

- Виды квадрокоптеров
- Виды квадрокоптеров: классификация по размерам
- Для чего нужен квадрокоптер
- Зарубежные беспилотники
- Защитные конструкции
- История развития бпла
- Области применения квадрокоптеров
- Отечественные бпла
- Проблемы управления
- Система управления пространственным положением остронаправленных антенных систем в комплексах бла — киберпедия
- Три кейса для силовых структур
- Энтомоптеры.
Виды квадрокоптеров
Летающие дроны можно разделить на несколько категорий:
- Дроны без камеры. Характеристики у квадрокоптеров бюджетного сегмента невысокие, модели поддерживают малую дальность полета и способны оставаться в воздухе около десяти минут. Проводить съемку с их помощью нельзя, но можно просто получать удовольствие от пилотирования и выполнять маневрирование.

Дешевые коптеры без камеры покупают обычно для детей - Коптеры с камерой. Стоят такие модели дороже, зато предоставляют возможность снимать видео и фото в процессе полета.

Хорошее качество изображения предоставляют дроны для съемки с разрешением от 5 Мп и выше - Для новичков. Недорогие, но очень прочные модели способны переживать многократные падения. Оснащаются коллекторными двигателями, дальность полета составляет около 100 м, часто есть встроенный акробатический режим.

Коптеры для начинающих обычно поставляются с защитой винтов - Для любителей. Такие модели поддерживают съемку с разрешением не менее 720р и стабилизацию, способны удаляться на 1 км от оператора и удерживаются в полете до 25 минут. Обычно способны развивать скорость до 70 км в час.

Любительские дроны оснащаются GPS-модулем и несколькими режимами полета - Для профессионалов. Самые функциональные дроны поддерживают спутниковую навигацию, ведут съемку в формате 4К. Изображение передают на смартфон с расстояния в несколько километров или записывают на карту памяти. Оснащены многочисленными датчиками, в том числе для отслеживания препятствий, стоят довольно дорого.

Профессиональные дроны чаще оборудованы выносными, а не встроенными камерами - Гоночные. Такие модели предназначены в первую очередь для маневрирования. Видео об устройстве квадрокоптеров гоночного типа показывают, что камера в них может быть довольно скромной, а вот скорость дроны развивают вплоть до 120 км в час. Удаляются обычно на 1 км от владельца, многие модели поддерживают управление через видео-очки.

Многие гоночные дроны выполнены в обтекаемом корпусе
При выборе летающего дрона следует учитывать, для каких именно целей он нужен — для съемки или акробатических трюков.
Виды квадрокоптеров: классификация по размерам
Одним из основных критериев выбора коптера считаются его габариты. Одним пользователям нравятся маленькие квадрокоптеры. Он просты в управлении (обучение обращению с квадрокоптером редко длится более получаса), занимают мало места, а их приобретение обычно обходится достаточно дешево.
Большим плюсом является отсутствие сложностей в организационном плане. Например, покупателям не нужно думать, как зарегистрировать квадрокоптер. Можно просто купить и наслаждаться его функционалом на частной территории. Самые большие (профессиональные) аппараты необходимо регистрировать. Зато они открывают обширные возможности – как в плане функционала, так и в плане удобства эксплуатации.
Классификация квадрокоптеров по габаритам выглядит следующим образом:
- Мини. Небольшое устройство со скромным радиусом действия. Обычно используется как игрушка – в помещении или во дворе. К достоинствам аппарата можно отнести высокую маневренность, к недостаткам – невозможность полноценного использования при сильных порывах ветра.
- Маленький. Такой коптер быстр и удобен в управлении, благодаря чему его используют не только для баловства или съемки ландшафта, но и для любительских гонок на любой местности – как на равнинах, так и в лесу.
- Средний. Характеризуется оптимальным сочетанием маневренности и грузоподъемности. Плюсом является устойчивость к порывам ветра. Используется как для продолжительной съемки, так и для проведения гонок на высоких скоростях.
- Тяжелый. Имеет тяжелый массивный корпус, за счет чего считается самым надежным решением, но значительно уступает более мелким моделям в маневренности. Такой аппарат можно применять для съемок в неблагоприятных условиях и для кратковременных перевозок небольших грузов.
Для начинающих «летчиков», еще не знающих, как настроить квадрокоптер, больше подойдут маленькие модели. Опытным пользователям однозначно понравятся более тяжелые аппараты. Слишком уж много возможностей они открывают перед профессиональными «пилотами».
Для чего нужен квадрокоптер
Активное развитие и внедрение коптеров в гражданскую среду, привели к росту вариантов использования:
- Пассажирские перевозки — так, в Дубаи, на международном саммите была продемонстрирована модель беспилотного такси Ehang 184, которое может находиться в воздухе около 30 минут за один полёт. По сути это одноместный восьми-роторный аппарат, который лишен каких-либо органов управления, т.е. фактически человек летит в этом аппарате в качестве пассажира, а не пилота. В небольшой кабине располагается кресло и планшет с сенсорным экраном, используя который вы можете указать пункт назначения. В 2023 году первый тестовый полет совершило аэро-такси Vahana компании Airbus. В феврале этого же года, сообщили о секретном аэро-такси Joby Aviation, стартап проекта уже привлек 100 млн долларов.
