

- Что делает failsafe
- Введение
- Что такое failsafe
- Основные поломки и варианты их исправления
- Airmode
- Angle, horizon, acro modes
- D term фильтрация
- Low pass
- Mems гироскоп
- Notch фильтр
- Pid controller
- Rpm filter
- Виды поломок у квадрокоптеров линейки dji
- Вкладка configuration
- Вкладка modes
- Вкладка receiver
- Вкладка setup
- Восстановление квадрокоптера
- Вот здесь очень важно!
- Все о ремонте квадрокоптеров
- Как разобрать квадрокоптер
- Настраиваем режимы в betaflight
- Настраиваем тумблеры в пульте
- Настройка failsafe в betaflight
- Настройка failsafe в taranis
- Настройка failsafe на приемнике
- Обращение в сервисный центр по ремонту квадрокоптеров.
- Осмотреть корпус дрона
- Поиск неисправности дрона
- Проверка и калибровка
- Проверьте пропеллеры
- Разборка и ремонт мотора квадрокоптера spl x5
- Разборка квадрокоптера spl x5
- Режимы в betaflight
- Рекомендации
- Ремонт (замена) моторчика дрона
- Ремонт двигателя syma x5c
- Ремонт мотора квадрокоптера spl x5 (syma x5)
- Следы износа двигателя квадрокоптера spl x5
- Средние цены на ремонт квадрокоптеров dji phantom
- Фильтрация
- Чистка мотора квадрокоптера
Что делает failsafe
При настройке этого режима, можно выбрать действие из 2 пунктов — что будет делать квадрокоптер, если сработает фэйлсэйф.
Режима два:
drop — квадрокоптер отключает полностью двигатели и он падает. land — квадрокоптер уменьшает газ до 20% и медленно садится.
Пилотам обычно рекомендуется выбирать режим Drop, потому что дрон, который медленно снижается с работающими двигателями — очень опасен. Лучше заменить сломанные пропеллеры или другую часть дрона, чем навредить кому-то.
В случае, если вы потеряли видеосигнал и не видите ничего в шлеме, можно отключить пульт и квадрокоптер отключит двигатели. Так хотя бы больше шансов его найти (примерно же знаете куда он летел), чем если он продолжит лететь дальше по своим квадрокоптерским делам.
Многие передатчики, приемники и полетные контроллеры поддерживают failsafe и настройка одного из них не испортит настройки другого компонента с failsafe.
Для тех, у кого в качестве аппаратуры управления используется Frsky Taranis, то достаточно настроить failsafe на самом пульте. В betaflight ничего делать не нужно. Если же у вас не Таранис, а FlySky и т.д., то нужно будет настраивать функцию в betaflight.
Введение
Syma производит достаточно качественные аппараты для дистанционного управления. Но даже качественная вещь порой нуждается в ремонте, особенно при халатном отношении к безопасности эксплуатации. Специализированная контора по ликвидации неисправностей справится с починкой в очень короткий срок. Часто поломанное устройство вновь выглядит, как новая и работает как часы.
Помощь ремонтника может понадобиться в случае деформации шасси, пропеллеров. Иногда аппарат просто отказывается взлетать, а пилот не может распознать очевидных причин. Бывают проблемы с аккумуляторами и зарядными устройствами. Также поводом для ремонта может послужить нехарактерный шум во время полета.
Нередко владельцы жалуются на странное поведение траектории, ошибки камеры и тому подобное. Преимуществом обращения в сервисный центр является не только квалификация и знания работников, но и необходимая техническая аппаратура. Кроме того, многие фирмы дают гарантии на некоторое время.
Что такое failsafe
Failsafe — это функция, которая выполняет определенные действия после того, как пропадает радиосвязь между квадрокоптером и аппаратурой управления.
Failsafe срабатывает в следующих случаях:
- квадрокоптер отлетел дальше зоны действия сигнала аппаратуры управления,
- между квадрокоптером и пультом препятствие, через которое не проходит сигнал,
- пропало питание в пульте или приемнике (аппаратура отключена/отключилась)
- приемник отключился от полетного контроллера
Основные поломки и варианты их исправления
Являясь одним из новейших технологических устройств, дрон Syma довольно надежен и работает стабильно. Особенно это касается дорогих моделей. Бюджетные варианты коптеров этой марки в основном предназначены для новичков пилотирования, поэтому они достаточно крепки и терпят небольшие крушения без ущерба функциональности устройства.
Но любая вещь в конце концов может поломаться из-за неловкости пилота, форс-мажорного случая или просто из-за долгого времени эксплуатирования. Все зависит от того, насколько внимательно относился владелец к аппарату, каковы были на него нагрузки и как часто применялись профилактические меры.
Есть некоторые недочеты, появляющиеся в работе беспилотника, которые можно быстро решить на месте, в домашних условиях. Зная их признаки и способы решения, починить коптер может любой владелец. Приведем некоторые примеры поломок Syma, которые можно исправить своими руками.
Квадрокоптер и пульт включаются, но не могут обнаружить друг друга. Проверьте, направлен ли стик газа на минимальное положение. Опустите ее в нижнее положение и ждите инициализации. Если перезапуск передатчика и дрона не помогли, попробуйте установить модель на идеально плоскую поверхность.
Если лампочка включения на пульте ДУ не включается, то, скорее всего, батарейки просто сели и нужно вставить новые.
Когда при взлете машину начинает вести в разные стороны и коптер не может находиться в одной точке несколько секунд, то существует проблема в системе стабилизации. Все, что может сделать любитель в этой ситуации, это попробовать повторно произвести взлет, но только с ровной поверхности. Причиной может быть и низкий уровень энергии аккумулятора.
Бывают ситуации, когда дрон не может взлететь, хотя и включается в штатном режиме. Причиной может быть даже не поломка, а неправильная установка винтов. Каждый пропеллер помечен в соответствии со своим правильным положением на корпусе квадрокоптера. Сверьтесь со схемой в инструкции.
Большинство неисправностей появляются после неудачного приземления коптера или столкновения с посторонним предметом. Если после неожиданной посадки в двигателе появился посторонний шум, нужно попробовать на вал поломанного движка и потянуть на себя. Если звук не прекратился, то отнесите Syma в ремонт — нужно будет полностью заменить мотор.
https://www.youtube.com/watch?v=tdbkggoU-xw
Также после аварии велика вероятность деформации лучей. В этом случае нужно попробовать выправить их руками и нажать на защелки.
Ошибка под названием pic watchdog emergency означает поломку навигационной платы. Возможно, отломился разъем, соединяющий электронику с навигацией. Лучше всего обратиться к профессионалам.
Если не горят зеленые и красные светодиоды на корпусе, то никакой поломки нет. Эти индикаторы нужны для полетов в темное время суток, чтобы визуально различить аппарат в небе. При хорошем освещении их можно включить для красоты, но тогда сократиться время работы.
Если лампочки не горят даже после преднамеренного включения, разберите корпус. Вы увидите красные и черные провода — это силовые кабели, и 12 проводков для обмена данными. Все они должны присоединяться к своим разъемам, если хотя бы один отсоединился — Syma будет работать неправильно.
Часто на дисплее высвечиваются надписи, имеющие своей целью подсказать неисправность владельцу. Однако не все могут их правильно понять и распознать неполадку. Если на экране появились слова Ultrasound emergency, значит, есть проблемы с модулем навигации или сонаром. Скорую помощь в таком случае будет просто продуть их. Если изменений не произошло, проверьте соединения, как было описано выше.
