

Проверьте пропеллеры
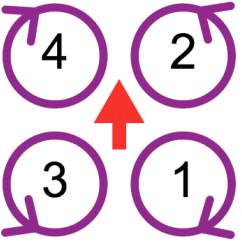
Правильно ли установлены пропеллеры? Квадрокоптер — это рама и 4 двигателя, от слова КВАДРО. Для правильного полета 2 двигателя должны крутиться по часовой стрелке и 2 против часовой.
Для удобного восприятия — просто запомните, что двигатели крутятся «внутрь» дрона.
На изображении выше хорошо видно кромку лопасти, которая будет цепляться за воздух.
Всегда снимайте пропеллеры, когда выполняете ремонт или настройку квадрокоптера, и не ставьте их, пока он не будет готов к полету.
Это очень важное правило, может что-нибудь замкнуть или вы случайно своими действиями включите газ — пропеллеры вас достаточно сильно поранят. Несколько тысяч оборотов в минуту в любом случае нанесут травму.
Лопасти пропеллеров могут не только вас порезать, но и замкнуть/перерезать электронику. Как правило, если производится какой-то ремонт на дроне, то со всех сторон начинают торчать провода и прочая электроника, чтобы был доступ к нужному месту.
Снимайте пропеллеры!
Подключите квадрокоптер к Betaflight Configurator, перейдите во вкладку Setup, там вы увидите 3D-модель дрона. Подвигайте во все стороны дрон (который у вас на столе), он должен полностью повторять ваши движения. Если вы наклонили нос вниз, то моделька тоже должна наклониться стрелкой вниз.

Если вы наклонили дрон носом вниз, а моделька наклонилась вправо, значит, вам нужно внести корректировки во вкладке Configuration, в блоке меню «Board and Sensor Alignment». Как правило, проблемы такого характера бывают с осью вращения. Там нужно будет выставить значение в градусах, например, 170 (число рандомное, все зависит от того, как будет вести себя моделька по отношению к реальному квадрокотперу).
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
Просто необходимая вещь для гоночного квадрокоптера (да и для съемочного тоже), используется в основном для поиска после падения, своим сильным писком поможет найти дрон даже в густой траве. Также пищалка может издавать сигналы при неисправностях, готовности к взлету, низком заряде аккумулятора и так далее.
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю

Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
В отличие от самолетов или вертолетов, любительские квадры не только проще в управлении, но и зачастую проще в ремонте. Более того, в некоторых ситуациях ремонт вовсе не нужен.
Конечно, охватить все существующие неполадки квадрокоптеров вряд ли возможно. Все модели разные, и, хотя их и объединяют общие принципы работы, однако электронная начинка, интеллектуальные режимы, настройки управления отличаются порой кардинально. Но можно дать некоторые общие рекомендации. Например, подсказать, как правильно должны крутиться винты, для чего необходима калибровка гироскопа, на что обратить внимание, если движки работают рывками или не работают вовсе.
Типичная проблема, с которой сталкиваются новички – коптер не взлетает, хотя винты исправно вращаются на увеличенной мощности. Скорее всего, дело в неправильно установленных пропеллерах.
Понять, как правильно установить винты на квадрокоптер, очень легко. Проверьте маркировку, нанесенную на них, а также маркировку на лучах. Они должны совпадать. Скорее всего, пропеллер, который должен вращаться по часовой, был поставлен на двигатель, вращающийся против часовой стрелки (или наоборот).
В результате, направление вращения винтов оказалось неверным. Из-за этого дрон не способен взлететь. Прежде чем что-то разбирать или относить коптер в ремонт, еще раз проверьте правильность установки винтов.

Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.
Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить. Повторение проблемы укажет на неисправность регулятора. Если же движок заработал, то проверять придется электронный контроллер. Может потребоваться сервисное обслуживание.
Появление посторонних шумов при запуске движков может являться признаком неисправности. Вполне может быть, что шумы генерируются не самими моторами, а погнутыми или деформированными винтами. Проблема легко решается осмотром и ремонтом пропеллеров, либо же их заменой.
Поставьте коптер на ровную поверхность и внимательно присмотритесь к пропеллерам. Если один или несколько винтов являются выпуклыми, скорее всего, именно они являются источником шума. Искривление поверхности пропеллера приводит к уменьшению подъемной тяги, ведь скорость винта снижается. Балансировка пропеллеров позволит убрать или значительно уменьшить уровень шума. Впрочем, пропеллеры являются расходниками, и их проще всего заменить.
Хуже, если шум издают двигатели. Это может говорить о том, что поломка скрыта внутри корпуса мотора. В таком случае ремонт квадрокоптера будет заключаться в проверке и замене движков.
Отсутствие реакции на команды зачастую объясняется тем, что в пульте дистанционного управления сели батарейки или разрядился аккумулятор.
Если сигнальный индикатор на аппаратуре не загорается, то с высокой долей вероятности все дело в севших батарейках. Соответственно, никакой ремонт проводить не нужно. Достаточно вставить свежие элементы питания.
Бывает и так, что пилот неверно выполняет последовательность действий, соединяя коптер с пультом. В инструкции обычно подробно расписываются шаги, которые необходимо совершить, чтобы инициализировать беспилотник. Иногда причиной отсутствия реакции на команды является неверное положение дрона (аппарат перевернут или лежит на боку). Некоторые модели дронов не реагируют на пульт до тех пор, пока не будут установлены на горизонтальную плоскость.
Если замена батареек и правильно проведенная процедура инициализации ничего не дали, то проблему следует искать в проводах и контактах, иными словами, внутри пульта. Возможно, все дело в окислившихся батарейках. В таком случае нужно их заменить и протереть контакты.
Деформация лучей
Деформацию лучей заметить довольно просто. Обычно лучи повреждаются в результате жестких падений или после столкновений с препятствиями в полете. То есть это в любом случае нештатные ситуации.
Проверьте схему двигателей (mixer)
Перед этой проверкой снимите пропеллеры!
Если у вас переворачивается квадрокоптер, откройте Betaflight и подключите аккумулятор к дрону, затем перейдите во вкладку Motors и проверьте направление каждого двигателя в соответствии со схемой. На глаз вы навряд ли сможете определить направление, так как мотор будет слишком быстро крутиться даже на малых оборотах, поэтому используйте палец. Слегка дотроньтесь до мотора и вы поймете, в какую сторону он крутится.
Если по схеме выяснилось, что мотор крутится не в ту сторону, есть два способа это исправить:
- перепаять провода
- зайти в BL_heli и сделать реверс.
Снова зайдите в Betaflight во вкладку Setup, там будет 3D-модель вашего дрона. Возьмите его в руки и подвигайте, модель должна четко повторять ваши действия. Если вы наклоняете вперед, а моделька наклоняется вправо, то вам нужно скорректировать направление. Для этого перейдите во вкладку Configuration и найдите поле Board and Sensor Alignment. В поле вводятся градусы. Для определения того, сколько градусов прописать, воспользуйтесь транспортиром, ну или на глаз — к примеру, начните с 90°.
Также нужно откалибровать акселерометр. Перейдите во вкладку Setup, там будет кнопка Calibrate. Установите дрон на ровную поверхность и нажмите кнопку. Возможно, датчик был не откалиброван и обманывал полетный контроллер, и последний пытался это исправить.
Во вкладке Setup будет блок для выбора схемы двигателей. Если у вас 4 двигателя, то должна быть выбрана схема Quad X.

Перед тем, как прикрепить моторы к раме, измерьте длину винтов. Слишком длинные могут повредить обмотку мотора, что приведет к короткому замыканию, да и просто испортит двигатель.
Сгоревшим мотором дело может не обойтись. Если вы еще не в курсе — карбон (материал, из которого сделана рама) токопроводящий материал, и если винт замкнет на проводку, то сгорит и вся остальная электроника, которая касается рамы.
Вот инструкция, как этого добиться при использовании Baseflight / Cleanflight или Betaflight
- Снимаем винты
- Меняем направление вращения в регуляторах через BLHeliSuite
- Переходим в консоль Betaflight CLI и пишем:
Ставим винты в обратном порядке, CW вместо CCW и наоборот. Не нужно переворачивать винты! 🙂
После обновления прошивок каждый раз убеждаемся, что у нас всё настроено как надо.
№6 ПРОВЕРЬТЕ ПРИЕМНИК
Подключитесь к бетафлайт и перейдите во вкладку «receiver». Подключите аккумулятор, включите пульт. Проверьте, все ли команды реагируют. Когда вы двигаете стиками и переключателями, цветные полоски тоже должны двигаться.
Если ничего не происходит, убедитесь, включен ли приемник и пульт, правильно ли подключен приемник. Также убедитесь, что во вкладке Конфигурация выбран правильный тип приемника (IBus, SBus и т.д.), а также правильный ли выбран протокол работы (мультишот, дшот и т.д.).
Если полоски двигаются, но не в том порядке, попробуйте поменять карту разметки с AETR1234 на TEAR1234 во вкладке «receiver».
или внеся корректировки через CLI, подробнее здесь (в статье это заголовок Receiver).
Неправильные средние значения приведут к тому, что ваш дрон начнет дрейфовать и лететь в разные стороны (смотря какой канал не в середине).
Проверьте, какое число показывает стик газа, когда он в нижнем положении. Число не должно быть выше 1040, в противном случае дрон не получится заармить (запустить двигатели).
Механические проблемы
Попробуйте заармить дрон (запустить двигатели) и дать небольшой газ. Без пропеллеров, конечно же.
Теперь слушайте, как они работают — есть ли посторонний шум, скрежет, вибрации или подергивания. Скорее всего, мотор будет дергаться или вибрировать. Для исправления можно попробовать следующее:
- проблему может исправить монтаж полетного контроллера на мягкие подушки (силиконовые);
- если вы используете режим обновления 32К/32К, попробуйте вернуться на 8К/8К, так как на 32К гироскоп намного чувствительнее;
- попробуйте уменьшить значение фильтра гироскопа «low pass filter frequency» (это фильтр низких частот);
Если проблему не удалось устранить, почитайте эту статью, возможно, она вам поможет.

Если ваш квадрокоптер до этой проблемы летал нормально, то, скорее всего, дело в механическом повреждении одного из компонентов. Это также может привести к вопросу, почему переворачивается квадрокоптер.
На двигателе могут отвалиться магниты, вал, может рассыпаться подшипник или оплавиться эмаль на обмотке. Все это выводит из строя двигатель. Из-за магнита и подшипника заклинет, из-за вала может вылететь колокол или зацепится магнит — тоже заклинет. А оплавленная эмаль вызовет короткое замыкание — мотор сгорит.
От перегрева, а также от механических ударов могут выйти из строя регуляторы оборотов, так как это довольно сложная электроника, основанная на «ключах», и выход из строя одного из компонентов регулятора нарушит работу всей платы, а та в свою очередь — работу двигателя.
Если после калибровки акселерометра нет никакого эффекта и модель квадрокоптера по-прежнему не понимает, в каком она положении — у вас проблемы с датчиком, его нужно либо поменять (если вам повезло и вы специалист по ремонту электроники), либо заменить полетный контроллер. Но перед этим попробуйте сначала его отключить во вкладке Configuration. Вы, конечно, не сможете летать в режиме стабилизации, но опытные пилоты в нем и не летают, только в АКРО.
Если во вкладке Setup моделька постоянно крутится и ведет себя неадекватно, то есть проблемы с гироскопом. Для проверки попробуйте отсоединить питание и снова включить — после каждого включения гироскоп проходит калибровку. Если это не помогло, то выход только в замене полетного контроллера.
Возможно, вам поможет статья: Не запускается квадрокоптер? Исправляем проблемы
Статья написана на основе.
№8 НАСТРОЙТЕ Failsafe

Failsafe — это одна из главных вещей, которую должен знать каждый новичок в первую очередь. Если вы не настроите Failsafe, то при потере сигнала ваш дрон просто улетит и будет лететь, пока не разрядится аккумулятор. О последствиях, думаю, можно и не говорить, это, как минимум, потеря денег, максимум — он упадет кому-нибудь на голову.
Как настроить Failsafe, можно прочитать здесь.
№9 ОТКАЛИБРУЙТЕ регуляторы оборотов (ESC)
Регуляторы не нужно калибровать, если используется протокол DShot, включая DShot150, DShot300, DShot600, DShot1200 и DShot2400. Но нужно будет калибровать, если у вас PWM, Oneshot125, Oneshot42 и Multishot.
Как откалибровать регуляторы оборотов, читайте здесь.
№11 ПРОВЕРКА FPV системы
Перед первым полетом убедитесь, что FPV система корректно работает: камера fpv снимает и направляет видео в видеопередатчик, а он в свою очередь отправляет сигнал в ваш шлем или очки. Проверьте, совпадают ли каналы на видеопередатчике и шлеме/очках, качественная ли картинка.
Если у вас есть OSD, то его можно настроить под свои нужды, статья как настроить OSD Betaflight.





 купить по привлекательной цене 46990 руб. в Москве")