- Хозяйственная деятельность — дроны берут на себя отдельные функции авиации: проведение аэросъёмки или других видов сбора данных, нужных для сельского хозяйства, контроля ситуаций на дорогах и в любых удалённых участках. С их помощью отслеживают пути миграции животных, находят затерявшиеся суда, выявляют уровень гидрометеорологической опасности, проводят обследование линий электропередач.
- Развлекательные / спортивные шоу — такие аппараты чаще всего оснащаются несущими винтами и являются подобием вертолётов, а не самолётов. Данная конструкция наиболее рациональная, поскольку не требует наличия взлётно-посадочной полосы. Развлекательное использование БПЛА недавно расширилось воздушными гонками. Чаще всего для них используются модели самостоятельной сборки или существенно переработанные готовые. В результате они получают возможность набирать скорость выше 150 км/ч, но относятся к аппаратам с малыми габаритами. Отметим, что стартап Alauda Racing запустил на платформе Kickstarter сбор средств на первые в мире гонки на пилотируемых мультикоптерах, которые планируются в 2020 году.
- Профессиональная или любительская фотосъемка — все современные модели оснащаются высококачественной камерой и позволяют делать восхитительные снимки там, куда человек не смог бы никогда добраться самостоятельно.
- Грузовые перевозки — в 2023 году компания Amazon провела испытания по доставке посылок с помощью коптера и подала заявку на технологию доставки груза при помощи парашюта. В последние месяцы активно появляются новости с концептами больших грузовых беспилотников, способных перемещаться на высоких скоростях и перевозить до нескольких тонн. Как, например, модель Draco-2 компании Sabrewing Aircraft и тестовая сборка компании Boeing.
Зарубежные беспилотники
Одним из направлений в развитии БПЛА является уменьшение их габаритов без существенного ущерба для технических характеристик. Норвежская разработала микро дрон ПД-100 Блэк Хорнет вертолетного типа.
Данный беспилотник может работать около четверти часа на расстоянии до 1 км. Этот робот применяется в качестве индивидуального разведывательного средства солдата и оснащен тремя видеокамерами. Используется некоторыми регулярными подразделениями США в Афганистане с 2023 года.
| ТТХ Блэк Хорнет | |
| Длина | 100 мм. |
| Вес | 120 гр. |
| Дальность полета | 1000 м. |
| Время работы | 25 мин. |
| Оснащение | 3 оптические видеокамеры с разрешением в 3 МП |
Самый распространенный беспилотник армии США — РКью-11 Рэйвен. Его запуск производится с руки солдата и для его приземления не требуется специальной площадки, он может летать как в автоматическом режиме, так и находясь под управлением оператора.
Этот легкий беспилотник солдаты США применяют при решении задач ближней разведки на уровне роты.
| ТТХ РКью-11 Рэйвен | |
| Длина, мм | 790 |
| Вес, гр. | 1800 |
| Размах крыла, м | 1.5 |
| Дальность полета, км | до 5 |
| Силовая установка | Электродвигатель |
| Время работы, мин | 45…60 |
| Оснащение | цифровая видеокамера дневного обзора, камера ночного видения |
Более тяжелые БПЛА американской армии представляют РКью-7 Шэдоу и РКью-5 Хантер. Оба образца предназначены для производства разведки местности на уровне бригады.
Беспрерывное время работы в воздухе этих беспилотников существенно отличается от более легких образцов. Существуют множественные их модификации, некоторые из которых включают в себя функции подвешивания на них небольших управляемых бомб массой до 5.4 кг.
МКью-1 Предатор — это самый известный американский дрон. Изначально его основной задачей, как и у многих других образцов, была разведка местности. Но вскоре, в 2000 году, производители внесли в его конструкцию ряд модификаций, позволяющих ему выполнять боевые задачи, связанные с непосредственным уничтожением целей.
Помимо подвешиваемых ракет (Хеллфайр-С, созданные специально для этого беспилотника в 2001 году), на борту робота установлены три видеокамеры, инфракрасная система и своя бортовая радиолокационная станция. Сейчас существуют несколько модификаций МКью-1 Предатора для выполнения задач самого различного характера.
В 2007 году появился еще один ударный БПЛА—американский МКью-9 Рипер. По сравнению МКью-1 Предатор его показатель продолжительности полета был намного выше, а также помимо ракет мог нести на борту управляемые авиабомбы и имел более современную радиоэлектронику.
| Вид БПЛА | МКью-1 Предатор | МКью-9 Рипер |
| Длина, м | 8.5 | 11 |
| Скорость, км/ч | до 215 | до 400 |
| Вес, кг | 1030 | 4800 |
| Размах крыла, м | 15 | 20 |
| Дальность полета, км | 750 | 5900 |
| Силовая установка, двигатель | поршневой | турбовинтовой |
| Время работы, ч | до 40 | 16-28 |
| Ракетная/бомбовая нагрузка | до 4-х ракет Хеллфайр-С | бомбы до 1700 кг |
| Практический потолок, км | 7.9 | 15 |
Самым большим БПЛА в мире по праву считается РКью-4 Глобал Хоук. В 1998 году он впервые поднялся в воздух и по сей день выполняет задачи разведывательного характера.
