

- Что делать, если дрон улетел и не вернулся?
- Как снимать видео с дрона?
- Виды калибровок
- Внешний вид
- Грабли
- Если хотите снимать пейзажи и панорамы
- Какое приложение для управления выбрать?
- Калибровка простых моделей квадрокоптеров
- Если не получается…
- Как пожелание…
- Квадрокоптер с gps своими руками. подробная инструкция по сборке. часть 1 — сборка.
- Комплектация
- Матчасть
- Настройка квадрокоптера с gps (inav).
- О продукте
- Первая авария
- Подключение fpv системы квадрокоптера.
- Полет
- Понимание управляющих элементов пульта управления
- Строим квадрокоптер. часть 3. прошивка и настройка.
- Схема подключения периферии к полетному контроллеру omnibus f4 pro v3.
- Тест-драйв
- Управление
- Установка led подсветки на квадрокоптер.
- Установка и подключение gps модуля и компаса на квадрокоптер.
Что делать, если дрон улетел и не вернулся?
Это может быть небольшим глюком геолокации. Если перед полетом вы откалибровали дрон, он не должен улететь далеко. Поищите в ближайших окрестностях, ориентируясь на последние показатели приборов. Если по соседству нет частных владений, над которыми запрещено летать, есть шанс обнаружить дрон в ближайших кустах.
Как снимать видео с дрона?
Продумайте, что именно вы хотите снять, до полета, а не после. Некоторые дроноводы предпочитают включать режим видеосъемки с момента взлета и не выключать до посадки, но без конкретной идеи или сценария съемки вы получите много лишнего материала, который будет трудно монтировать и жалко выкидывать. Никогда не старайтесь использовать весь отснятый материал — творчество заключается именно в выборе лучших кадров.
С другой стороны, может возникнуть ситуация, когда нет ни одного хорошего кадра. Например, вы облетели по кругу красивый маяк, но во время полета резко поменялся ветер или вы ошиблись в управлении, камера дрона часто дергалась, плавность съемки была потеряна и теперь отснятое выглядит некрасиво. Не спешите выбрасывать материал, попробуйте исправить на монтаже. Например, если камера дергалась в полете, ускорьте воспроизведение. Так любой рывок станет незаметен.
Совет: во время монтажа накладывайте на видео музыку. В идеале каждый поворот дрона должен поддерживать ритмический рисунок мелодии. Это поможет создать дополнительное настроение. Например, дрон пересекает горный хребет, а затем открывается вид на просторную долину, озеро или море. Постарайтесь, чтобы этот момент совпал с замедлением в музыке или паузой. Это придаст сюжету дополнительную эмоциональную глубину.
Виды калибровок
Существует два способа настройки, триммирования и калибровки квадрокоптеров:
- Механический. Если отклонения дрона в полете совсем незначительные, можно вручную подкрутить регулятор тяги, расположенный между сервоприводом и тарелкой конструкции.

Механическое триммирование проводят на земле, а после пробного полета при необходимости повторяют - Автоматический. Если дрон отклоняется от курса сильно и заметно, его настраивают при помощи пульта. Специальный триммер переводят в положение, противоположное крену аппарата.

Автоматическую настройку осуществляют непосредственно в воздухе
Перед автоматической калибровкой дрона рекомендуется внимательно изучить инструкцию, чтобы разобраться в устройстве пульта управления и самого аппарата.
Внешний вид

Грабли
В случае с корректировкой мощностей моторов необходимо не допускать слишком низких и слишком высоких мощностей, при которых стабилизация работает неверно.
С одной стороны, существует минимальная мощность, которую уменьшить нельзя, или моторы просто остановятся. С другой, уменьшение мощности может быть необходимо для правильной работы алгоритма. Если мощность (throttle) уменьшить слишком сильно, ПИД может «зашкаливать» в нижнюю сторону. Чтобы решить эту проблему, мы ограничиваем доступные пилоту мощности.