Start not received трудно отнести к какой-либо конкретной неисправности, нужно исходить из общих симптомов. Если при этом Syma не взлетает, то причина вновь в проблемах с навигацией.
Из-за чего же могут возникнуть ошибки навигации? Чаще всего причиной является механическое воздействие, засорение пылью, воздействие влаги. Может перестать работать микроконтроллер, опять же из-за влажности или срока службы. Также причины могут быть в шлейфе и бракованных деталях.
Airmode
Airmode — это не полетный режим, это функция, которая улучшает управляемость коптера при нулевом газе. Но её использование может привести к неожиданным ускорениям моторов, когда коптер стоит на земле, так что будьте осторожны.
Этот режим действительно доступен ещё и как фича/функция, так что если её включить на вкладке Configuration, то она исчезнет со вкладки Modes. Преимущество использования вкладки Modes в том, что вы сможете включить/выключить Airmode прямо в полете.
Angle, horizon, acro modes
При отпускании стиков в режимах Angle и Horizon коптер будет автоматически выравниваться, используя как гироскопы, так и акселерометры. Новичкам в этих режимах летать проще. В режиме Horizon можно делать флипы и ролы, а в режиме Angle — нельзя, тут углы ограничены в 45 градусов (настраивается).
В любом случае, Acro — это самый главный полетный режим для фристайла и гонок. Новичкам я настоятельно рекомендую начать его использовать как можно раньше.
Что такое режим Acro?
Возможно вы уже заметили, что режима Acro нет на закладке Modes. Это потому, что Acro режим автоматически включается, когда вы армите коптер. Однако, он может быть переопределен другим режимом, например, Horizon или Angle, когда они активируются.
Исчезли режимы Angle и Horizon
Если режимы Angle и Horizon недоступны на вкладке Modes, это значит, что в Betaflight отключен акселерометр. Некоторые отключают аксели, т.к. летают только в акро- режиме, а отключение акселерометров освобождает процессор от некоторых ненужных задач.
D term фильтрация
Как было сказано выше, D способен приумножать шумы от гироскопа, поэтому в Betaflight есть фильтрация D. Ниже на грификах видно уровень шума до фильтрации и после.
В сообществе нет четкого понимания, стоит ли сильно фильтровать D или нет. Но есть правило горячих моторов, чем меньше фильтрация и чем выше D, тем сильней они греются и могут даже сгореть. Но и в обратную сторону мы получаем задержку.
Low pass
Фильтры
Как показывает предыдущий график — сигнал от гироскопа содержит информацию от 0 Гц до 1000 Гц, но нас интересует только диапазон 0-80 Гц, поскольку это фактическое движение квадрокоптера, о котором должен знать PID-контроллер. Таким образом, нам нужно решение для фильтрации, чтобы позволить низким частотам проходить через PID-контроллер, в то же время ослабляя высокие частоты, и для этого мы можем использовать фильтр Low Pass (Низких частот).
Фильтры нижних частот пропускают низкочастотный сигнал и ослабляют высокие частоты, которые в основном являются просто шумом.
Устанавливается частота среза, и контроллер просто уменьшает сигналы выше этой частоты. Кривая затухания позволяет не срезать все под чистую, а чем выше частота шума, тем сильней происходит его затухание, плавно.
Часто пилоты допускают ошибку устанавливая такой фильтр на той же частоте, что и видимый шум. Например на 200Hz. Поскольку фильтр плавно ослабляет шум, установка такого фильтра не даст особого результата. Фильтр стоит устанавливать на более низкие частоты. Возможно, даже на 80Hz.
Чем ниже вы устанавливаете такой фильтр, тем больше фильтрации происходит
Устанавливая фильтрацию, следует помнить об одной простой вещи. Чем больше фильтрации тем больше задержка. Понятное дело, что она в миллисекундах и не значительная, но для PID-контроллера это критично. Так как он начнет реагировать на события позже, а это значит, что он будет пытаться выровнять квадракоптер в прошлом 🙂
Mems гироскоп
У каждого квадрокоптера есть FC — Flight Controller, который по сути является мозгами. На этих контроллерах так же присутствует цифровой чип, который часто называют gyro — гироскоп. Это сенсор, который чувствует движение. Он содержит в себе маленькое электро-механическое устройство, которое так и называется — MEMS (Micro Electro Mechanical System).
Внутри этого устройства расположены механически резонирующие «вилки». Эти вилки, расположены по всем трем осям (pitch, roll, yaw) и двигаясь (механическая часть) создают флуктуации вольтажа (электрическая часть).
Флуктуации (колебания) вольтажа, по факту являются аналоговыми волнами, которые преобразуются в цифровую информацию для обработки полетным контроллером. Когда мы говорим 8k gyro, это значит, что 8000 раз в секунду, аналоговый сигнал превращается в цифровой и обрабатывается контроллером, прошивкой, в данном случае Betaflight.
Notch фильтр
Notch переводится как зарубка, собственно это примерно так и выглядит:
Фильтра откидывают часть шума ниже и часть шума выше. Начиная с Betaflight 3.1 эти фильтры являются динамическими, и подстраиваются под различный шум.
Фильтра используются в связке с Low Pass фильтрами, но используются уже для фильтрации шумов от моторов, которые находятся выше.
Pid controller
PID Controller — это такая система которая корректирует позицию квадрокоптера согласно стикам (вашему управлению) или заданного положения (ну, что бы его не колбасило). PID настраивается за счет 3х параметров — P, I и D. К сожалению в этой статье мы не будем детально рассматривать настройку PID. Если вы пилот, то уже знаете, а если новичок, но на эту тему будет отдельная статья.
Эта система хорошо работает, когда количество шумов минимальна, иначе мы можем столкнуться с такими проблемами как осцилляция (вибрации) или перегрев моторов.
D term в PID контроллере имеет особенно отношение к шуму. D сглаживает быстрые движения, но вычисление D в PID контроллере значительно усиливает шум в сигнале. Это означает, что шум от гироскопа существенно усиливается значением D term и поэтому мы фильтруем в двух местах — гироскоп и D.