Этот дрон — первый в истории робот, который может использовать воздушное пространство и воздушные коридоры США без разрешения органа управления воздушным движением.
| ТТХ РКью-4 Глобал Хоук | |
| Длина, м | 13.3 |
| Размах крыла, м | 35 |
| Дальность полета, км | 22 000 |
| Вес, т | 15 |
| Силовая установка | Турбовентиляторный двигатель |
| Оснащение | ИК-система, комплекс для веденияразведки, РЛК-комплекс |
| Время работы, ч | 36 |
| Практический потолок, км | 18 |
Защитные конструкции
Наиболее прямолинейный подход избежать последствий падения или столкновения БПЛА — защитная клетка и прочие защитные конструкции. Здесь две задачи — защищать дрон от повреждений и защищать среду, где работает дрон, и людей в ней от дрона.
Базовый вариант конструкции, относящейся скорее к защите людей от дрона, — защита пропеллера.

Дрон AR.Drone 2.0 с защитой пропеллеров. Источник
Есть еще забавные решения, вдохновленные оригами, со складными гибкими конструкциями защиты пропеллеров (и даже конструкции рамы), развитие которым дала группа профессора Дарио Флореано в EPFL.
Превалирующей конструкцией защиты самого дрона (а вместе с тем и людей от него) является защитная клетка. Сам квадрокоптер находится внутри клетки.
Дрон Clover от российской COEX
Российская компания COEX делает дроны для учебных целей, которые по умолчанию имеют защиту пропеллеров, а опционально — защитную клетку.
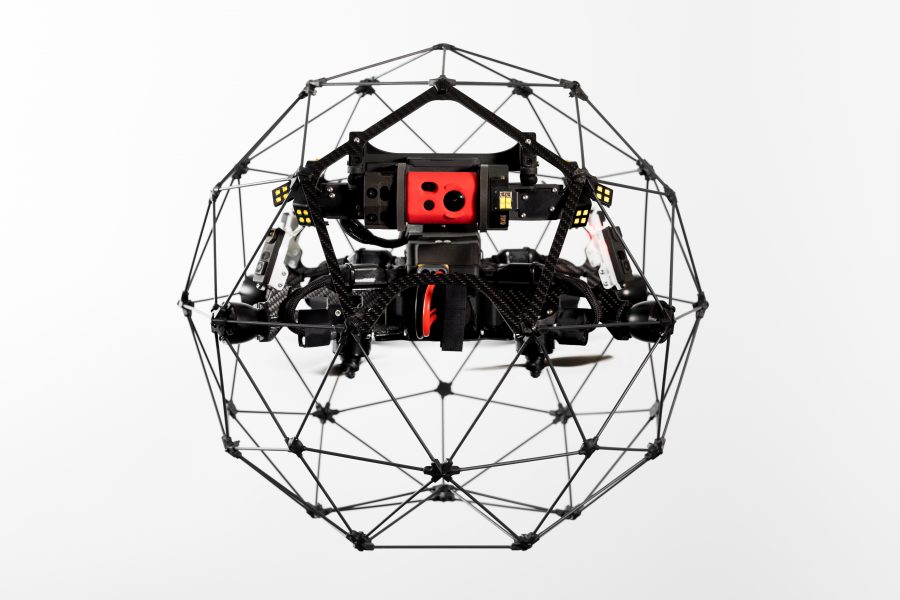
Дрон Flyability ELIOS
Швейцарская (Швейцария — столица дроностроения?) компания Flyability — выпускает, пожалуй, самый коммерчески успешный коптер ELIOS с защитной клеткой для выполнения инспекций внутри помещений. Оригинальность конструкции состоит в креплении защитной клетки к раме коптера на подвижном подвесе с возможностью стабилизации.

Дрон Dronistics
Стартап Dronistics из EPFL (опять Швейцария, это выходцы из группы Dario Floreano) предлагает дрон со складной клеткой для безопасной доставки грузов.
Недостатком таких дронов является увеличение массы конструкции — нужно носить с собой защитную клетку и элементы крепления к БПЛА. Стремление снизить массу защитной конструкции приводит к снижению ее прочности.
История развития бпла
Человека достаточно давно посетила мысль о создании такой машины, которой можно было бы, без вреда для себя, управлять на расстоянии. Спустя 30 лет после первого полета братьев Райт эта идея воплотилась в реальность, и в 1933 году в Великобритании был построен специальный самолет на дистанционном управлении.
Фэйри Куин может по праву считаться первым БПЛА современной истории, и англичане использовали этот аппарат в качестве учебной мишени, для тренировки своих зенитчиков.
Первым дроном, принявшим участие в боях был немецкий ФАУ-1. Это была радиоуправляемая ракета с реактивным двигателем. Она была оснащена автопилотом, в который немецкие операторы вводили информацию о предстоящем полете. За годы Второй мировой войны эта ракета успешно выполнила около 20 тыс. боевых вылетов, нанося авиаудары по важным стратегическим и гражданским объектам Великобритании.
После окончания Второй мировой, США и Советский Союз по ходу растущих взаимных претензий друг к другу, ставшими плацдармом для начала холодной войны, начали выделять огромные деньги из бюджета на развитие беспилотных летательных аппаратов.
Так, во время ведения боевых действий во Вьетнаме, обе стороны активно применяли БПЛА, для решения различных боевых задач. Радиоуправляемые аппараты делали аэрофотоснимки, вели радиолокационную разведку и их применяли в роли ретрансляторов.