Другая опасность — влияние побочных вибраций от моторов на 

Если хотите снимать пейзажи и панорамы
Попробуйте начать с DJI Мavic 2 Pro. Чтобы научиться его пилотировать, вам придется приложить больше усилий (и потратить больше денег), но зато потом сможете направлять дрон между елок и опор мостов, исследовать с воздуха крыши и кроны деревьев, облетать естественные препятствия, чтобы увидеть, что за ними скрывается, на расстоянии до 10 километров от себя. При этом можно еще взлететь на несколько километров ввысь.
Стоимость модели начинается от 126 тысяч рублей. Это немало, но рынок предлагает и более бюджетные модели по цене от девяти тысяч рублей. Чтобы определиться с выбором, посмотрите обзоры на Ютубе.
Итак, вы выбрали и купили свой первый дрон. Прежде чем его запустить, проверьте, что карта памяти установлена, аккумуляторы полностью заряжены и их несколько. Звучит банально, но именно об этом легко забыть.
Обязательно изучите инструкцию: там будет указано, как запускается функция аварийного самоотключения (CSC). Она есть во всех устройствах, и везде может быть разная комбинация кнопок и джойстика. Например, на дронах моделей Phantom 3 или 4 аварийное отключение двигателей происходит при переключении двух джойстиков по углам контроллера вниз. Не зная об этом и управляя дроном в экстренной ситуации, вы можете случайно отключить и уронить его, и хорошо, если не кому-нибудь на голову. В общем, не стоит учиться управлять аппаратом методом «научного тыка».
Какое приложение для управления выбрать?
Приложений для запуска дронов много, но мы рекомендуем универсальное и прекрасное во всех смыслах UAV Forecast. Программа сразу покажет и температуру воздуха, и скорость ветра на конкретной высоте, даст прогноз погоды на ближайшее время и отразит на дисплее вашего смартфона или планшета карту с зонами, в которых запрещены полеты. В приложении даже есть палитра для дальтоников!
Данные UAV Forecast подходят для любой модели летающего устройства.
Перед каждой поездкой за границу не забудьте изучить, какие в конкретной стране правила перевозки и использования дронов. В большинстве государств, включая Россию, запуск запрещен только в определенных местах: зоны аэропортов, охранные зоны, частные владения, национальные парки, места проведения массовых мероприятий и тому подобное.
В отдельных странах обязательно требуется заранее регистрировать дрон, если его вес свыше 250 граммов. Может потребоваться оформление страховки гражданской ответственности.
В некоторых странах, например в Индии, требуется на месте пройти обучение и получить лицензию на управление дроном. Так что в короткую поездки в такие государства брать с собой дрон бессмысленно.
Многие путешественники сталкивались с тем, что во Вьетнаме сотрудники таможенной службы могут попытаться изъять дрон, пообещав вернуть его, когда вы будете выезжать из страны. Если маршрут не кольцевой — условно говоря, прилетели в Ханой, а вылететь хотите из Хошимина, — дрон останется в подарок таможенникам. Здесь поможет только сила убеждения и ссылки на внутренние нормативные акты Вьетнама, которые позволяют провозить и использовать любительские дроны на территории этой страны.
Важно также изучать правила провоза и транспортировки дронов на сайте конкретной авиакомпании, самолетом которой планируете путешествовать. Как правило, они стандартные: квадрокоптеры можно перевозить в багаже или в ручной клади. В последнем случае аппарат будет лучше защищен от повреждений. Важно перевозить батареи вместе с дроном или герметично упаковывать запасные аккумуляторы в багаж.
Информацию о правилах пилотирования и применения дронов в различных странах мира ищите на специальных регулярно обновляемых сайтах.
Если вы все-таки решите запустить дрон там, где нельзя, и вас застукают на месте правонарушения, самым безобидным последствием может стать штраф. Однако правоохранители могут еще и начать ловить или сбивать ваш коптер, используя для этого специальные технические средства. Самые распространенные из них — «глушилки», или блокираторы, дронов, то есть специальные устройства, создающие и распространяющие радиопомехи на определенное расстояние в заданном частотном диапазоне. Обычно эти устройства применяются в зонах, где полеты запрещены.