В качестве примера такого приумножения покажу вам такие вот логи:Первый график — гироскопВторой график — PIDТретий — моторы
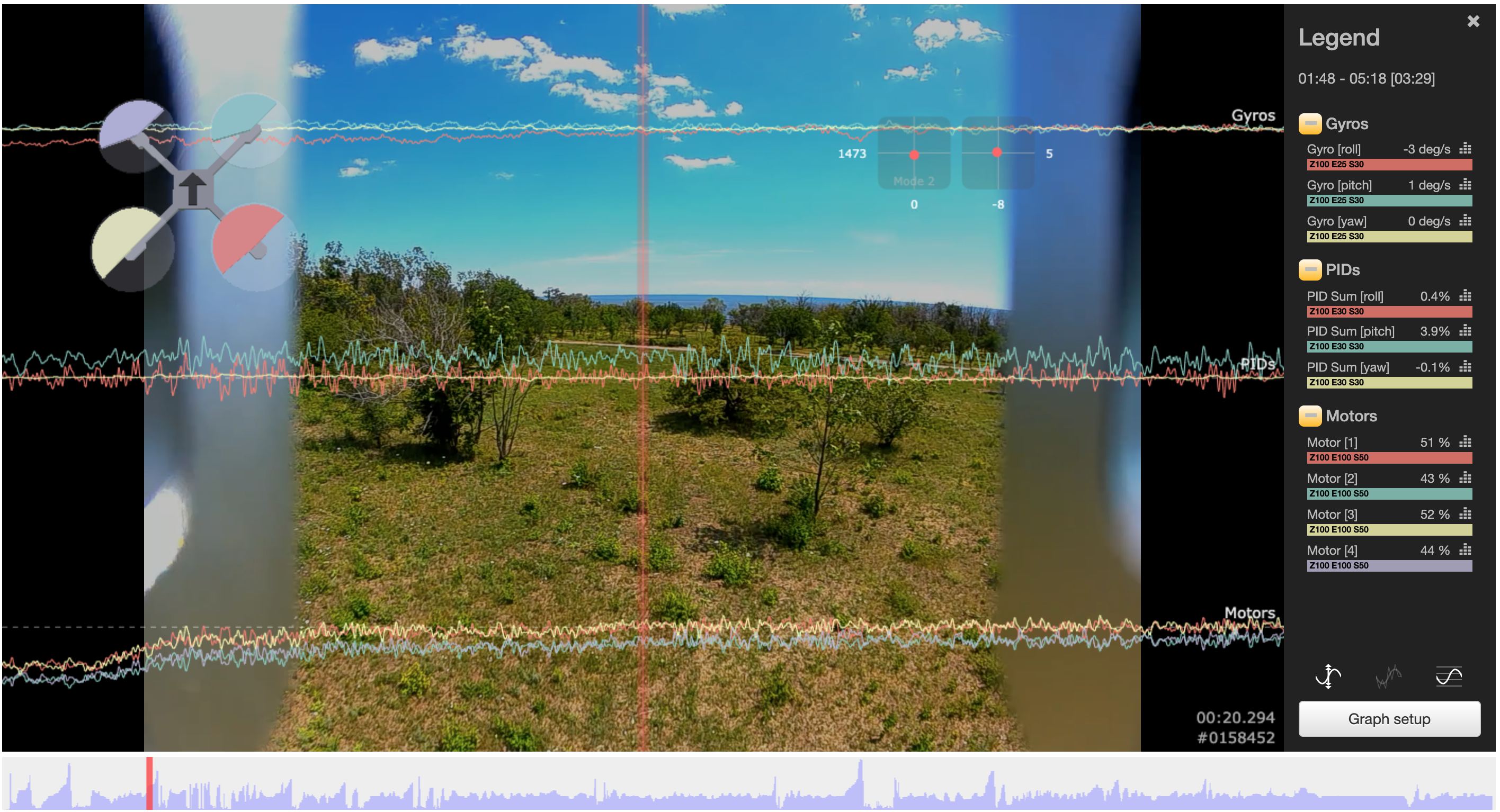
(это нормальные пропеллеры, с немного уменьшенной фильтрацией)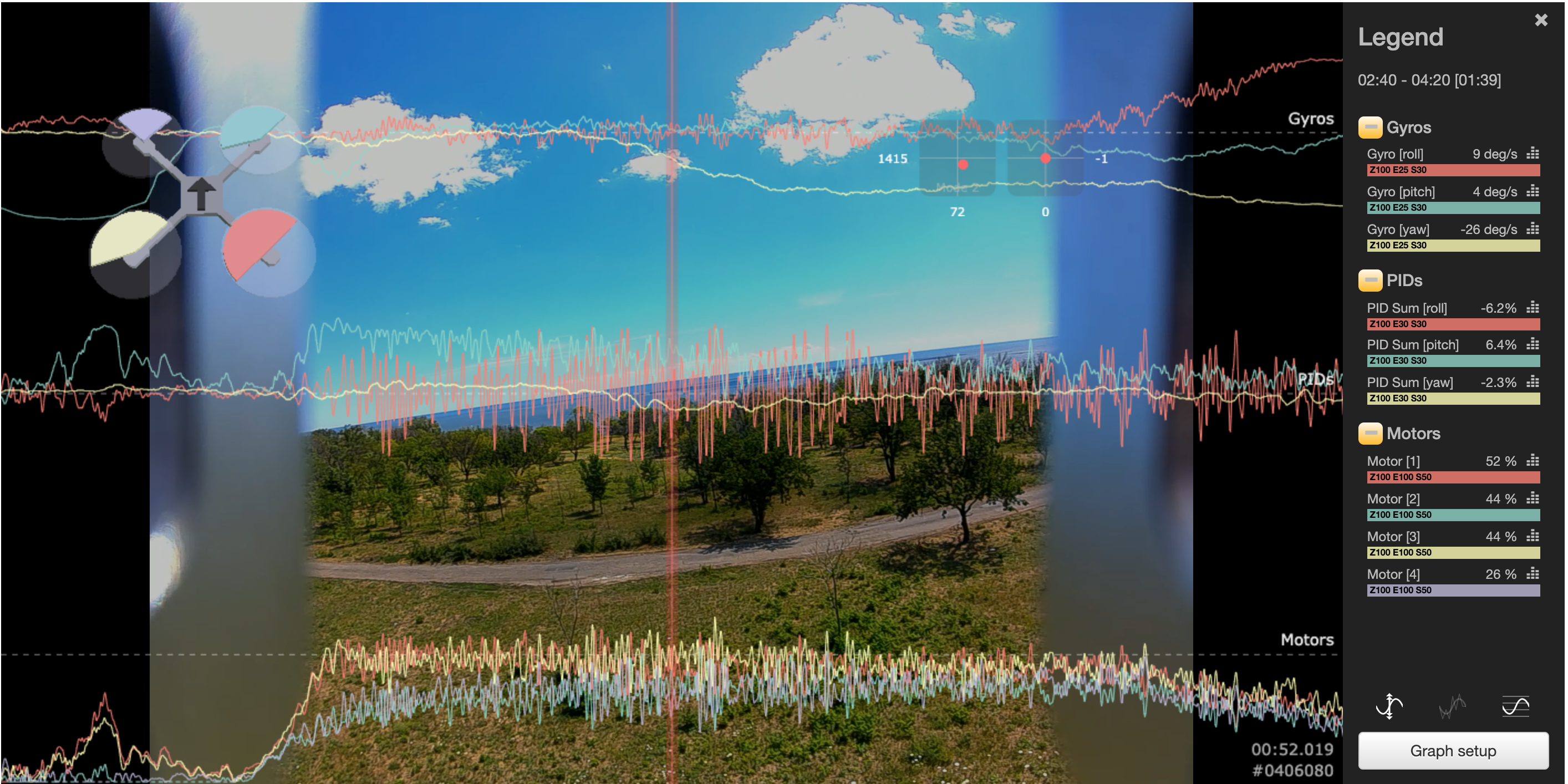
(Как видите вибрации от плохих пропеллеров усиливаются на этапе PID контроллера, что ведет к излишнему напрягу моторов, их буквально колбасит)
Скрины из — Blackbox Explorer.
Rpm filter
Так вот, собственно, что новое я стал использовать, так это RPM фильтрацию. Она работает за счет двухстороннего протокола DSHOT который позволяет полетному контроллеру узнать точное количество оборотов конкретного мотора. И уже на основании этих данных применяется фильтрация.
(Ваш ESC должен поддерживать двухсторонний DHSOT)
Прошивка на ESC, от 3.7
Если моторы греются, то это проблема. Горячие моторы могут быть признаком того, что на моторы попадает много шума и они пытаются реагировать на вибрации так часто, что начинает выделяться тепло.