В 1978 году случился настоящий прорыв в истории развития беспилотников. ИАИ Скаут был представлен военпредами Израиля и стал первым в истории боевым БПЛА.
А в 1982 году, во время войны в Ливии этот дрон практически полностью уничтожили сирийскую систему ПВО. Во время ведения тех боевых действий армия Сирии потеряла 19 зенитных батарей и было уничтожено 85 самолетов.
После этих событий американцы стали уделять максимум внимания к разработке дронов, и в 90-х годах стали мировыми лидерами в области применения беспилотных летательных аппаратов.
Дроны активно использовались в 1991 году во время «Бури в пустыне», а также в ходе военных операции на территории Югославии в 1999 году. Сейчас на вооружении армии США стоит около 8,5 тыс. радиоуправляемых дронов и это в основном малогабаритные БПЛА для выполнения разведывательных задач в интересах сухопутных войск.
Области применения квадрокоптеров
Недорогие модели квадрокоптеров (например, мини квадрокоптеры с камерой) зачастую применяются ради развлечения владельцев, в том числе для проведения любительских съемок. Многие люди с детства мечтали увидеть мир с высоты птичьего полета и сейчас воплощают мечты путем эксплуатации беспилотников.
Такие владельцы квадрокоптеров ежедневно совершают своеобразные виртуальные путешествия, снимая окрестности и наслаждаясь незабываемым видом различных красот, находясь в произвольно выбранном месте.
Квадрокоптер с камерой и трансляцией на пульт ДУ позволяет делать все перечисленное практически на интуитивном уровне. К тому же управление беспилотником сложностей не вызывает, а запас энергии в аккумуляторе позволяет устройству находиться в воздухе до 10-40 минут (в зависимости от модели).
Возможны и более практичные применения квадрокоптеров:
- Борьба с преступностью. В развитых странах беспилотники используют для инспектирования мест ДТП, выслеживания преступников, контроля толпы на митингах и подобных мероприятиях.
- Изучение аварийных объектов. Коптеры удобно применять для осмотра пострадавших сооружений промышленного и другого назначения. В опасных ситуациях рисковать людьми нерационально. Оценку ущерба и анализ ситуации можно провести с помощью беспилотников.
- Помощь в сельском хозяйстве. Квадрокоптеры, оборудованные тепловизорами и специальными датчиками, применяют для контроля эффективности работы автоматизированных систем орошения и удобрения, а также для мониторинга состояния культур.
- Съемка спортивных событий. Надежный квадрокоптер с камерой и трансляцией видео на пульт или экран уже стал незаменимой вещью во время футбольных матчей. Его использование позволяет оценивать ситуацию на поле с различных ракурсов. Аналогичный подход практикуют и при съемке других спортивных дисциплин.
- Продажа и аренда недвижимости. Съемка с помощью квадрокоптера позволяет представить объект в лучшем свете, показать все преимущества ландшафта и даже дать информацию о соседях.
Также квадрокоптеры активно применяют в военном деле (в том числе для разведки и охраны объектов). Военные нередко оснащают беспилотники дорогостоящим высокоточным оборудованием, позволяющим получать детальную картинку местности в режиме реального времени. Дополнительно коптеры оборудуют системами распознавания лиц и другими приборами для идентификации личности.
Используют квадрокоптеры и в спасательных миссиях. Периодически жизнь людей и сохранность ценного имущества зависят от точности планирования операции. В таких случаях коптеры позволяют оперативно собрать нужные разведданные и организовать мероприятия с учетом всех особенностей местности.
Отечественные бпла
Российские беспилотники условно подразделяют на следующие категории
| Ближнего радиуса действия | До 25 км |
| Малой дальности | От 50 до 100 км |
| Средней дальности | От 100 до 500 км |
| Большой дальности | Свыше 500 км |
БПЛА «Элеон-ЗСВ» относится к аппаратам ближнего радиуса действия, он довольно прост в эксплуатации и его легко переносить в заплечном ранце. Запускается дрон вручную со жгута или сжатым воздухом от насоса.
Способен вести разведку и передавать информацию по цифровому видеоканалу на расстоянии до 25 км. Элеон-10В схож по конструкции и правилам эксплуатации с предыдущим аппаратом. Главное их отличие — увеличение дальности полета до 50 км.
Процесс приземления этих БПЛА осуществляется при помощи специальных парашютов, выбрасываемых при выработке дроном своего заряда батареи.
| Вид БПЛА | Элеон-3СВ | Элеон-10В |
| Длина, мм | 740 | 1150 |
| Вес, кг | 4.3 | 5.9 |
| Скорость, км/ч | 70…100 | 75…135 |
| Дальность полета, км | 25 | 50 |
| Время работы, ч | 1.5…2 | 2.5 |
| Практический потолок, км | 5 | 5 |
Рейс-Д (Ту-243) — разведывательно-ударный дрон, способный нести на себе авиавооружение массой до 1 т. Аппарат, выпущенный конструкторским бюро имени Туполева, свой первый полет совершил в 1987 году.
С тех пор беспилотник претерпел множественные улучшения, были установлены: усовершенствованный пилотажно-навигационный комплекс, новые приборы ведения радиолокационной разведки, а также конкурентоспособная оптическая система.