Чтобы не столкнуться с «глушилкой», вспоминаем полезные приложения с обозначением запретных зон. Но дрон все равно залетел в одну из них? Без паники. Ситуация сложная, но не безнадежная. Отключайте спутники и возвращайте дрон на базу в ручном режиме. Включите воображение и представьте себя настоящим пилотом на войне. Вас обстреливают, уже есть повреждения, но нужно дотянуть до своих.
В награду получите потрясающие виды мест, которые обычно снимать с дрона запрещено. Вот например, что снимают увернувшиеся от «глушилок» коптеры над природным памятником «Двенадцать апостолов» в Южной Австралии.
Некоторые страны для борьбы с нарушающими квадрокоптерами используют совершенно экзотические методы: специально обученных орлов, сетки, расстреливающие дрон базуки.
Калибровка простых моделей квадрокоптеров
Чтобы откалибровать квадрокоптер перед первым запуском, нужно перевести оба стика пульта управления в нижнее положение, а затем влево до упора. Когда прозвучит длинный звуковой сигнал, а светодиодная подсветка на дроне перестанет мелко моргать, дрон откалиброван и готов к запуску.
Это важно:
Если после калибровки датчиков, квадрокоптер все-таки тянет в сторону, для его качественной стабилизации нужно произвести триммирование (точную настройку).
Для этого используем триммеры снизу и слева от правого стика на пульте ДУ.
Если квадрик уводит влево, кликните несколько раз на кнопку триммера «вправо». Если замечаете крен вправо, то нажмите на триммере «влево» несколько раз. По аналогии настройте полет дрона вперед/назад.
В идеале, при запуске двигателей дрон должен подниматься в воздух и удерживать положение «без заносов». Добиться этого можно только в закрытом помещении или в абсолютно безветренную погоду.
Опытные пилоты производят триммирование в полете (нужно поднять дрон на высоту не менее 0,5 метра). Как начинающий летчик, можете пробовать настроить коптер на земле. То есть взлететь, увидеть в какую сторону заносит дрон, приземлиться, сделать несколько кликов на нужную кнопку триммера, а затем снова подняться в воздух, чтобы ощутить разницу. И так до тех пор, пока квадрокоптер не зависнет идеально в воздухе.
Медленно, но уверенно.

Если не получается…
Если точная настройка квадрокоптера (триммирование) не дает нужного эффекта, возможно дело не в гироскопах. Может случиться, что двигатели расположены не симметрично или повреждены лопасти. Еще одна возможная причина – какому-то из моторчиков не хватает тяги, чтобы ровно поднять дрон в воздух. В этом случае не обойтись без опытного помощника или даже мастера.
Как пожелание…
Не спешите выжать из нового квадрика все соки в первый же день полетов!
Помните, что первые запуски, это для него всего лишь тестирование и проверка работоспособности, а для вас – проверка на выдержку.
Поэтому, не спешите, иначе рискуете разочароваться до того, как новинка принесет вам наслаждение.
Квадрокоптер с gps своими руками. подробная инструкция по сборке. часть 1 — сборка.
Давайте продолжим тему сборок квадрокоптеров своими руками. В прошлый раз я построил шустрый гоночный квадрокоптер. В этот раз построим бюджетный квадрокоптер, на борту которого будет барометр для вычисления высоты и датчик GPS с компасом для реализации различных функций, таких как автоматический возврат домой, полеты по точкам, удержание высоты и позиции. Но теперь дрон будет на прошивке INAV.
Сразу перечислю все комплектующие, использованные в проекте (Все ссылки ведут на алиэкспресс. Переходя по ссылкам Вы поддерживаете проект! Спасибо Вам за это!):
Полетный контроллер — дешевый клон очень
распространенного ПК Omnibus F4 V3 Pro. Имеет на борту 3 UART, возможность подключения приемника по SBUS и IBUS, разъем для подключения GPS модуля, барометр и слот карты памяти для записи параметров полета.
Рама для квадрокоптера. Не менее распространенная Martian II в размере 250 мм. Бюджетная, достаточно прочная и очень вместительная.
Позволяет установить по желанию как 5-ти дюймовые, так и 6-ти дюймовые пропеллеры.
Моторы я выбрал бюджетные Readytosky RS 2205 2300kv. Регуляторы оборотов — Little Bee 30А.
Регуляторы оборотов — Little Bee 30А. Регуляторы оборотов — Little Bee 30А.
Регуляторы оборотов — Little Bee 30А.Курсовая камера — Foxeer Monster Pro.
 Видеопередатчик— AKK K33 5,8 GHz.
Видеопередатчик— AKK K33 5,8 GHz. Видеопередатчик— AKK K33 5,8 GHz.
Видеопередатчик— AKK K33 5,8 GHz.GPS модуль — BN-880 с компасом.