Греться моторы могут по ряду причин, старая рама, погнутые колокола у моторов, нарушенная балансировка, лишние прибомбасы на вашем коптере.
Конечно лучше иметь, как говорят clean build, и что бы все было новое, но можно сперва попробовать настроить фильтрацию.
Для начала можно начать с увеличения фильтрации D, делать шаги в 20 Hz. Проверяйте температуру после каждого такого шага и найдите свой оптимальный диапазон.
А искать его следует между температурой моторов и вибрациями. Как было сказано выше, хоть и фильтрация призвана уменьшить количество шума, она может накладывать некоторые задержки и PID контроллер может не успевать. И как бы это смешно не было, вызывать вибрации. Но эти вибрации не относятся к пропвош. Это уже просто неэффективная работа PID.
В последних версиях Betaflight есть ползунки, пробуйте не менять значения самих фильтров, а попробуйте использовать эти «мастер» ползунки.
На текущий момент у меня такие настройки с включенным RPM фильтром, возможно я попытаюсь уменьшить фильтрацию еще больше:
Виды поломок у квадрокоптеров линейки dji
Как мы все знаем, компания DJI делает качественные дроны в хорошем исполнении. Казалось бы от такого качества ремонта можно избежать на 100%. Но нет. Это вещь, и как любой другой вещи нужен уход. Собственно, квадрокоптеру тоже нужен уход. Основные поломки, которые у них могут встречаться – это:
- программные сбои и выход из строя;
- краши и падения дрона;
- следствия долгой эксплуатации;
- следствия износа;
- стики, на пульте управления не расположены по центру, а отклоняются;
- при получении SSID выдается ошибка;
- поломка камеры и других компонентов после падения;
- GPS навигация не срабатывает;
- падение дрона в воду;
- батарея не держит заряд и быстро садится;
- материнская плата повреждена, или ее отдельные компоненты;
- треснул или повредился пропеллер;
Если у вас есть поломка из списка выше, мой вам совет – делайте ремонт в сервисном центре или у частных мастеров. Не стоит этим заниматься самостоятельно, если вы в этом не разбираетесь.
В вашем городе наверняка есть такие люди, которые за небольшую плату произведут ремонт квадрокоптера DJI и у них наверняка есть необходимые детали и запчасти.
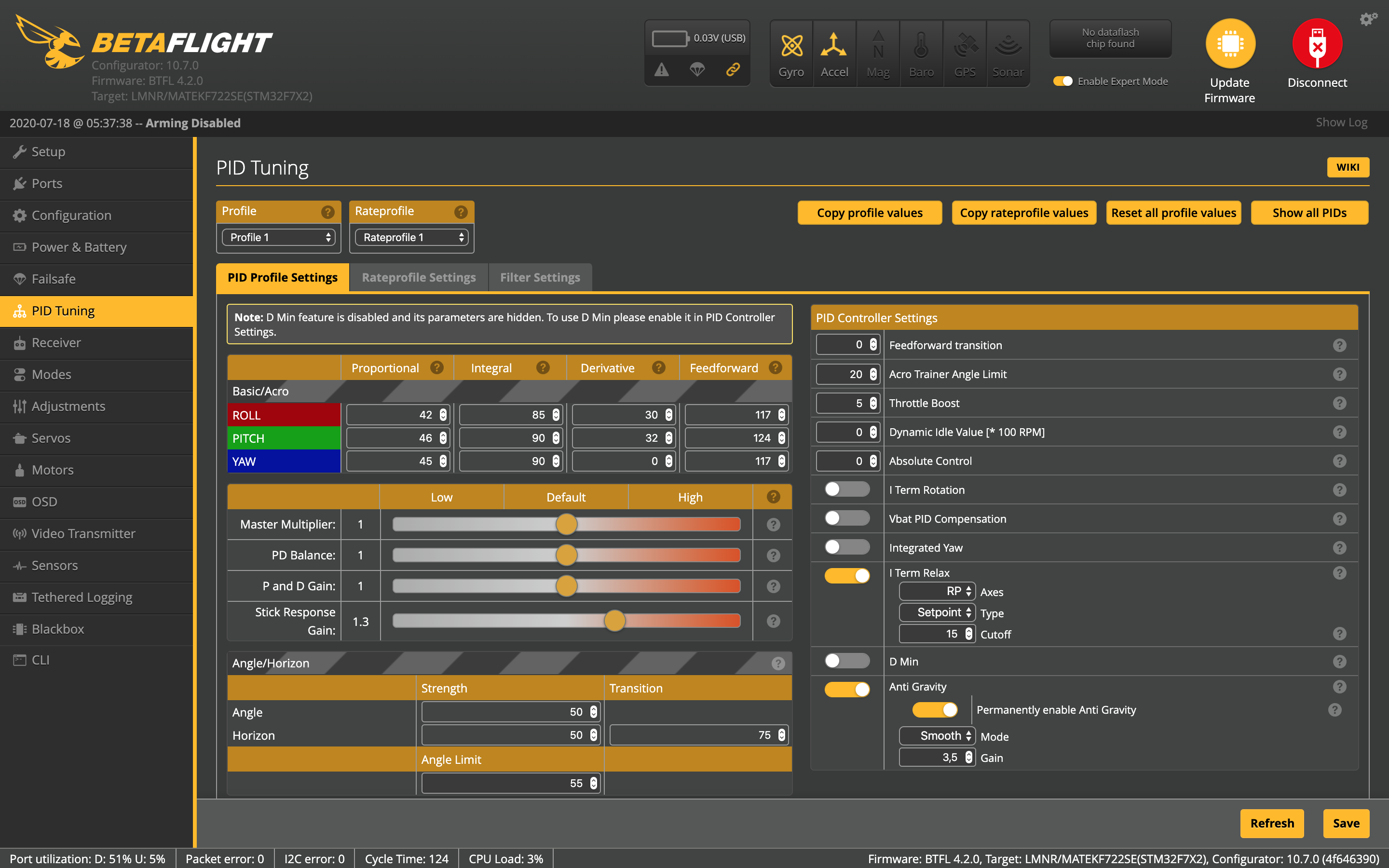
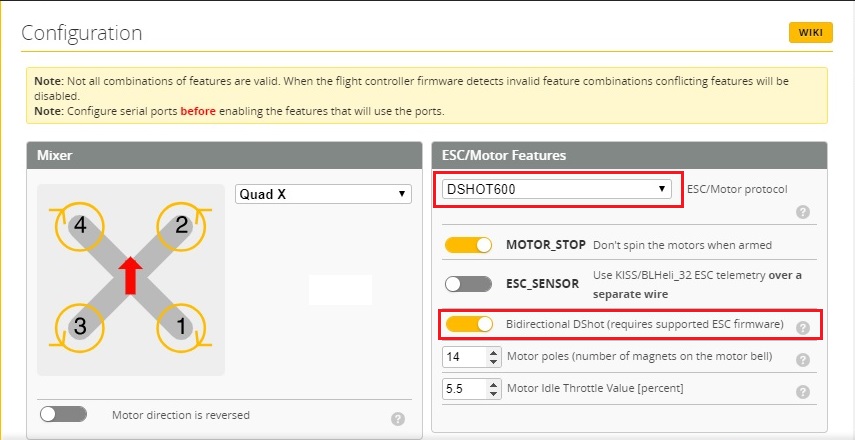
Вкладка configuration
- Раздел ESC/Motor Features
Протокол регуляторов скорости (регуляторов оборотов) — посмотрите на характеристики вашего оборудования, какие протоколы оно поддерживает. Рекомендуется использовать DShot. Обычно регуляторы с прошивкой BLHeli_S поддерживают DShot300 или DShot600, а с прошивкой BLHeli_32 — даже DShot1200.
Рекомендую отключить параметр «MOTOR_STOP«, иначе вы не сможете определить армлен коптер или нет.
Остальные параметры можно не трогать и оставить значения по умолчанию.
2. Раздел System Configuration
Looptime — время цикла, с этой частотой полетный контроллер рассчитывает полетные параметры, значение зависит от возможностей процессора, на шумных коптерах я предпочитаю использовать довольно низкую частоту 2 кГц, а на качественных коптерах — частоту повыше — 8 кГц. В любом случае, для начала подойдет и 2 кГц.
Gyro Sampling Rate — частота опроса гироскопов, обычно совпадает с looptime, хотя некоторые предпочитают поставить удвоенную частоту looptime. Можете поставить 4 кГц и looptime 2 кГц.
Потом поэкспериментируете и выберете наиболее подходящие значения, жестких правил по их выбору нет.
При смене значений этих параметров обратите внимание на CPU load (загрузка процессора) внизу экрана, старайтесь держать это значение меньше 30%. Если значение будет выше, то полетный контроллер может работать нестабильно.
Accelerometer — можно отключить, это высвободит немного процессорных ресурсов, но тогда вы не сможете использовать режимы Angle и Horizon, а 3Д модель на вкладке Setup перестанет двигаться. Еще одна причина по которой отключают эту функцию — чтобы избежать проблем при арминге коптера, если он сильно наклонен.
Отключите Barometer и Magnetometer, они нам не нужны, т.к. мы летаем на миникоптере.
3. Раздел Personalization
Craft name — название коптера, это значение будет отображаться на экране при помощи Betaflight OSD.
4. Раздел Receiver
Если у вас приемник SBUS, IBUS или Spektrum Satellite, тогда выбирайте «Serial-based receiver» в выпадающем списке «Receiver Mode». В параметре Serial Receiver Provider нужно выбрать SBUS, т.к. у нас приемник FrSky.
Если приемник использует PPM, тогда выберите PPM RX Input в списке Receiver Mode.
5. Раздел Other Features
Обычно я включаю нижеуказанные функции Betaflight. Если вы не уверены в том, нужны ли они, просто оставьте значения по умолчанию, они не помешают первому полету.
- Anti-Gravity
- Dynamic Filter
- Telemetry (чтобы работала SmartPort телеметрия)
- OSD (если ваш ПК поддерживает Betaflight OSD)
Вкладка modes
Тут мы настраиваем полетные режимы и их активацию при помощи дополнительных (AUX) каналов управления (тумблеры на аппаратуре управления):
- Arming (арминг, включение коптера/моторов)
- Airmode (управляемость коптера при 0 значении газа)
- Angle mode (режим полета без автовыравнивания)
- Beeper (пищалка)
Я предпочитаю активировать Airmode тем же тумблером что и арминг коптера, а не отдельным, но это дело вкуса.
Вкладка receiver
Тут мы проверяем, что приемник работает правильно.
Включаем аппаратуру управления и приемник, двигаем стики по одному и наблюдаем как меняются значения в соответствующих каналах. Если меняются не те каналы, тогда нужно поменять их порядок в параметре «Channel Map«.
Если ни один из каналов не работает, тогда начинаем искать проблему:
- приемник привязан к передатчику (забинден)? На приемнике должен гореть зеленый светодиод
- приемник правильно подключен/припаян к полетному контроллеру?
- уверены, что Serial RX включили на нужном порту?
- уверены, что правильно выбрали протокол?
После того как убедитесь, что все каналы работают правильно, проверьте значения в средних и крайних точках в первых четырех каналах (Pitch, Roll, Yaw, Throttle, т.е. тангаж, крен, рысканье и газ). В центральном положении эти каналы должны иметь значение 1500, а крайние значения 1000 и 2000.
Если у вас другие значения, тогда читайте вот это руководство по настройке центральных и конечных точек.
Вкладка setup
Вы должны увидеть вкладку Setup сразу, как только подключитесь к полетному контроллеру.
- Прежде чем менять настройки, сделайте резервную копию.
- Поставьте коптер на ровную горизонтальную поверхность, и откалибруйте акселерометры (см. картинку).
- Покрутите коптер в руках, 3Д модель должна вращаться так же, как и коптер
Если 3Д модель не двигается или двигается не так как коптер, тогда скорее всего полетный контроллер установлен не той стороной (обычно на плате есть стрелка, которая должна указывать вперед). В этом случае можно повернуть плату на коптере или задать YAW offset на вкладке Configuration (обычно это углы 90, 180 или 270 градусов).
Восстановление квадрокоптера
Если вы следуете правильному протоколу полета квадрокоптера, то вы примерно знаете, где он упал, основываясь на вашем последнем визуальном наблюдении. На более продвинутом дроне с GPS-навигацией вы можете использовать его приложение, чтобы увидеть, где он разбился.
Когда вы найдете дрон, осмотрите его на предмет повреждений. Задокументируйте любое обнаруженное повреждение, сделав несколько снимков на вашем смартфоне. Это особенно важно, если у вас еще есть действующая гарантия на квадрокоптер.
Прежде чем пытаться поднять коптер, убедитесь, что он выключен. Кроме того, убедитесь, что ваш пульт управления также выключен. Если ваш квадрокоптер не отключен должным образом, пропеллеры могут включиться, чтобы стабилизировать гаджет, когда вы соберетесь его поднять или переместить.
Вот здесь очень важно!
Не нужно снимать все магниты, так как они расположены поочередно — плюс/минус/плюс/минус и чтобы понять, где у магнита плюс, а где минус, вы потратите много времени:
Поэтому делаем так:
Берете пинцет и пробуете оторвать какой-нибудь магнит, если отрывается, аккуратно его снимаем и ложим той стороной, которой он был приклеен — на стол:
Далее берем ватную палочку, смачиваем в ацетоне и чистимпаз в котором был магнит от грязи. Вытираем сухой и чистой стороной. Грязи будет будет много, это видно по фотке выше. Также берем магнит, не забывая какой стороной он лежит на столе и протираем ацетоном посадочную сторону.
Берем зубочистку, капаем на нее клей и аккуратно, тонким слоем смазываем площадку в куполе, т.е. паз, с которого сняли магнит. Только не лейте туда литр клея, мотор будет очень быстро крутиться, а этот клей создаст лишний вес в этой точке, мотор начнет вибрировать и быстрее изнашиваться.
Берем магнит и быстро ставим его на место, сильно прижимая.
Вот так делаем с каждым отвалившимся магнитом.
После проклейки мотора, смазываем маслом (не подсолнечным, а машинным, а лучше оружейным) ротор и подшипники. После этого ставим стопорное кольцо на место. Это то еще занятие по установке кольца в такой паз, мало того, что нормально не залезешь туда, так оно еще и крутится на роторе 
Все, попробуйте покрутить его, если все верно сделали, нигде ничего задевать не будет и его можно ставить на дрон.
Вот так вот вы смогли сделать ремонт бесколлекторного двигателя своими руками, ничего сложно нет в том, чтобы приклеить отлетевшие магниты моторы квадрокоптера.