Иркут-200 — больше ударный беспилотник. И в нем в первую очередь ценится высокая автономность аппарата и маленькая масса, благодаря которой могут осуществляться перелеты продолжительностью до 12 часов. Приземляется БПЛА на специально оборудованную площадку длиной около 250 м.
| Вид БПЛА | Рейс-Д (Ту-243) | Иркут-200 |
| Длина, м | 8.3 | 4.5 |
| Вес, кг | 1400 | 200 |
| Силовая установка | турбореактивный двигатель | ДВС мощностью 60 л. с. |
| Скорость, км/ч | 940 | 210 |
| Дальность полета, км | 360 | 200 |
| Время работы, ч | 8 | 12 |
| Практический потолок, км | 5 | 5 |
Скат — тяжелый БПЛА большой дальности нового поколения разрабатываемый КБ МиГ. Этот дрон будет малозаметен для вражеских радаров, благодаря схеме сборки корпуса, исключающей хвостовое оперение.
Задачей этого дрона нанесение точных ракетно-бомбовых ударов по наземным целям, таким как зенитные батареи войск ПВО или стационарные командные пункты. По задумке разработчиков БПЛА Скат сможет выполнять задачи как автономно, так и в составе звена самолетов.
| Длина, м | 10,25 |
| Скорость, км/ч | 900 |
| Вес, т | 10 |
| Размах крыла, м | 11,5 |
| Дальность полета, км | 4000 |
| Силовая установка | Двухконтурный турбореактивный двигатель |
| Время работы, ч | 36 |
| Ракетная/бомбовая нагрузка | Корректируемые авиабомбы 250 и 500 кг. |
| Практический потолок, км | 12 |
Проблемы управления
Основная проблема управления по сравнению с обычным жестким дроном — вибрации, которые, во-первых, больше по амплитуде, во-вторых, разные для контроллера и различных двигателей, т.к. они установлены на различных балках (хотя это же может быть и плюсом — виброразвязка).
Ранние тесты тенсодрона на подвесе: вибрации (извините за вертикальное видео)Ранние тесты тенсодрона в полете: вибрации
Оказывается, у нас был конкурент.
Еще в начале (почти год назад), когда мы делали прототип, мы нашли это видео от ребят из Imperial College London:
Авторы пришли к той же идее, что и мы: применение тенсегрити для дронов — это интересно.
Т.к. никаких подробностей по конструкции и, тем более, прототипа представлено не было, свои работы мы продолжили.
Уже потом, когда у нас был летающий образец, мы получили отчет той же группы:
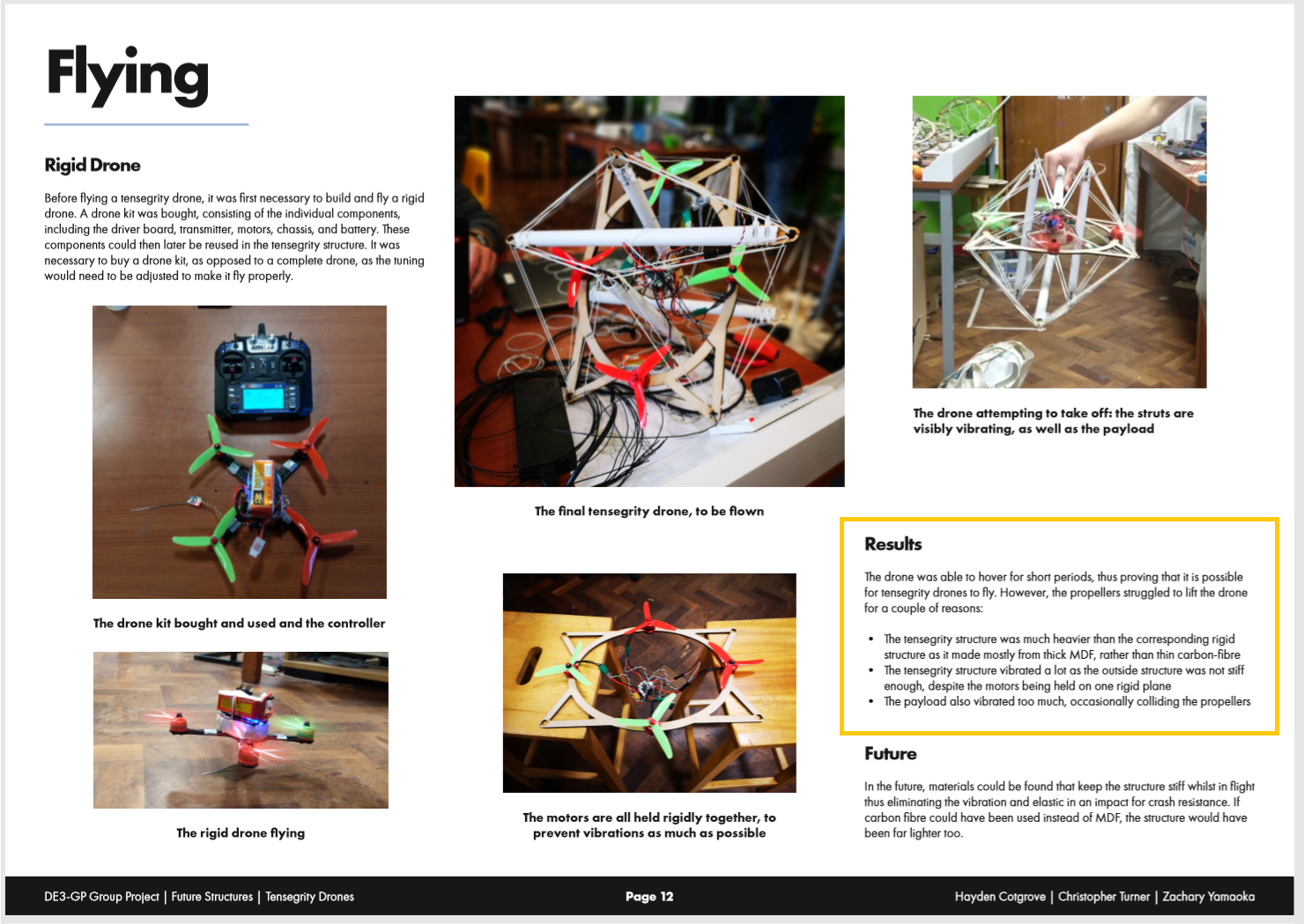
Отчет Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones. Ссылка уже не работает
Во-первых, прототип у них не полетел. Во-вторых, их конструкция — это жесткий дрон внутри тенсегрити-клетки, у нас же элементы дрона встроены в тенсегрити-структуру, которая тем самым является и фреймом и клеткой одновременно. Таким образом, здесь как концептуальные проблемы, так и проблемы качественной реализации.
Возвращаемся к проблемам управления и вибрации. Вот, что написано в отчете Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
Данные проблемы мы решаем с двух сторон — улучшением конструкции для уменьшения вибраций при полете и разработкой алгоритмов управления и оценивания состояния с целью подавления вибраций и более качественного управления, в том числе с учетом дополнительных данных от IMU датчиков на балках и динамической модели тенсегрити-структуры.
Падение на пол с последующим взлетом, в помещении (без монтажа)
Система управления пространственным положением остронаправленных антенных систем в комплексах бла — киберпедия
Сам по себе беспилотный летательный аппарат (БЛА) – лишь часть сложного комплекса, одна из основных задач которого – оперативное доведение полученных сведений до оперативного персонала пункта управления (ПУ). Возможность обеспечения устойчивой связи является одной из важнейших характеристик, определяющих эксплуатационные возможности комплекса управления БЛА и обеспечивает доведение сведений, полученных БЛА, в режиме «реального времени» до оперативного персонала ПУ. Для обеспечения связи на значительные расстояния и повышения помехозащищенности за счет пространственной селекции в комплексах управления БЛА широко используются остронаправленные антенные системы (АС) как на ПУ, так и на БЛА. Функциональная схема системы управления пространственным положением остронаправленной АС, обеспечивающая оптимизацию процесса вхождения в связь в комплексах управления БЛА, приведена на рис. 1.
Система управления остронаправленной АС (см. рис. 1) включает в себя:
• Собственно остронаправленную АС, радиотехнические параметры которой выбираются, исходя из требований обеспечения необходимой дальности связи по радиолинии.
• Сервопривод АС, обеспечивающий пространственную ориентацию ДН АС в направлении ожидаемого появления излучения объекта связи.
• Систему автоматического сопровождения по направлению (АСН), обеспечивающую устойчивое автосопровождение объекта связи в зоне уверенного захвата пеленгационной характеристики системы АСН.
• Радиоприемного устройства, обеспечивающего формирование сигнала «Связь», свидетельствующего о приеме информации с заданным качеством.
• Процессор управления антенной системой, обеспечивающий анализ текущего состояния системы управления АС, формирование сигналов управления сервоприводом для обеспечения пространственной ориентации АС в соответствии с полетным заданием и алгоритмом пространственного сканирования, анализ наличия связи, анализ возможности перевода сервопривода АС из режима «Внешнее управление» в режим «Автосопровождение», формирование сигнала перевода сервопривода АС в режим «Внешнее управление».

Рис. 1. Функциональная схема системы управления пространственным положением остронаправленной АС в комплексах управления БЛА
Основная задача, выполняемая системой управления пространственным положением остронаправленной АС, – обеспечить устойчивое вхождение в связь с объектом, заданным полетным заданием.
Эта задача распадается на ряд подзадач:
• Обеспечение пространственной ориентации ДН АС в направлении ожидаемого появления излучения объекта связи и ее пространственной стабилизации для случая расположения АС на борту летательного аппарата.
• Расширение зоны устойчивого захвата излучения объекта связи за счет применения дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой.
• Переход в режим устойчивого автосопровождения объекта связи системой АСН при обнаружении объекта связи.
• Обеспечение возможности повторного вхождения в связь в случае ее срыва. Для дискретного алгоритма пространственного сканирования с детерминированной пространственно-временной структурой можно выделить следующие особенности:
• Сканирование ДН АС осуществляется дискретно во времени и в пространстве. • Пространственные перемещения ДН АС при сканировании осуществляются таким образом, чтобы не оставалось пространственных зон, которые не перекрываются зоной уверенного захвата система АСН за весь цикл сканирования (см. рис.2).
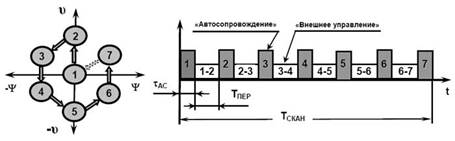
Рис.2. Пример организации дискретного пространственного сканирования в азимутальной и угломестной плоскостях
Для каждого конкретного пространственного положения, определяемого алгоритмом сканирования, можно выделить две фазы: «Автосопровождение» и «Внешнее управление».
• В фазе «Автосопровождение» система АСН осуществляет оценку возможности приема излучения объекта связи для выбранного пространственного положения РСН.
В случае положительного результата оценки: Пространственное сканирование прекращается. Система АСН продолжает осуществлять автосопровождение излучения объекта связи по своему внутреннему алгоритму. На вход сервопривода АС поступают сигналы пространственной ориентации АС по данным текущего пеленга объекта связи от системы АСН XАСН(t). В случае отрицательного результата оценки: Осуществляется пространственное перемещение РСН АС в следующее пространственное положение, определяемое алгоритмом сканирования.
• В фазе «Внешнее управление» на выходе процессора управления антенной системой формируются сигналы управления сервоприводом АС. Компоненты сигнала управления сервоприводом обеспечивают:
X0 – первоначальную пространственную ориентацию ДН АС в направлении на объект связи; ∆XЛА(t)–парирование пространственных эволюций летательного аппарата; XАЛГ(t) – расширение зоны устойчивого захвата излучения объекта связи системы АСН в соответствии с дискретным алгоритмом пространственного сканирования с детерминированной пространственно-временной структурой.
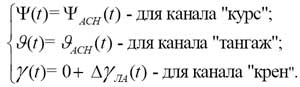
В случае срыва связи, начиная с момента времени ТСВ=0 (пропадание сигнала «СВЯЗЬ»), сигнал XАСН(ТСВ=0) запоминается в устройстве «Вычисления и хранения», и используется в дальнейшем процессором управления АС в качестве значения ожидаемого пеленга объекта связи. Процесс вхождения в связь повторяется как описано выше. В режиме «Внешнее управление» сигнал управления сервоприводом остронаправленной АС по каналам «курс», «тангаж» и «крен» может быть записан
 (1)
(1)
В режиме «Автосопровождение» сигнал управления сервоприводом остронаправленной АС может быть записан
 (2)
(2)
Конкретный вид сигналов управления определяется конструктивными особенностями сервопривода антенной системы.
Инерциальная система БЛА
Ключевым моментом в упомянутой цепочке является «измерение состояния системы».То есть координат местоположения, скорости, высоты, вертикальной скорости, углов ориентации, а также угловых скоростей и ускорений. В бортовом комплексе навигации и управления, разработанном и производимым ООО «ТеКнол», функцию измерения состояния системы выполняет малогабаритная инерциальная интегрированная система (МИНС). Имея в своем составе триады инерциальных датчиков микромеханических гироскопов и акселерометоров), а также барометрический высотомер и трехосный магнитометр, и комплексируя данные этих датчиков с данными приемника GPS, система вырабатывает полное навигационное решение по координатам и углам ориентации. МИНС разработки ТеКнола – это полная Инерциальная система, в которой реализован алгоритм бесплатформенной ИНС, интегрированной с приемником системы спутниковой навигации. Именно в этой системе содержится «секрет» работы всего комплекса управления БЛА. По сути, одновременно работают три навигационных системы в одном вычислителе по одним и тем же данным. Мы их называем «платформами». Каждая из платформ реализует свои принципы управления, имея свои «правильные» частоты (низкие или высокие). Мастер-фильтр выбирает оптимальное решение с любой из трех платформ в зависимости от характера движения. Этим обеспечивается устойчивость системы не только в прямолинейном движении, но и при виражах, некоординированных разворотах, боковом порывистом ветре. Система никогда не теряет горизонт, чем обеспечиваются правильные реакции автопилота на внешние возмущения и адекватное распределение воздействий между органами управления БЛА.
§
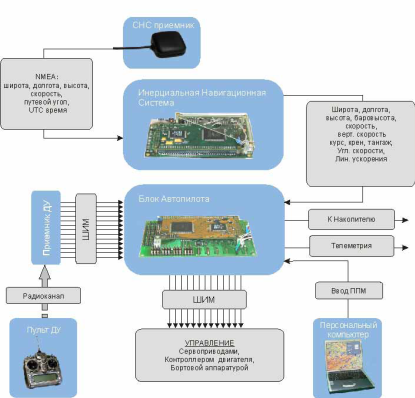
В состав Бортового Комплекса Навигации и Управления БЛА входят три составных элемента (Рисунок 1).
1. Интегрированная Навигационная Система;
2. Приемник Спутниковой Навигационной системы
3. Модуль автопилота.__
Модуль автопилота осуществляет выработку управляющих команд в виде ШИМ (широтно-импульсно-модулированных) сигналов, сообразно законам управления, заложенным в его вычислитель. Помимо управления БЛА, автопилот программируется на управление бортовой аппаратурой:
• стабилизация видеокамеры,
• синхронизированное по времени и координатам срабатывание затвора
фотоаппарата,
• выпуск парашюта,
• сброс груза или отбор проб в заданной точке
и другие функции. В память автопилота может быть занесено до 255 поворотных пунктов маршрута. Каждая точка характеризуется координатами, высотой прохождения и скоростью полета.