Приемник — модернизированный Flysky fs-ia6b (14-канальный с RSSI). Купить можно здесь.
Комплектация
Разработчик поставляет на рынок две версии комплектации. У них не имеется официального названия. Поэтому пока можно определить их как малый и большой вариант комплектации. Большой отличается наличием запасной батареи и специальным переносным чехлом темного и светлого серого оттенка.

В малый комплект войдут:
1) Дрон XIRO Xplorer Mini
2) Интеллектуальная батарея 3S 11.4В 1650мАч 18.81Втч LiPo
3) 4 × несущих винта
4) 4 × защиты несущих винтов
5) Зарядное устройство
6) Блок питания 220В для ЗУ
7) USB кабель
8) Отвертка
9) Инструкция и иллюстрации по первому запуску

Матчасть
Определим невязку — разницу между требуемым и реальным значением некоторой величины:

— требуемое значение величины (угол с джойстика),

— текущее значение величины (угол с датчика).
Зададим момент сил для угла
где

— пропорциональная,
— интегральная,
— дифференциальная составляющие.
Знак минус говорит о том, что при положительных

воздействие направлено против отклонения.
В чём смысл этой формулы? Напишем уравнение динамики, положив 

— момент инерции.
Для простоты уберём интегральную составляющую (

где
Т. е. чем больше пропорциональная составляющая, тем более «резкой» будет реакция на воздействие (больше амплитуда). Чем больше дифференциальная составляющая, тем быстрее будет происходить затухание (больше декремент).
Из модели затухающих колебаний получаем выражение для коэффициента затухания:
Из возможных решений уравнения нам подходит режим, близкий к критическому (граница апериодичности,

) — нет отрицательного «перелёта» графика, переходный процесс короткий. Как видно, критический режим задается всего одним соотношением на коэффициенты ПИД-регулятора.
Интегральная составляющая устраняет статическую ошибку. Пусть невязка 

Более подробный анализ уравнения ПИД-регулятора можно найти в других статьях: раз, два.
Настройка квадрокоптера с gps (inav).
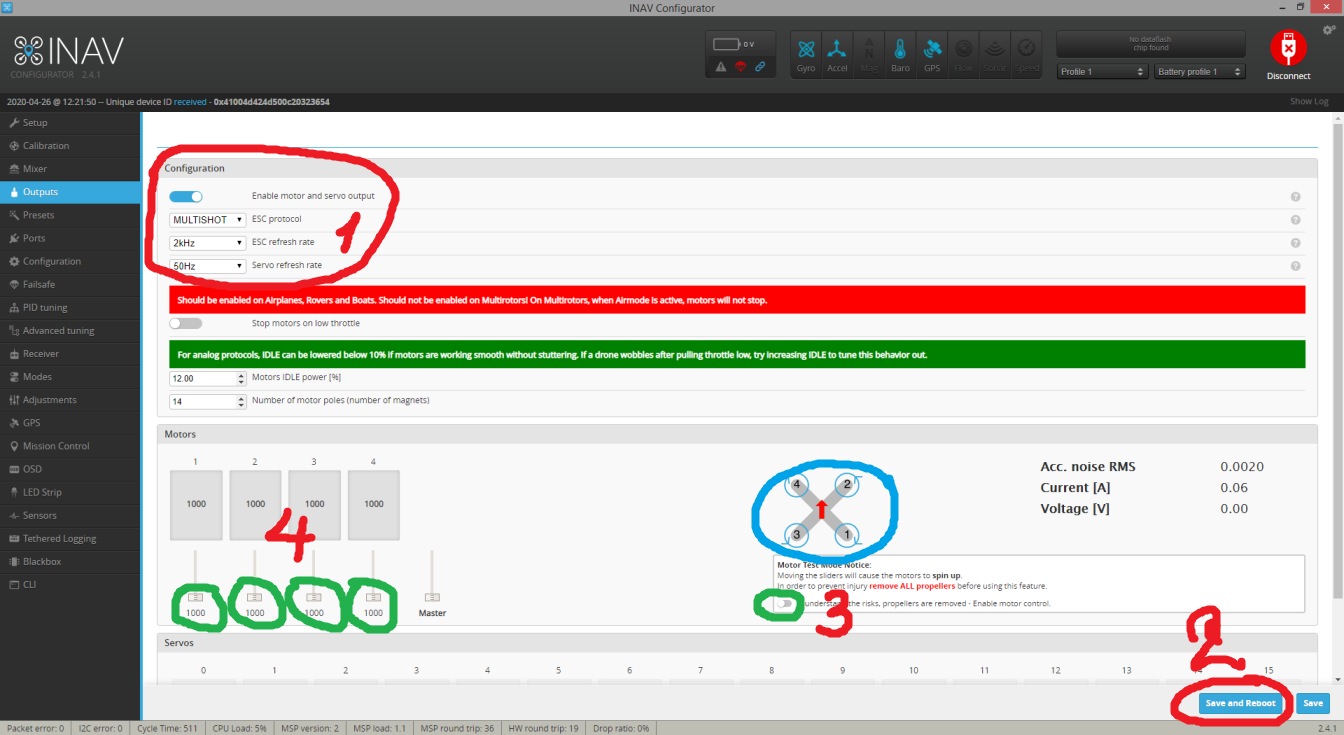
Далее я опишу Вам самые основные настройки квадрокоптера (в основном скриншоты), которых будет достаточно для того, чтобы он без проблем полетел. На некоторых заострю ваше внимание. Чтобы наиболее полно изучить все настройки INAV рекомендую обратиться к документации на GitHub.
Ну вот мы прошили квадрокоптер, подключили к INAV Configurator. Первая вкладка, которую мы увидим — Setup и на ней будут видны два красных крестика, говорящие нам о том, что нужно откалибровать акселерометр и, в дальнейшем, компас.
Вообще блок Pre-arming checks на этой вкладке показывает все ли в порядке с подключениями и настройками. Если по какой-либо причине после всех настроек у вас квадрокоптер не будет Arm, то идите на эту вкладку и выясняйте причины.
Идем на вкладку Configuration и выбираем AUTO там, где указано. Здесь и далее после каждой операции не забываем сохранять и перезагружать.

Если вы все сделали правильно, то на вкладке Setup в блоке Pre-arming checks все будет зелёное.
Вкладка порты (инициализируем IBUS и GPS модуль).

к этой статье. В ней подробно описано как изменить направление вращения мотора в BLHeli Configurator.
 MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать. MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
О продукте
Беспилотник Xplorer Mini отличается высоким качеством. Конструкция отличается прочностью и отсутствием скрипучих пластиковых элементов. Для того чтобы сломать дрон, придется приложить немало усилий. Лучи складываются без всяческих затруднений, ход тугой и во время пилотирования фиксация характеризуется небольшим щелчком.
Обращает на себя внимание оформление беспилотника. Наиболее привлекательным элементом является панель, закрывающая аккумулятор. Она выделяется желтым структурным рисунком. И если цвет панели наскучит и захочется ее поменять, производитель предоставляет такую возможность.

В 2023 году оформление XIRO Xplorer Mini стало лучшим, за что разработчик получил премию Red Dot Design Award 2023. Она выдается в немецком городе Эссен институтом дизайна.
Первая авария
Слишком большая дифференциальная составляющая на практике приводит к автоколебаниям, чего не должно быть в теории. Почему? Уберём все составляющие, кроме дифференциальной, и решим уравнение:


т. е. величина
превращается в линейную комбинацию
и её производной. То же самое происходит с моментом сил, который также является гармонической функцией в этом примере. При определенных

коэффициенты линейной комбинации могут быть такими, что возникнут незатухающие автоколебания.

Также результат работы составляющих ПИД приходится ограничивать по модулю. Иначе значение
Компромиссом является установка не слишком маленьких коэффициентов в совокупности с введением ограничения сверху на все три составляющие: пропорциональную, интегральную и дифференциальную.
Стоит сказать, что реальная коррекция в почти горизонтальном положении — около 1–2 попугаев процентов мощности моторов (полётная мощность около 60%).

Рассмотрим решение уравнения второго порядка (1), которое в одном из случаев является затухающей синусоидой.
На практике действительно получается что-то похожее (пример справа). Для демонстрации коэффициенты специально ухудшены для увеличения времени затухания. Оригинальную прошивку ESC пришлось заменить, т. к. она вносила существенную задержку, из-за которой математическая модель плохо описывала реальную систему.

Поскольку
Подключение fpv системы квадрокоптера.
Во-первых, удостоверьтесь в том, что питание в 14,0-16,8 вольт (4-х баночный аккумулятор) подходит для вашей камеры и видеопередатчика.
Во-вторых, нужно спаять перемычку между контактом RAM на плате и контактом VCC (см. п.2 на схеме подключения электроники). Таким образом, мы подадим напряжение аккумулятора на все контакты, обозначенные символами RAM на плате контроллера.
Если же вам понадобиться напряжение 5 вольт на контактах RAM, то их нужно спаять каплей олова с контактом 5V. Вот как выглядит перемычка.




Полет
Запустив дрон, не стремитесь сразу взмыть в облака. Для начала поднимите коптер на 5–10 метров вверх, чтобы он не пропадал из поля вашего зрения. Посмотрите, насколько устойчиво аппарат зависает в воздухе, попробуйте ручки управления. Визуальный контакт в этот момент очень важен: так вы отследите задержку между вашими действиями и реакцией дрона, привыкните к небольшому отставанию и научитесь заранее планировать свои действия и траекторию полета.
Для новичка в пилотировании небольшая задержка ответа — благо, а не недостаток. У спортивных моделей дронов FPV (first person view) реакция молниеносная, и справляться с управлением там в разы сложнее.
Когда вы немного освоитесь с ручками управления, заставьте дрон пролететь по прямой вперед и назад. Потом попробуйте развороты на месте, затем сделайте пару кругов на невысокой скорости. Первый круг нужно пролететь, сохраняя визуальный контакт с дроном, второй круг — наблюдая за ним только через экран смартфона или планшета.
Поднимитесь еще чуть выше и внимательно осмотрите окрестности. Вообще так можно делать всегда: это поможет определить дальнейший маршрут полета и план съемки. С небольшой высоты запишите пробное видео или сделайте фото.
А теперь, как бы вам ни хотелось еще полетать, совершите посадку в автоматическом режиме, чтобы почувствовать контроль над вашим аппаратом. После этого можно запускать его повторно и тогда уже тренировать управление и посадку в ручном режиме.
Повторив такие операции многократно, вы постепенно приучите себя к предполетной подготовке, изучению местности, переходу с автоматического на ручное управление.
Этими процедурами нельзя пренебрегать даже при съемке в хорошо знакомых местах, где вы уже раньше летали. Резкий порыв ветра, внезапно окружившая дрон стая птиц — на все внезапные ситуации нужно уметь оперативно реагировать, именно поэтому постарайтесь освоить и ручной режим управления.
Понимание управляющих элементов пульта управления
Пульт управления (он же передатчик) очень похож на обычный джойстик для консолей и у него 2 основных элемента управления:
- Левый стик — газ и рыскание по оси
- Правый стик — тангаж вправо-влево и вперед-назад
Вот схема, чтобы вы поняли все наглядно:

И сразу англоязычная версия схемы:
Подробнее о значениях — все значения имеют стандартные аббревиатуры на английском языке, я на нем их и приведу, но с расшифровкой:
- Throttle — это газ. Увеличиваем газ (поднимаем стик вверх) квадрокоптер полетит вверх, опускаем стик, газ уменьшается и квадрокоптер будет опускаться
- Yaw — вращение по оси, рыскание. Наклоняете левый стик влево — дрон начинает крутиться по оси влево и наоборот.
- Roll — элерон влево или вправо. На картинке не стал писать это слово, так вы запутаетесь, если, конечно вы не пилот авиации. Наклоняет квадрокоптер влево или вправо.
- Pitch — тангаж вперед или назад. Наклоняет дрон вперед или назад, чтобы он летел вперед или назад.
Вот как это выглядит на примере самолета:
На пультах есть обычно еще куча всяких тумблеров, но они программируются под конкретные задачи, например, для переключения режимов полета и так далее.
Строим квадрокоптер. часть 3. прошивка и настройка.
Всем привет!
Пожалуй, начну свой пост с обращения к аудитории Пикабу в целом и к 661 человеку (кто до сих пор со мной, несмотря на моё поведение) в частности. Поздравляю всех с Новым годом и приношу свои искреннейшие извинения за то, что столько времени не постил, а также благодарю за терпение =)
По правде говоря, какое-то время назад меня начала сильно мучить совесть. Отдельное спасибо за это товарищам: @Bakut8536, @viktorq, @bacara1138 и @mr.Shify за то, что пинали меня, побуждая к действию.
Внимание, впереди очень много картинок))))
С предыдущего поста прошло очень много времени, теперь мой коптер выглядит вот так:
Что изменилось:
1. Рама – поменял на более легкую: во взлетной массе коптер потерял примерно 180 граммов, плюс развесовка стала более сбалансированной (аккум цепляется под низ, между штангами, @HellKern, я поправил =) теперь при прикреплении подвеса аккум можно сдвинуть к хвосту, и баланс всегда будет оптимальным);
2. Регуляторы – да, многие говорили, что г@#но, и я сам в этом убедился: один очень быстро начал перегреваться и сгорел. По рекомендации @OTR1UM взял Hobbywing Opto 20A – работают без нареканий.
3. Моторы – на одном (или двух) нашел косяк изоляции (разное сопротивление между фазами), заменил на новые.
Остальное (чего немного) осталось тем же.
Итак, всё же часть третья. Колдовство с контроллером.
Для того, чтобы научить нашу “птичку” летать, нужно залить в контроллер прошивку и провести первичные калибровки. Для APM мы будем использовать программу Mission Planner.
Качаем, устанавливаем. Нужные драйвера должны встать сами вместе с программой.
Запускаем планнер.
Так выглядит его стартовый экран. Пока все параметры в нулях. Подключаем коптер через USB, но НЕ НАЖИМАЕМ кнопку Connect. В выпадающем списке портов должен появиться новый. Также важный момент: подключайте напрямую к компу, а не через хаб.
У меня в компе своих два, поэтому новым оказался COM4. У вас может быть какой-либо другой.
Нажимаем кнопку Initial setup, а затем кнопку Wizard.
Открывается окно, в котором у нас пойдет первичная настройка.
Шаг 1. Выбор типа нашего дрона. Здесь выбираем Мультиротор (думаю, без комментариев).
Шаг 2. Выбираем композицию. У меня классический типа X, квадрокоптер.
Шаг 3. Указание COM-порта. Здесь указано, что в диспетчере устройств COM-порт будет указан как “Arduino Mega 2560” (для APM) или “PX4 FMU” (для Pixhawk). Я заглянул в диспетчер – да, на 4 порте висит Arduino Mega 2560. Выбираем COM4, жмём Next, заливается прошивка.
При прошивке программа может сказать, что плата устаревшая, поэтому будет залита последняя выпущенная прошивка. Жмем ОК.
Шаг 4. Выбираем более конкретную раскладку коптера. Почему-то тот, что слева внизу, появился во второй раз о_О. Мой вариант – классический X-квадрокоптер.
Шаг 5. Калибровка акселерометра.
Если у вас будет включен звук, то каждую манипуляцию вам будет наговаривать экранный диктор. Сначала было стрёмно, потом смешно))) Нажимаем Start. Появится надпись:
Нужно будет поочередно расположить коптер в 6 разных плоскостях (после каждого замера жмем Continue):
– горизонтально (ставим на стол или на пол)
– на левый бок (желательно прислонить его к чему-либо вертикальному, так будет точнее), я прислонял к компу или шкафу. Аналогично для правого бока, носа и хвоста.
– кверху брюхом (переворачиваем и прислоняем к столу снизу).
Главное – не делать больших задержек (больше 20с примерно) между замерами, иначе придется калибровать заново.
Как сделали – переходим к компасу.
Шаг 6. Калибровка компаса. Компас (у меня совмещенный с GPS) должен быть в “боевом” состоянии (то есть установлен и зафиксирован).
Дальше жмем Live Calibration и начинается веселье: нам нужно этим самым компасом вокруг коптера описать сферу. То есть, мы держим коптер и поворачиваем его в разных плоскостях.. На экране на координатном пространстве будет рисоваться сфера:
И таким манером крутим коптер, пока не наберется нужное количество точек. Чтобы быстрее набралось – стараемся накрыть белые точки. Появится подобное окошко – всё хорошо, идем дальше:
Переходим к питанию:
Шаг 7. Вводим данные по тому, как у нас идет питание. У меня такая же девайсина, как на картинке, для нее настройки я указал. Выставляем также емкость аккумуляторов.
Следующим шагом программа спросит, есть ли сонар – пропускаем и переходим к радиоаппаратуре. Видим вот такое:
Затем включаем пульт (процедуру привязки и настройки аппы лучше гуглить отдельно для своей аппаратуры и приемника) и жмем Continue:
Шаг 8. Проверка аппаратуры: дергаем стики в разные стороны, реагирует ли аппаратура на дергания стиков, и правильно ли их воспринимает. Правильным результатом будет Throttle на левом стике вперед-назад, Yaw на нем же вправо-влево, Pitch на правом вперед-назад, и Roll на нем же вправо-влево. Конечные значения должны быть примерно 980-1000 для минимума, 2000-2020 для максимума. Если у вас не так – жмем Calibrate Radio и гоняем все стики в крайние положения, затем жмем ОК.
У меня на 5 канале стоит шестипозиционная комбинация двух стиков – это я делал для полетных режимов. Это тоже берем из мануалов к своей аппаратуре. Для начала можно не морочиться и просто назначить три режима одному тумблеру.
Шаг 9. Установка режимов. Я себе поставил набор, как на картинке.
RTL – это возвращение домой и посадка (на случай, если потеряю его в небе, один раз этот режим спас мне коптер). Коптер выходит на высоту 15 метров, на ней возвращается по прямой к координатам вылета, спускается на высоту 3 метра, затем переключается в режим плавной посадки;
Land – это просто посадка (чтобы с непривычки не ахнуть его об землю);
Loiter – режим удержания точки;
Althold – режим удержания высоты;
Stabilize – самый обычный режим полета со стабилизацией по горизонту.
Зеленый курсор показывает, какой режим сейчас выставлен на аппаратуре (именно поэтому у меня такой бардак в их последовательности). Меняем режим на аппаратуре – выставляем то, что предназначается текущему положению назначенного переключателя. В конце проходим по всем, проверяем и жмем Save Modes.
Шаг 10. Проверяем настройки. Если у вас рабочий стол не у окна, то, скорее всего, GPS найден не будет, так что первая плашка останется красной. В противном случае – будет зеленой.
Проверяем, не установлены ли у нас пропеллеры и пробуем заармить (запустить) моторы. Для этого стики на аппаратуре уводим до упора вниз и друг к другу.
К слову, для дизарма (отключения) моторов делаем тоже самое, но стики направляем друг от друга.
Последняя плашка должна стать зеленой. Жмем Next.
Шаг 11. Настройка Failsafe. Здесь мы выбираем поведение коптера в нештатной ситуации (садится батарея, потеряна связь с наземной станцией, потеряно значение “газа”).
В первом случае я даю установку на возврат домой,
во втором – смысла никакого, т.к. у меня не наземная станция,
в третьем – отключение передатчика (аппаратуры) – тоже возврат домой.
Шаг 12 для тех, кто боится потерять коптер до получения необходимых навыков – настройка “купола”, за который коптер не сможет улететь.
Здесь всё просто – при установленной галке ставим параметры, ограничивающие полет: высота, радиус, высота, на которой он будет возвращаться домой в режиме RTL.
На этом первичная настройка контроллера закончена. Жмем Next до упора и отключаем коптер от компьютера.
К настройкам можно будет всегда вернуться в разделе Initial setup (для этого коптер подключаем по USB и жмем Connect, если не поключается, играем скоростью – это параметр в выпадающем списке рядом с COM-портами) в меню Mandatory Hardware:
Теперь пара слов о калибровке регуляторов. Эта процедура нужна для того, чтобы ваши регуляторы понимали, какому положению стика газа соответствуют определенные обороты моторов. ВАЖНО: калибровку проводить только со снятыми пропеллерами!
1. Включаем пульт и переводим стик газа в крайнее верхнее положение.
2. Подключаем аккумулятор. Контроллер будет моргать желтым, красным и синим.
3. Отключаем аккумулятор и снова подключаем. Регуляторы издадут несколько серий сигналов:
сначала количество банок аккумулятора (у меня 4), затем ещё дважды (это сигнал, что максимальный газ записан).
4. Переводим газ в крайнее нижнее положение. Регуляторы дадут длинный сигнал, подтверждая, что минимальный газ записан и калибровка окончена.
5. Плавно поднимаем газ – моторы начнут вращаться, набирая обороты по мере набора газа.
На этом всё! Всем ещё раз спасибо за терпение и внимание!
Искренне ваш,
Схема подключения периферии к полетному контроллеру omnibus f4 pro v3.
Еще немного фото квадрокоптер с GPS.
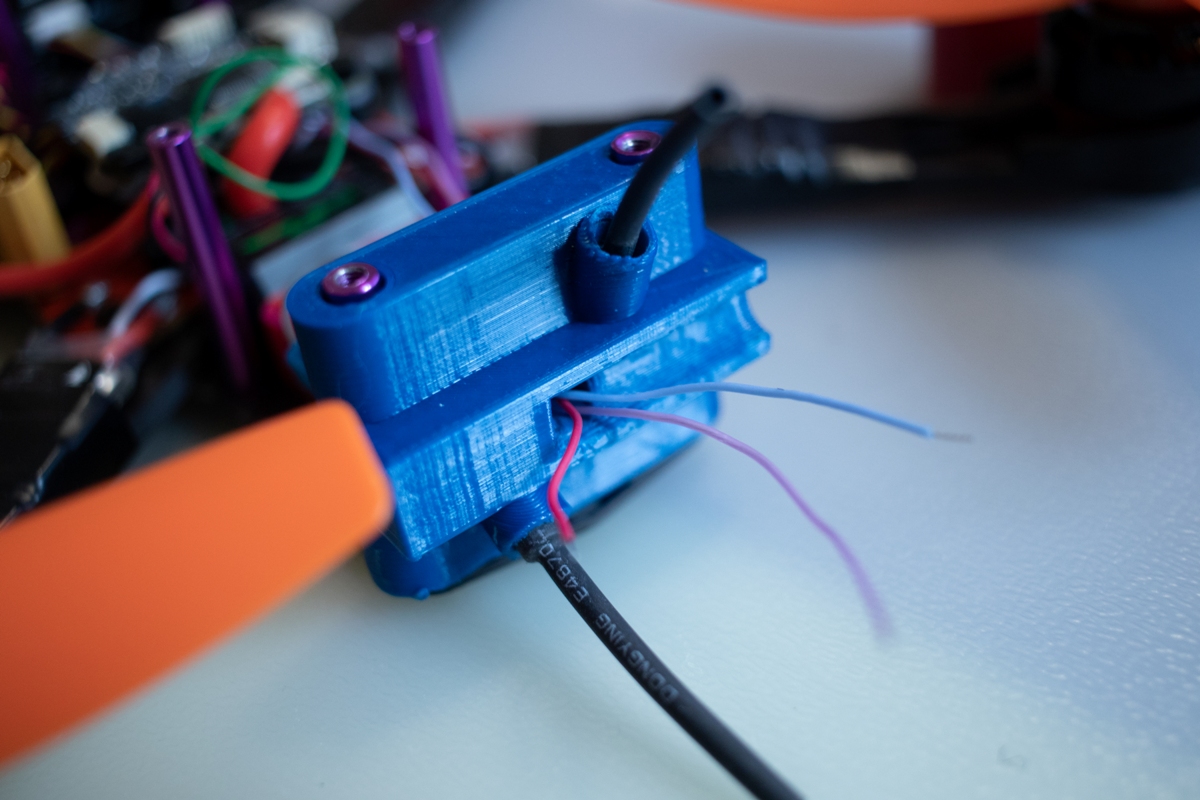
Кстати, отверстие в задней стенке не просто так. Сразу же, как мне придет LED панель, установлю ее сюда. Покупал вот такую.
Во второй части статьи пробежимся по основным настройкам квадрокоптера. Часть 2.
Тест-драйв
Во время тестовых испытаний дрон XIRO Xplorer Mini продемонстрировал свои лучшие качества. С помощью двойного позиционирования даже в сильно ветреную погоду бесприлотник отличается точностью и стабильностью.
Управление интуитивное и простое. На все виртуальные команды реагирует точно и без труда. Пользователь может воспользоваться тремя вариантами управления:
Без нареканий во время теста производится полет в режимах Follow me и Follow snap. В первом из них можно произвести дополнительную активацию опции кругового облета Self-Circling. С ней беспилотник совершает круговой облет мобильного девайса без всяческих замечаний.
Показал себя хорошо и во время активации доработанного режима Headless. С ним начинают моргать с большей амплитудой светодиоды зеленого цвета. Для пользователей различных уровней можно произвести активацию режимов активности квадрокоптера: Fast Mode, Save Mode.
Во время разряда аккумулятора включается режим автовозврата на место взлета. Это же происходит и при потере сигнала. Посадка производится качественно без нареканий. Заявленное разработчиком время составляет 15 минут. Во время тестового испытания дрон почти в него уложился. Полетное время – 13 минут.

Если во время управления коптером на мобильный телефон поступит звонок, пользователь без труда может на него ответить. При этом устройство зависнет, и будет ожидать дальнейших команд от пилота.
К качеству съемки также нет нареканий. Прекрасно работает электронная стабилизация без всяческих вибраций. Видео по своему качеству отличное. Фотографии придутся по душе любому поклоннику селфи.
Управление

В комплектации дрона нет специальной системы управления. Оно осуществляется с помощью мобильного гаджета на iOS или Андроид. После установки ПО «Xiro Xplorer» пользователю потребуется синхронизировать смартфон или планшет с квадрокоптером. Это отнимет несколько минут времени. После синхронизации расстояние полета дрона составит 100 метров, что весьма неплохой показатель для такого девайса.
Основой для полетного коллектора является процессор Qualcomm APC2878. В режиме реального времени разрешение картинки получается с разрешением 720р.

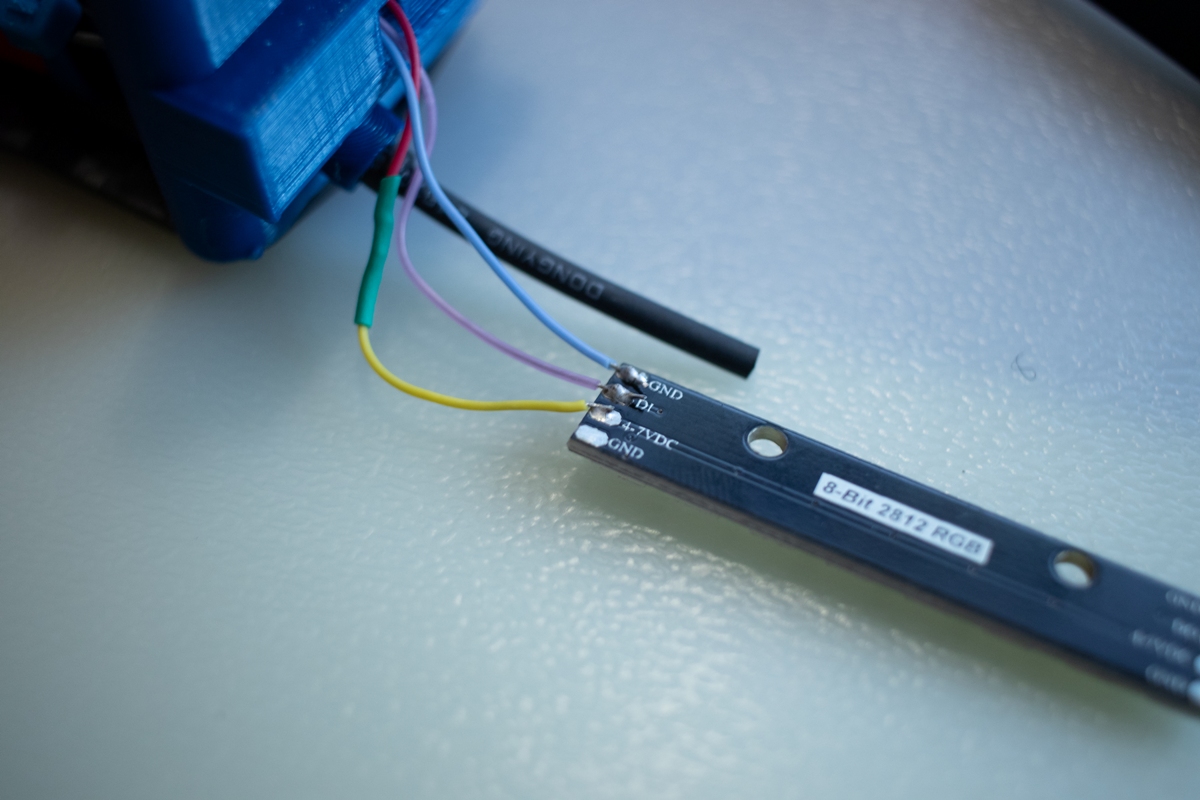
Установка led подсветки на квадрокоптер.
Во-первых, обозначу изменения с прошлой части. Мне, наконец-то, пришли LED панели, установил их сзади квадрокоптера. С подключением панелей трудностей не возникло, плюс и минус берем любые 5-вольтовые с платы, а сигнал LED я снял с коннектора вот таким вот образом.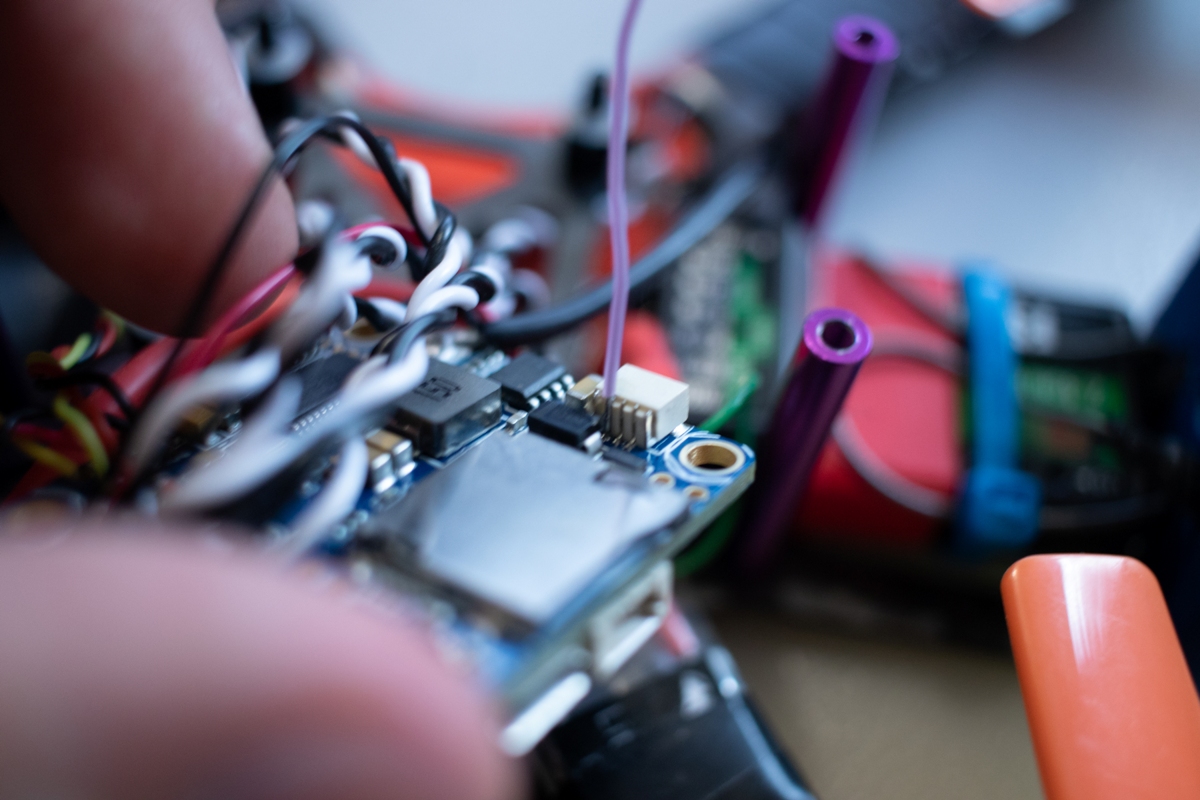

Установка и подключение gps модуля и компаса на квадрокоптер.
Для подключения GPS модуля на контроллере Omnibus F4 PRO V3 есть 6-ти пиновый разъем, показанный на картинке.
Однако модули BN-880 GPS обычно приходят с увеличенными коннекторами, не подходящими для Omnibus. Из этой ситуации есть несколько выходов:
Во-первых, спаять провода на задней стенке разъема, как я показал на примере с приемником Flysky.
Во-вторых, коннекторы можно заказать отдельно за копейки. Например, здесь.
В-третьих, посмотрите внимательно содержимое коробочек с камерами и видеопередатчиками, там могут быть подходящие вещи. Именно по третьему сценарию я решил эту проблему.
Смотрите документацию к вашему GPS модулю и просто соедините одноименные контакты модуля и контроллера между собой. НО! RX-модуля нужно соединить с TX-контроллера, а TX-модуля с RX-контроллера. Даже если вы их перепутаете, ничего не сгорит, просто модуль не запустится.