Все о ремонте квадрокоптеров
Квадрокоптеры начали пользоваться популярностью сравнительно недавно, поэтому полноценных сервисных центров еще нет. По этой причине при возникновении поломки пользователю приходится самостоятельно производить ремонтные работы. Ремонт дрона требует максимального внимания к деталям, а также сосредоточенности и наличия определенных знаний. Только в этом случае можно свести любые погрешности на нет и минимизировать негативные последствия.
Как разобрать квадрокоптер
Приступать к работам следует после отключения аккумулятора. Его я полностью достал из квадрокоптера. Далее необходимо снять пластиковые стойки с нижней стороны аппарата, они просто вытягиваются из отверстий в корпусе. В оставшихся отверстиях находится четыре болта.
После этого откручиваю два болта, крепящую пластиковую деталь над шестеренками. Это правая нижняя часть на рисунке, именно этот винт не крутится. Откручиваю винт, крепящий лопасть сверху, и снимаю ее.
Настраиваем режимы в betaflight
Настройка тумблеров — это была самая сложная часть, теперь осталось самое легкое.
Переходим на вкладку Modes в Betaflight Configurator.
Начнем с первого и самого важного — арминг (Arm). Нажимаем «Add Range» и выбираем AUX1 в выпадающем списке.
Нужно выбрать диапазон значений канала, при котором этот режим будет активен. Для двухпозиционного выключателя это 1500 — 2000. Для трехпозиционного я ставлю 1300 — 2000, так что в среднем и нижнем положениях коптер будет заармлен, как и показано на рисунке.
Для того, чтобы активировать Angle тем же тумблером, но в нижнем положении, нужно сделать так, как показано ниже:
Ну и в конце, настраиваем пищалку (beeper) на тумблер SG, который привязан к каналу AUX2.
Нажимаем «Save», на этом всё!
Настраиваем тумблеры в пульте
Режимы Betaflight можно активировать тумблерами на аппаратуре управления.
Вот руководство по настройке тумблеров в OpenTx (подойдет для Taranis X9D, QX7, Horus X10, Nirvana, X-Lite и т.д.). Если у вас другая аппаратура — придется погуглить руководство, их много.
В этом примере я буду использовать тумблер SD на канале AUX1 (канал 5), а SG на AUX2 (канал 6).
На Таранисе я предпочитаю использовать тумблер SD для арминга, а SG для пищалки. Ниже я покажу вам, как включить режим Angle с того же переключателя (SD), что и активирую коптер:
Настройка failsafe в betaflight
Если вы настроили Failsafe на приемнике и пульте, то в Betaflight ничего делать не нужно. Если же у вас нет таких функций в пульте и приемнике, либо вы хотите настроить failsafe в betaflight, а не на приемнике и пульте, то делаем следующее:
- Включите режим эксперта. После этого появится вкладка «Failsafe».
- Рекомендуется выбрать Drop. Land не рекомендуется включать новичкам и тем, кто не знает, как это работает.
- Можете также настроить время срабатывания функции (под цифрой 5). Актуально, если вы летаете над водоемом, чтобы было время экстренных мер.
Есть интересный, но важный момент: после срабатывания Failsafe, дрон не сможет заармиться (т.е. двигатели не включатся), пока вы не выключите и снова включите питание квадрокоптера. Актуально, если дрон после faisafe застрянет на дереве, то вам придется за ним лезть самому
Настройка failsafe в taranis
Перейдите на страницу настроек пульта Taranis, и прокрутите до пункта «Internal RF».
Рекомендуем выбрать режим «No Pulses». Также, есть и другие режимы, вот что они делают:
- Not set. При срабатывании режима, функция отключит двигатели и дрон просто упадет на землю.
- Hold. Удерживание — в момент срабатывания функция запоминает последнее положение стика газа и удерживает газ в этом же положении. Актуально для самолетов и монокрыльев, для квадрокоптеров включать этот режим не нужно. Пример: вы делаете трюк на дроне и в этот момент срабатывает failsafe — а дрон продолжает лететь (а если он вверх ногами был, то сразу в землю на скорости) в рандомную сторону.
- Custom. Пользовательский режим. Устанавливается определенный процент уровня газа и квадрокоптер будет плавно спускаться. Актуально, если вы успеете восстановить радиосвязь во время спуска. В другом случае, это опасный режим (как написано выше, работающие моторы без контроля — это опасно).
- No Pulses. При срабатывании failsafe, моторы отключатся и дрон упадет на землю. Идеальный вариант для гоночного квадрокоптера.
- Receiver. Failsafe сработает так, как будет настроен приемник.
Настройка failsafe на приемнике
Некоторые приемники автоматически настраивают failsafe во время первого связывания с пультом. В этот момент функция запоминает положение стика газа и применяет это положение в момент срабатывания. Failsafe в таком случае можно сбросить или перенастроить при повторной привязке.
Почти у всех приемников от FrSky на приемнике есть кнопка F / S или FS для настройки функции Failsafe. При ее нажатии, приемник запоминает положение стика газа. Чтобы моторы отключались во время срабатывания, перед нажатием кнопки убедитесь, что стик газа в нижнем положении.
Если вы не производили настройку по этой кнопке и установили в пульте Receiver в настройках failsafe, то приемник будет работать по умолчанию: при срабатывании функции, будет удерживаться последнее положение стика. По этой причине, обязательно нужно настроить failsafe на приемнике.
В инструкции к приемнику все объясняется пошагово:
- Сначала нужно забиндить (связать) приемник. Затем включить пульт и приемник.
- Переместите стик газа в нижнее положение.
- Нажмите и удерживайте кнопку F / S. Когда загорится зеленый светодиод — это будет означать, что failsafe настроен.
- Для повторной настройки failsafe или сброса настроек, нужно повторно забиндить приемник.
Обращение в сервисный центр по ремонту квадрокоптеров.
При отсутствии возможности самостоятельно произвести ремонт, возможно, пришло время обратиться в специализированный сервисный центр по ремонту квадрокоптеров. Если вы купили дрон у крупного производителя дронов, такого как DJI, то вам следует проверить, покрывает ли данный случай гарантийные обязательства производителя.
Ознакомьтесь с инструкцией по эксплуатации или проконсультируйтесь в Quadrone. Если окажется, что ремонт осуществим по гарантии, то мы его выполним за счет производителя. Если ремонт не выполним по условиям гарантии, то у нас есть все необходимые запчасти и вам вряд ли придется долго ждать, пока они появятся, как бывает в других неофициальных сервисах. Проведя тщательную диагностику, мы укажем точную стоимость ремонта квадрокоптера.
Ремонтируя дрон самостоятельно, удостоверьтесь, что своими действиями, вы не аннулируете гарантию производителя. Рекомендуем не разбирать беспилотник самостоятельно, не летать под дождем или врезаться в воду, модифицировать беспилотник с помощью неоригинальных запчастей или модифицированных деталей, или терять документ, подтверждающий покупку. Вы всегда можете купить у нас оригинальные запчасти для квадрокоптеров.
У нас много лицензированных специалистов DJI, Syma, Hubsan и даже собственные разработчики коммерческих беспилотных летательных аппаратов. Помимо прочего, Quadrone – официальный сервис, где всегда в наличии всегда оригинальные запчасти. Поэтому вам не придется долго ждать ремонта квадрокоптера, даже когда у нас очень большая загрузка. Обратившись за ремонтом дрона к нам, вы уже скоро будете снова управлять коптером.
Полезные ссылки:
Осмотреть корпус дрона
Когда вы найдете свой беспилотник, вы можете заметить, что на его поверхности есть грязь. Чистка дрона облегчает поиск любых повреждений, которые оказываются изначально скрытыми. Внимательно осмотрите весь корпус и раму для проверки на наличие трещин или разрывов.
Двигатели квадрокоптера производят много вибрации. Если какие-либо крепления двигателя ослаблены, вибрация будет резко увеличена. Любая незакрепленная арматура может привести к сотрясению, грохоту и крену вращающихся частей, таких как двигатели и пропеллеры, что приведет к нестабильной аэродинамической устойчивости вашего дрона.
Поиск неисправности дрона
Первое, в исправности чего возникли сомнения – двигатель. Для его проверки достаточно было подключить к источнику питания и проверить вращается ли он. Извлекаем из своего посадочного места, перекусываем два провода питания.
Питаются моторчики от Li Po (литий-полимерный) аккумулятора, напряжение на котором 3,7 вольт. Подключив к блоку питания, обнаружил, что мотор потребляет большой ток, около 2 ампер, но сам не вращается, зато происходит сильный его нагрев. Это говорит о том, что двигатель неисправен, его необходимо заменить.
Проверка и калибровка
Завершив ремонт, заменив мотор, свинчиваем корпус винтиками. Устанавливаем на свое место винт и крепим его. Не исключено, что для нахождения квадрокоптера в устойчивом горизонтальном положении необходимо будет откалибровать дрон с помощью пульта.
Запускаем его, установив на ровной поверхности пола. Видим – что моторчик вращается, игрушка готова взлетать в воздух.
Ради интереса решил разобрать старый неисправный моторчик. На обмотке явно видны следы сгоревшего провода.
Проверьте пропеллеры
Пропеллеры вращаются с высокой скоростью, перемещая воздух и создавая подъемную силу, которая заставляет ваш квадрокоптер находится в воздухе. Пропеллеры тщательно сбалансированы, чтобы на высоких скоростях они не создавали ненужных вибраций, которые могли бы затруднить или не сделать квадрокоптер непригодным для полетов.
Любые повреждения, такие как сколы или трещины, независимо от того, насколько они велики или малы, приведут к необходимости замены винтов. Когда ваш дрон падает, винты, скорее всего, будут повреждены. Столкновение со зданием, деревом или другими твердыми поверхностями, почти всегда приводит к повреждению незащищенных винтов. Это также может произойти из-за насекомых.
Обратите особое внимание на переднюю кромку лопасти. Любые зазубрины или сколы, независимо от их размера, могут повлиять на эффективность создания тяги пропеллеров.
Разборка и ремонт мотора квадрокоптера spl x5
Двигатель квадрокоптера SPL X5 очень маленький и стоит недорого, если покупать на алиэкспресс . Ребята в интернете пишут, что моторы неразборные и выдерживают всего лишь около 10 полетов — потом изнашиваются щетки. Но разобрать то хочется. Приступаю.
Моторчик плохо крутится и заедает. Имеет опрессовку в районе крепления пластиковой крышки.
Осмотр под микроскопом МБС-10 с головкой ОГМЭ-П3 показал, что металл корпуса двигателя весьма толстый. Фотографировал телефоном прямо через окуляр микроскопа.
Опрессовку мне отогнуть не удалось и даже не представляю как это сделать.
Разборка квадрокоптера spl x5
Чтобы разобрать квадрокоптер SPL X5 , нужно всего лишь открутить много саморезов, скрепляющих пластиковый корпус. Благо, с квадриком поставляется маленькая неудобная отвертка для этой процедуры. Крутил своей из китайского набора для ремонта смартфонов .
Что удивило внутри — провода моторов припаяли к плате, а светодиоды подсоединили через разъемы. Чем объяснить такое внимание к светодиодам непонятно. Особенно учитывая то, что из упаковки один из светодиодов у меня не горел. После перекоммутации разъема, светодиод горит исправно. Плата отмыта от флюса хорошо.
Обратите внимание на то, что крест накрест моторы имеют разные провода — синий с красным означает, что двигатель крутиться по часовой стрелке (правое вращение), а черный с белым — против часовой стрелки (левое вращение). Светодиоды тоже имеют свою маркировку проводов — красные обозначают перед квадрика, а зеленые — заднюю часть. Привыкнуть надо.
Также обратите внимание на разъем питания. Мало того, что он разболтан и ответная часть от аккумулятора в нем держится плохо и контакт может пропасть прямо во время полета квадрокоптера от вибраций. Пришлось отжимать подпружиненные контакты внутри разъема аккумулятора.
Режимы в betaflight
Чтобы взлететь, нужно активировать коптер (армить, заармить). Армим коптер и видим, что моторы начинают вращаться. Если параметр «MOTOR STOP» отключен, тогда моторы не начнут вращаться пока вы не дадите газу.
Армить коптер можно жестом стиками: газ минимум, рысканье вправо; либо настроить тумблер. Лучше конечно использовать тумблер (подробнее объясню в другой статье). Учтите, что при арминге тумблером, арминг стиками отключается.
Если арминг не работает, то читайте статью, в которой описаны основные проблемы и их решения (англ).
Рекомендации
Если вам повезло и, кроме определенной поломки, другие части устройства работают без проблем, то все равно необходимо провести дополнительные тесты, чтобы убедиться в том, что дрон в будущем сможет стабильно работать и не выйдет из строя.
Диагностика должна быть полной и тщательной. Необходимо снять все винты, установить другой аккумулятор, включить дрон и посмотреть на него. Разумеется, без винтов он не сможет взлететь, однако можно наблюдать за поведением двигателя, изучить исправность прошивки, датчиков и камеры.
Во время тестового полета после ремонта нужно держаться на минимальной высоте. Это позволит гарантировать целостность беспилотника в случае его падения. Кроме того, во время пробных испытаний не стоит выполнять сложные трюки. Вначале нужно убедиться в том, что все компоненты работают исправно, а потом уже можно маневрировать устройством.
Ремонт китайских мультикоптеров своими руками стоит производить крайне осторожно, так как данные устройства обычно не отличаются наличием полного руководства и специальных инструментов в комплекте.
Таким образом, ремонт квадрокоптеров представляет собой сложную задачу, к выполнению которой стоит подойти со всей ответственностью.
Перед тем как снова отправить дрон в полет, нужно проверить все его компоненты на исправность и убедиться в отсутствии любых возможных проблем.
Узнать о ремонте квадрокоптера подробнее вы можете в видео ниже.
Ремонт (замена) моторчика дрона
Ремонт квадрокоптера заключается в замене одного из его коллекторных двигателей. Подобрав аналогичный моторчик, устанавливаем шестеренку на вал. Налезать она должна с небольшим усилием.
Обрезаем провода до нужной длинны. Залуживаем их и спаиваем с теми, которые идут от квадрокоптера. Не забываю изолировать их с помощью термоусаживаемой трубки.
Двигатель с насаженной шестеренкой устанавливаем на свое место в корпусе квадрокоптера, следим при этом, чтобы зубья вошли в зацепление со второй шестеренкой.
Ремонт двигателя syma x5c
Снимите крышку корпуса, чтобы проверить, если ли проблема разъемами и соединением. Если что-то отсоединилось, то можно просто припаять проводок на место. Если же таких неполадок не выявлено, то нужно менять материнскую плату или какой-либо из двигателей коптера.
Чтобы выявить неисправность, попытайтесь подключать моторы поочередно. Возможно, вышли из строя не все двигатели, и нужно будет заменить лишь часть из них. Отсоедините неисправные моторы от системы.
На каждом квадрокоптере есть две пары разных по работе двигателей — одни совершают движение по часовой стрелке, а другие — против. На модели X5C они очень легко различимы по цветам проводов. Те, что крутятся по часовой стрелке синие и красные провода, против часовой — белые и черные.
[affegg id=45]
Новые запчасти можно найти в интернете. Для Syma X5C они не будут стоить дорого. Останется только дождаться детали. Ускорить доставку можно, заплатив курьерской службе.
Когда у вас будут все необходимые детали, проверьте наличие инструментов и других материалов, которые вам также понадобятся при ремонте:
- Отвертка;
- Кусачки;
- Паяльник;
- Вольтметр;
- Олово, свинец, смола для пайки;
- Запасные части для замены неисправных компонентов;
При замене моторов вы должны обратить внимание на полярность моторов. Нужно припаять провода двигателя к плате приемника в следующем порядке:
- Двигатель M1 (против часовой стрелки) — от белого до M1 и черный M1-
- Двигатель M2 (по часовой стрелке) — Красный к M2 и синего М2-
- Двигатель M3 (против часовой стрелки) — от белого до M3 и черный M3-
- Мотор M4 (по часовой стрелке) — Красный к M4 и синего до М4-
После того как вы припаяли обратно новые моторы, включите квадрокоптер, чтобы увидеть, если все двигатели вращаются свободно и правильно. Если все в порядке, то смело завинчивайте обратно все болты корпуса и наслаждайтесь полетами.
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Шаблоны Инстаграм БЕСПЛАТНО
Хотите получить БЕСПЛАТНЫЙ набор шаблонов для красивого Инстаграма?
Напишите моему чат-помощнику в Telegram ниже 👇
Вы получите: 🎭 Бесплатные шаблоны “Bezh”, “Akvarel”, “Gold”
Telegram Viber Vkontakte
или пишите “Хочу бесплатные шаблоны” в директ Инстаграм @shablonoved.ru
Ремонт мотора квадрокоптера spl x5 (syma x5)
Приветствую, мои любимые читатели! Сегодня я покажу почти завершенный ремонт мотора квадрокоптера SPL X5, он же Syma X5. Следующая модель SPL X5С, как и Syma X5C, отличается только наличием видеокамеры, так что эту инструкцию можно и к ним применять.
Итак, что случилось? Подарили мне этот квадрик чисто на поучиться. После где-то 15 запусков по 5 минут и пары падений, перестал крутиться один винт. После этого я еще пару запусков делал с тремя пропеллерами. Четвертый иногда еще крутился. Потом отказали еще два мотора квадрокоптера. Пришлось разбирать и вскрывать двигатель SPL X5. Посмотрите что из этого получилось.
Следы износа двигателя квадрокоптера spl x5
Еще раз смотрим на ось якоря мотора — она сделана из пластика с металлическими ламелями. Неудивительно, что он погнулся скорее всего от перегрева. Также с нагревом и пинцетом его можно выправить обратно.
Дальнейший осмотр обмотки мотора показал, что медная проволока притерта к корпусу в некоторых местах. Это могло привести к межвитковым замыканиям и неправильной работе двигателя.
Вся проволока залита лаком, поэтому держит форму. Это даже с учетом того, что внутри предусмотрено место под магнит.
Средние цены на ремонт квадрокоптеров dji phantom
| Наименование ремонта | Среднее время ремонта | Средняя цена, руб |
| Ремонт и замена GPS модуля | 60 минут | 3000 |
| Замена NAZA | 50 минут | 3000 |
| Ремонт и замена мотора | 60 минут | 2000 |
| Ремонт корпуса, замена компонентов | 120 минут | 4000 |
| Замена компаса | 50 минут | 2000 |
| Ремонт и замена подвеса VISION | 180 минут | 5000 |
| Ремонт и замена подвеса ZENMUSE | 120 минут | 3000 |
| Ремонт и замена регулятора вращения | 180 минут | 3500 |
| Ремонт и замена деталей центральной платы | 120 минут | 5000 |
| Ремонт и замена Шасси | 40 минут | 1000 |
| Замена шлейфа | 50 минут | 3000 |
| Установка и модернизация FPV системы | 120 минут | 3000 |
| Установка бустера | 50 минут | 3000 |
| Установка DJI Light Bridge | 220 минут | 3000 |
| Установка и подключение DJI Bluetooth Ground Station | 60 минут | 3000 |
| Установка подвесов ZENMUSE | 80 минут | 3000 |
| Ремонт камера VISION | 40 минут | 3000 |
| Ремонт подвеса Vision Plus | 180 минут | 3000 |
| Модернизация прошивки и калибровка | 40 минут | 1000 |
Как видите ремонт квадрокоптера может оказаться удовольствием не из дешевых, но все же если вас настигла такая участь как сломанный дрон, то обращайтесь за помощью в сервисные центры или к частным мастерам. У этих ребят однозначно есть необходимые запчасти и лицензионные программы для перепрошивки.
Я же вам желаю всего доброго, и обращайтесь к своим летающим товарищам бережно.
Фильтрация
Процесс фильтрации заключается в удалении лишнего шума из сигнала от гироскопа. Но какую часть сигнала от гироскопа мы хотим оставить, а какую отфильтровать?
Честно не могу вам в красках рассказать, но так сложилось, что в бетафлайт, шум, а точней вибрации измеряются в Hz. 1Hz — одна ротация в секунду. Делается это как для простоты визуализации и работы с этими переменными. А еще, турбулентность технически называется «rate of change of rotation» — частота изменения ротации.
Скорость движения квадрокоптера лежит в районе 0-30 Hz. Выше 30Hz до 80Hz у нас находится пропвош (propwash), когда квадрокоптер трясет от турбулентности в собственных потоках. Информация в пределах 0 — 80Hz важна для PID контроллера, поэтому ее мы трогать не будем.
С помощью PIDtoolbox можно рисовать вот такие карты:
Чистка мотора квадрокоптера
А вот и причина выхода из строя похоже — подпружиненные металлические усики являются щетками для якоря мотора. С одной стороны вместо трех контактов осталось два, один из которых стал очень тонким в месте контакта с осью якоря.
Все это настолько хлипкое и сопливое, что страшно прикасаться. А подпружиненность сохраняется знаете как? Налили просто каплю какого-то упругого желтого герметика в места изгиба ламелей. Хитрые китайцы.
Чтобы реанимировать моторчик я решил почистить спиртом щетки от следов износа и окалины. Такой ремонт мотора квадрокоптера можно назвать бесплатным. Ламели помазал силиконовым маслом ПМС-100 и почистил корпус и якорь от металлической стружки. Не уверен, что все вычистил.
Настало время сборки мотора. Тут главное — это попасть осью якоря между ламелями щеток, не повредив их. Скажу сразу, что у меня это не получилось — после пары поворотов оси собранного двигателя понял, что что-то не так. Открыв, увидел скрученные в дулю щетки.
Даже не стал это выправлять. Заказал новые моторчики для Syma X5 . Они отлично подходят к SPL X5. По приходу отпишусь. В ответ прошу подсказать кто как ставит на место якорь в подпружиненными металлическими щетками.
На этом мой безуспешный ремонт мотора квадрокоптера SPL X5, он же Syma X5 завершен. У меня осталось еще пару нерабочих двигателей — попробую повторить последовательность.
Вот видео как летает такой квадрокоптер на улице.





 купить по привлекательной цене 46990 руб. в Москве")