В полете автопилот также обеспечивает выдачу в канал передачи телеметрической информации для слежения за полетом БЛА (Рисунок 2).
А что же тогда представляет собой «квазиавтопилот»? Многие фирмы сейчас декларируют, что обеспечивают своим системам автоматический полет с помощью «самого маленького в мире автопилота».
Наиболее показательный пример такого решения — продукция канадской фирмы “Micropilot”. Для формирования сигналов управления здесь используют «сырые» данные – сигналы от гироскопов и акселерометров. Такое решение по определению не является робастным (устойчивым к внешним воздействиям и чувствительным к условиям полета) и в той или иной степени работоспособно только при полете в стабильной атмосфере.


Любое существенное внешнее возмущение (порыв ветра, восходящий поток или воздушная яма) чревато потерей ориентации летательного аппарата и аварией. Поэтому все, кто когда-либо сталкивался с подобной продукцией, рано или поздно понимали ограниченность таких автопилотов, которые никак не могут быть использованы в коммерческих серийных системах БЛА.
Более ответственные разработчики понимая, что необходимо настоящее навигационное решение, пытаются реализовать навигационный алгоритм с применением известных подходов Калмановской фильтрации.
К сожалению, и здесь не все так просто. Калмановская фильтрация — это всего лишь вспомогательный математический аппарат, а не решение задачи. Поэтому невозможно создать робастную устойчивую систему, просто перенося на MEMS интегрированные системы стандартный математический аппарат. Требуется тонкая и точная настройка на конкретное приложение. В данном случае – для маневренного объекта крылатой схемы. В нашей системе реализован более чем 15-ти летний опыт разработки инерциальных систем и алгоритмов комплексирования ИНС и GPS. К слову сказать, в мире только несколько стран обладают ноу-хау инерциальных систем. Это
Россия, США, Германия, Франция и Великобритания. За этим ноу-хау стоят научные, конструкторские и технологические школы, и по меньшей мере
наивно думать, что такую систему можно разработать и изготовить «на коленке» в институтской лаборатории или в ангаре аэродрома. Дилетантский подход здесь, как и во всех прочих случаях, чреват в конечном счете финансовыми потерями и потерей времени. Почему столь важен автоматический полет применительно к задачам, решаемым предприятиями топливно-энергетического комплекса? Понятно, что сам воздушный мониторинг не имеет альтернативы. Контроль за состоянием трубопроводов и других объектов, задачи охраны, мониторинга и видеонаблюдения лучше всего решаются с применением летательных аппаратов. А вот снижение издержек, обеспечение регулярности полетов, автоматизация сбора и обработки информации — здесь, совершенно справедливо уделяется внимание беспилотной технике, что и доказывает высокий интерес специалистов к проходящей выставке и форуму. Однако, как мы видели на выставке, беспилотные системы также могут представлять собой сложные и дорогие комплексы, требующие поддержки, обслуживания, создания наземной инфраструктуры и служб эксплуатации. В наибольшей степени это относится к комплексам, изначально созданным для решения военных задач, а теперь спешно адаптируемым к хозяйственным применениям. Отдельно остановимся на вопросах эксплуатации. Управление БЛА — задача для хорошо подготовленного профессионала. В армии США операторами БЛА становятся действующие пилоты ВВС после годовой подготовки и тренинга. Во многих аспектах это сложнее, чем пилотирование самолета, и, как известно, большинство аварий беспилотных ЛА вызваны ошибками пилота-оператора. Автоматические системы БЛА, оснащенные полноценной системой автоматического управления требуют минимальной подготовки наземного персонала, при этом решают задачи на большом удалении от места базирования, вне контакта с наземной станцией, в любых погодных условиях. Они просты в эксплуатации, мобильны, быстро развертываются и не требуют наземной инфраструктуры. Можно утверждать, что высокие характеристики систем БЛА, оснащенных полноценной САУ, снижают эксплуатационные издержки и требования к персоналу.

Системы автоматических БЛА
Каковы же практические результаты применения бортового комплекса с настоящей инерциальной системой? Компания «ТеКнол» разработала и предлагает заказчикам системы автоматических БЛА быстрого развертывания для решения задач мониторинга и воздушного наблюдения. Эти системы представлены на нашем стенде на выставке.
Автопилот в составе бортового комплекса навигации и управления обеспечивает
• Автоматический полет по заданному маршруту;
• Автоматический взлет и заход на посадку;
• Поддержание заданной высоты и скорости полета;
• Стабилизацию углов ориентации;
• Программное управление бортовыми системами.
Оперативный БЛА.
Система многоцелевого БЛА разрабатывается компанией «Транзас» и оснащается комплексом навигации и управления «ТеКнола».
Поскольку управление БЛА малого размера представляет наиболее трудную задачу, приведем примеры работы бортового комплекса навигации и управления для оперативного мини-БЛА взлетным весом 3,5 кг.
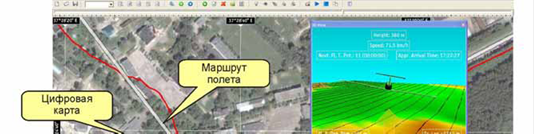
При проведении аэросъемки местности БЛА совершает полет по линиям с интервалом 50-70 метров. