования (многие из них бесплатны, например, Google Sketchup), чтобы спроектировать раму и убедиться в правильности выбранных размеров.
Теперь у вас есть рама и вы можете переходить к следующему уроку.
Монтаж caddx tarsier 4k в стэк, в башню
Пошаговая сборка квадрокоптера своими руками включает самое интересно — монтаж платы камеры в стэк к полетному контроллеру и регуляторам оборотов, а также монтаж модуля камеры на распечатанные на 3D принтере переходники.
Начнем с переходников. Вставляем в них маленькие гайки М2:
Прикручиваем эти переходники к камере винтами подходящего размера на 6 или 8 мм, чтобы все держалось крепко:
Берем боковые панельки, на которые будем закреплять камеру. Берем сверло на 2, примеряем (чтобы камера была по середине) и сверлим по 2 отверстия для крепления переходников, но мне хватило 1 отверстия, так как второе попало ровно в готовое отверстие (решетка):
Теперь переходим к креплению самой платы на башню. Так как плата камеры имеет размер 29 * 29 мм, а монтажные отверстия 20 * 20 мм, то естественно просто так ее не установить. Поэтому, было решено взять информационную панельку от Mamba F405, просверлить сверлом на 2 мм 4 отверстия, закрепить плату и все то дело установить на стандартные 30 * 30 мм. Винты нужны будут также М2 на 12 мм из набора.
Металлическая панелька с синей резиной — это радиатор платы камеры.
Нужно сместить все в одну сторону, иначе потом не закрутите гайками саму панель.
В итоге, получилась вот такая композиция:
Гайки влезут только с одной стороны, но держаться будет все крепко, проверенно неоднократными полетами и падениями на этом дроне. Не забудьте подложить резиновые колечки из набора полетного контроллера (их там много).
Остается смонтировать панельки к переходникам камеры. Откручиваем камеру от переходников, прикручиваем переходники к панелькам и снова закручиваем камеру к переходникам. Устанавливаем на место:
Крепим верхнюю панель к раме:
Монтаж приемника
Приемник используется FrSky XM .
Припаиваем к нему 3 провода:
- Белый — сигнал;
- Красный 5 V;
- Черный — земля.
Провода припаиваете как показано на фото ниже (на обратной стороне есть маркировка):
Сразу отрезаем по размеру термоусадку. В нее спрячем приемник после монтажа.
Просовываете провода под низ полетного контроллера. Припаиваемся к этим контактам:
Должно получиться вот так.
На этом этапе сборки квадрокоптера нужно привязать приемник, пока вы его не спрятали в термоусадку. Берем радио, включаем, настраиваем модельку (даем имя), ставим на строчке Ch. Range — Ch1-16, Mode D16. Доходим до вот этой строчки и нажимаем колесиком на нее: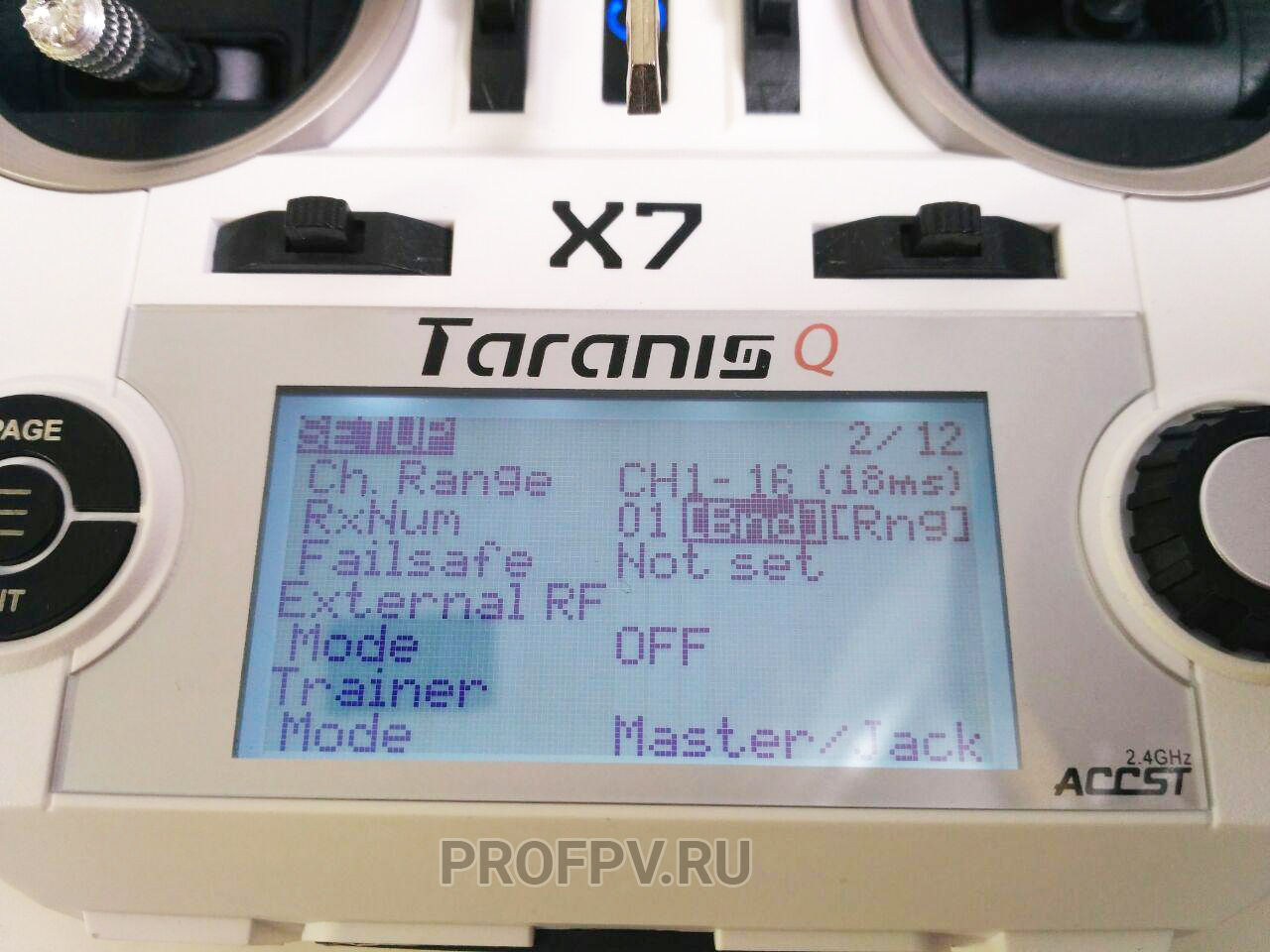
Нажимаем кнопку на приемнике, она находится сверху слева и подключаем полетный контроллер по USB к компьютеру, чтобы подать питание на приемник. Загорится зеленый светодиод, а красный будет моргать. Теперь отпускаем кнопку и снова нажимаем на аппаратуре колесиком на BND, чтобы выйти из режима привязки.
Все, вы успешно привязал приемник.
Надеваем термоусадку, усаживаем ее и заталкиваем приемник под полетный контроллер. Снаружи оставляем антенны. Мы их прикрепим к лучам рамы. Обязательное условие хорошего сигнала: антенны (если их 2), должны составлять угол 90 градусов между собой.
Чтобы у нас все получилось, берем 2 пластиковые стяжки и крепим их таким образом на лучи рамы:
Отрезаем по размеру термоусадку и надеваем. Затем усаживаем зажигалкой или феном:
Получится вот такое:
Таким образом, у вас получится идеальный угол в 90 градусов, а сами антенны прочно закреплены.
Принцип полета
Главная несущая поверхность квадрокоптера – винт. Он имеет определенный профиль с плоской нижней и выпуклой верхней частью. Принцип полета прибора аналогичен с принципом работы вертолета. У квадрокоптера есть оси вращения:
- продольная;
- поперечная;
- вертикальная.
В процессе вращения вокруг продольной оси, летательный аппарат совершает маневр, при котором опускается одна сторона, а противоположная поднимается. Этот маневр называется крен.
Поперечная ось проходит перпендикулярно продольной. При вращении вокруг этой оси летательный прибор поднимает (кабрирование) или опускает (пикирование) переднюю часть.
Вертикальная ось проходит через центр прибора. Вращение вокруг нее называется рысканье.
Главный винт влияет на крен и тангаж, а хвостовой – на рысканье, как в вертолете.
Управление коптером заключается в уменьшении или увеличении количества оборотов.
Каждый ротор производит как тягу, так и крутящий момент вокруг своего центра вращения, а также силу сопротивления, противоположную направлению полета аппарата. Поскольку два ротора вращаются по часовой стрелке, а два – против, чистый аэродинамический крутящий момент и угловое ускорение вокруг оси рыскания равны нулю. Таким образом, необходимость в вертолетном хвостовом винте отпадает.
Волна индуцируется рассогласованием баланса в аэродинамических крутящих моментах, благодаря чему мультикоптер поднимается .
Еще один важный момент в управлении квадрокоптером – газ. Он рассчитывается как среднее арифметическое скоростей всех роторов и измеряется в процентах: чем он выше, тем с большей скоростью прибор направляется вверх.
Моделирование квадролета – сложный процесс, требующий соблюдения баланса массы прибора, мощности двигателя, центра тяжести и сотни других важных моментов. С этим справятся специалисты студии промдизайна KLONA. У нас есть все необходимые материалы: бумага для черчения, карандаш и компьютер, а также лучшие инженеры 🙂
Промышленный дизайн квадрокоптера
Лучшая экспозиция камеры между винтами обеспечивается Х-образной рамой. Ее модификации бывают похожи на космические корабли, жуков и рептилий.
Защитная рама для винтов предупреждает их повреждение, а также является интересным элементом дизайна. Рама может быть сплошной, как у Parrot AR.Drone 2.0 или только с внешней стороны, как у Drone X5SW-1.
Встречаются оригинальные решения, когда рама защищает весь корпус агрегата, как у Sky Walker 1306 4 CH.
Цветовая гамма квадрокоптеров преимущественно белого или черного цвета. Ее можно разнообразить подсветкой или яркими линиями на корпусе.
Jupiter-H2 может находится в воздухе до двух часов, поскольку работает на водороде. Особенности дизайна обусловлены наличием 3-х литрового бака для топлива, расположенного по центру агрегата. Восемь винтов расположенных попарно и оснащены защитной рамой. Дрон способен доставлять грузы весом до 1,25 кг.
На паука-сенокосца похожа разработка ученых из Лаборатории интеллектуальных систем Федеральной политехнической школы Лозанны (EPFL). Научных работников вдохновило оригами. Квадрокоптер окружен складной сеткой из углеродного волокна.
Mavic Pro Platinum напоминает космический корабль будущего, который издает на 60% меньше шума по сравнению с предыдущими моделями. Новинка оснащена двумя камерами и ориентирована для путешественников и фотолюбителей.
3 в 1 – это о Eyedea Pitta. Стартап способен функционировать как селфи-дрон, экшн-камера и камера безопасности. Выглядит он как теннисный мяч черного цвета. К нему отдельно крепится шапочка с четырьмя моторами.
Оригинальные варианты дизайна коптера и защиты для винтов у Simtoo Moment drone и Hover Passport. Первый – клон второго. Только первый дешевле и оснащен закругленной защитой для винтов, а второй – с квадратной защитой и более дорогой.
Промышленный дизайн квадрокоптеров: конструкция
Дроны различаются количеством несущих винтов. На рисунке ниже, с типологией мультикоптеров видно наиболее популярные типы. Чтобы дрон зависал и находился на одном месте, все винты должны крутиться с одной скоростью. Стороны оборота пропеллеров в разных модификациях изображены на схеме ниже.
Разработка квадрокоптеров: возможные конструкции винтов
Ориентация мультикоптера в пространстве определяется 3 показателями:
Чтобы менять направление полета, нужно изменять эти углы с помощью пульта управления квадрокоптером. Корпус пульта должен быть эргономичным и не скользящим.
Показатель скорости вращения винтов квадрокоптера — газ. Чем он выше, тем скорее коптер набирает высоту.
Квадрокоптеры оборудованы обязательными датчиками, которые регулируют положение аппарата в воздухе:
Гироскоп, который измеряет угловую скорость;
Акселерометр, который измеряет ускорение;
Регуляторы скорости, которые управляют сигналом контроллера.
Камера — не обязательная составляющая квадрокоптера. Она может быть встроена производителем или установлена отдельно, пользователем.
Среди всех дронов квадрокоптер является наиболее популярным вариантом для цивильного использования. В свою очередь среди квадрокоптеров наиболее удобной конструкцией является схема, где винты расположены по аналогии буквы «X».
Составляющие части квадрокоптера: разобранная 3D-модель дрона
Процесс сборки
Для сборки квадрокоптера нам понадобятся следующее:
- четыре двигателя для квадрокоптера;
- четыре регулятора оборотов;
- четыре воздушных винта (пропеллера), можно с запасом;
- силовой разветвитель 3,5 мм;
- настраиваемая плата через usb для управления квадрокоптером;
- четыре аккумулятора или более, чтобы получить максимум удовольствия от полета;
- зарядное устройство для подзарядки аккумуляторов;
- устройство радиоуправления квадрокоптером (продается вместе с приемником и передатчиком);
- дополнительные платы для соединения приемника с “мозгами” квадрокоптера;
- провода в силиконовой оболочке для моторов, по две штуки красного и черного;
Это все что касается механизмов и управления.
Чтобы наш квадрокоптер чувствовал себя уверенно в полете, его нужно снабдить неким скелетом, на котором будут держаться все механизмы управления. Существует два подхода к решению этой задачи:
- готовая рама для квадрокоптера;
- рама собранная своими руками;
Чтобы выбрать наиболее подходящий вариант для Вас, нужно понимать некоторые нюансы. Если приобрести готовую раму, то как правило на нее уже можно все прикрутить и можно запускать в полет. Но если, какая-нибудь деталь будет повреждена при падении или неаккуратном использовании, ожидание этой детали займет некоторое время, пока она будет доставлена курьерскими службами на ваш адрес.
Что касается сборной рамы своими руками из подручных средств, то в этом случае нужно будет повозиться, чтобы все ровно вырезать и прикрепить. В случае каких-либо казусов, поломанную деталь можно будет легко заменить.
Самым распространенным вариантом для изготовления рамы из подручных средств, являются пластиковые трубы, которые применяют при строительстве для проводки проводов. Их свойства идеально подходят для крепления всех необходимых элементов управления, двигателей.
С помощью таких труб получается довольно-таки хорошая конструкция, на которой надежно можно закрепить все детали квадрокоптера и и камеру. Итак, у нас почти готов квадрокоптер с камерой своими руками, осталось все это правильно собрать и отправиться на испытательные полеты.
Весь процесс по сборке квадрокоптера своими руками представлен в этом видео. Смотрим.
Ниже представлены фото, которые я нашел в интернете. На них представлены квадрокоптеры с камерой, которые были собраны своими руками из подручных средств.
https://www.youtube.com/watch?v=F8shiw6zY_A
Как подключить электронику к устройству? Соберите ее по инструкции, которая показана ниже.
Чтобы соединить мотор и регулятор, необходимо нарастить провода, для этого используйте силиконовую оболочку, так как она лучше будет функционировать при холодных температурах воздуха.
схема квадрокоптера
Для начала надо определиться – будете использовать стандартную раму или решите изготовить свою.
Покупная рама удобна, но в случае поломки придется ждать, пока приедет запасная деталь. Самодельная рама квадрокоптера собранная своими руками позволяет починить поломку за 20-30 минут, но требует дополнительной работы при изготовлении квадрокоптера.
Наиболее простым вариантом является использование пластиковых труб для проводки проводов. Они легкие и достаточно прочные. К тому же можно купить и поворотные части и крепления к стене, которые подходят для крепления электродвигателей к раме.
В результате получается очень прочная конструкция которая позволяет возить не только электронику самого квадрокоптера, но и камеру для видеосъемки с квадрокоптера.
Вот видео по сборке квадрокоптера из таких труб.
Можно сделать и раму из алюминиевых квадратных трубок.
Существует масса вариантов компоновки и конструкции мультикоптеров, но наиболее распространены именно модели с четырьмя винтами. Поэтому сборка такого квадрокоптера послужит примером для поэтапного обзора процесса сборки. В процессе можно опираться на примерные чертежи квадрокоптеров из сети или составленные самим.
Прошиваем полетный контроллер в betaflight configurator
Зажимаем кнопки BOOT на полетном контроллере и подключаем к компьютеру через USB-кабель.
Открываем Betaflight и переходим на вкладку «Программатор» и выбираем цель и версию прошивки. Выбираем в первой строчке FURYF4OSD (DIAT) и самую последнюю (новую) версию прошивки. Остальное не трогаем. Потом нажимаем «Загрузить прошивку онлайн»:
После того, как скачалась прошивка, жмем «Загрузить прошивку«: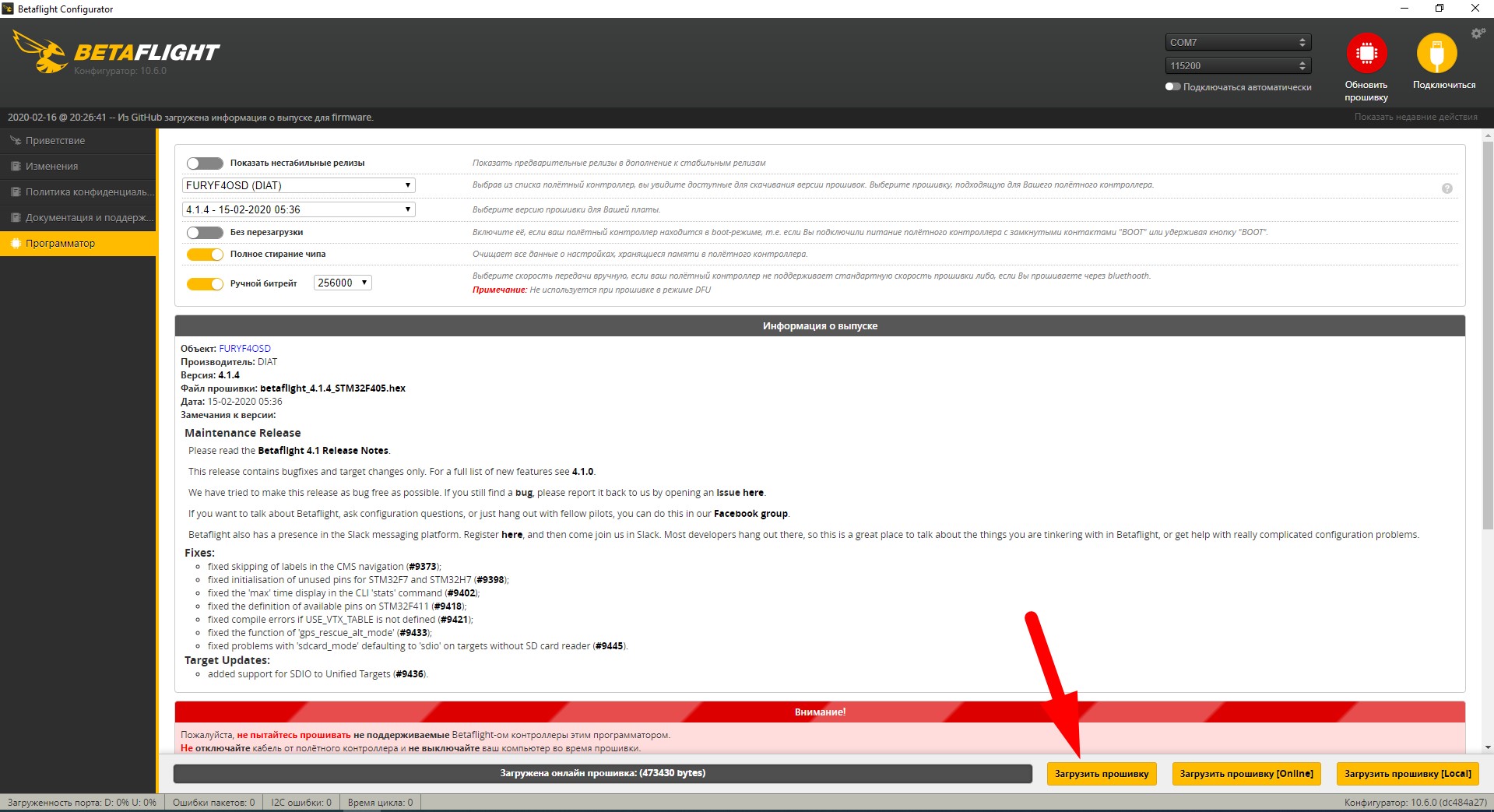
Начнется процесс прошивки, после окончания можно нажать кнопку «Подключиться» в верхнем правом углу.
Прошивка регуляторов оборотов в blhelisuite
Сначала нам нужно открыть BLHeliSuite и прошить регуляторы оборотов. На нужна версия без 32 и на момент опубликования, она называлась BLHeliSuite16714901.
Запускаем и открываем. Сверху выбираем для Cleanflight:
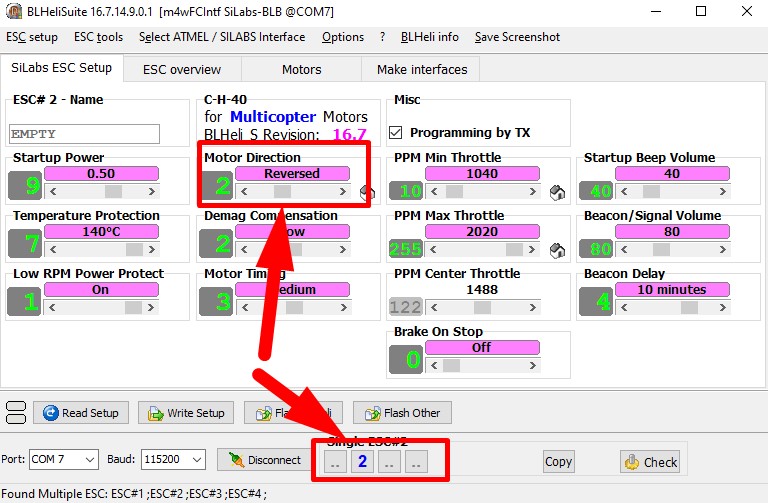
Внизу выбираем нужный порт (чтобы узнать какой, подсоедините USB к полетному контроллеру и посмотрите, какой порт появился в списке. Это же можно посмотреть и в диспетчере устройств) и нажимаем Read Setup, чтобы прочитать настройки.
Не забудьте снять пропеллеры!
Программа скажет, что настройки прочитаны успешно:
Нажимаем Flash BLHeli:
Далее вам система предложит выбрать версию прошивки и прочие схемы, везде соглашаемся и ничего не меняем:
В конце программа предложит прошить второй регулятор оборотов. Делаем все тоже самое, так как их 4 штуки:
В конце программа сообщит, что все 4 регулятора оборотов прошиты:
В этой же программе можно будет менять направление вращения моторов, это нужно, чтобы квадрокоптер смог летать. Вращаться они должны по такой схеме:
В этой программе вы также сможете настраивать музыку, которая звучит при включении и сочинять свою. Программа для тонкой настройки регуляторов оборотов. Но если вам не хочется разбираться в настройках и просто нужно прошить регуляторы, то вам подойдет простое приложение — BLHeli Configurator.
Для простой прошивки регуляторов, читайте статью: Как прошить полетный контроллер и ESC BLhelli. Прошивка квадрокоптера
Здесь все гораздо проще и интуитивно понятно.
Сборка рамы
В качестве базы была выбрана классическая рама 115 мм под названием Martian. Стандартный тип — Гибридный X:
Фиолетовые стойки придают стильности и цвета сборке.
Собирается легко, в наборе идет напильник, которым можно при желании обработать углы деталей, они могут быть острыми. Сначала собирается нижняя плашка с нижними лучами.
Стойки пока не устанавливайте, так как они в дальнейшей сборке будут мешать паять провода. Я поторопился и прикрутил их, после чего снова открутил.
Здесь вам понадобится шестигранник, а также головка для гаек, чтобы затянуть нижнюю часть.
Затем, установите пластиковые стойки для установки башни из регулятора оборотов, полетного контроллера и так далее. С обратной стороны они затягиваются винтами
Для того, чтобы регуляторам оборотов было мягче «сидеть» на стойках, наденьте на них силиконовые демпферные колечки. Они идут в комплекте с рамы:
Затем, вам нужно взять регулятор оборотов, и залудить контакты, к которым будет припаивать провода двигателей. Если впервые паяете, то для начала смажьте паяльным флюсом площадки, затем возьмите припой и тут двумя способами: либо приложите проволоку припоя к контакту и расплавьте паяльником, либо расплавьте припой на жало паяльника и после этого приложите каплю к контакту. После этого установите регулятор(ы) оборотов на стойки:
Типы рам бпла
Трикоптер

Квадрокоптер

Гексакоптер
- Описание: «Гексакоптер» имеет шесть лучей, каждый из которых соединен с мотором. Передней частью гексакоптера принято считать сторону стыка двух лучей, но также передом может считаться и продольный луч.
- Преимущества: При необходимости, конструкция гексакоптера позволяет легко добавить два дополнительных луча и мотора, что позволит увеличить суммарную тягу, в следствии чего дрон сможет поднять больше полезной нагрузки. В случае отказа одного из моторов, допускается вероятность, что дрон сможет осуществить мягкую посадку, а не разбиться. Модульная конструкция рамы. Почти все полётные контроллеры поддерживают эту конфигурацию.
- Недостатки: Громоздкая и дорогостоящая конструкция. Дополнительные двигатели и детали увеличивают вес коптера, соответственно чтобы получить туже продолжительность полёта, что и у квадрокоптера, необходимо устанавливать более ёмкие АКБ.

Y6
- Описание: Конструкция Y6 представляет собой тип гексакоптера у которого в основе не шесть лучей, а три, каждый из которых соединён с парой соосно установленных моторов (итого 6 моторов). При этом стоит обратить внимание, что нижние пропеллеры проецируют тягу вниз.
- Преимущества: Меньшее количество компонентов по сравнению с гексакоптером. Поднимает больше полезной нагрузки по сравнению квадрокоптером. При использовании винтов с встречным вращением исключается гироскопический эффект, как у Y3. В случае отказа одного из моторов, допускается вероятность, что дрон сможет осуществить мягкую посадку, а не разбиться.
- Недостатки: Более дорогой по сравнению с квадрокоптером из-за использования дополнительных деталей, равноценных по стоимости деталям гексакоптера. Дополнительные моторы и детали увеличивают вес коптера, а значит, чтобы получить то же время полёта, что и у квадрокоптера, необходимо будет использовать АКБ большей ёмкости. Как показывает практика, тяга полученная на Y6, немного ниже чем у обычного гексакоптера, вероятно, потому, что нижний винт влияет на тягу верхнего винта. Не все полётные контроллеры поддерживают такую конфигурацию.

Октокоптер
- Описание: У октокоптера восемь лучей, каждый из которых соединен с мотором. Передней частью гексакоптера принято считать сторону стыка двух лучей.
- Преимущества: Больше моторов = больше тяги, и соответственно повышенная избыточность, позволяющая дрону уверенно перемещаться с тяжёлыми и дорогостоящими DSLR камерами.
- Недостатки: Больше моторов = более высокая цена и большой АКБ. Ввиду своей дороговизны актуален только для профессиональной сферы.

X8
- Описание: Конструкция X8 по-прежнему является октокоптером, только не с восемью, а с четырьмя лучами, каждый из которых соединён с парой соосно установленных моторов (итого 8 моторов).
- Преимущества: Больше двигателей = больше тяги, и соответственно повышенная избыточность. Больше шансов мягко посадить дрон в случае отказа мотора.
- Недостатки: Больше моторов = более высокая цена и большой АКБ. Ввиду своей дороговизны актуален только для профессиональной сферы деятельности.

Размер бпла
Беспилотники бывают разных размеров, от «Нано», которые меньше ладони, до крупногабаритных, которые можно перевозить только в кузове грузовика. Для большинства пользователей, которые только начинают познавать беспилотное хобби, оптимальный диапазон размеров, предлагающих наибольшую универсальность и ценность, находится в пределах от 350мм до 700мм. Размером рамы является диаметр наибольшего круга пересекающего каждый из моторов. Запчасти для БПЛА таких размеров имеют широкий спектр цен и самый большой выбор доступных продуктов.


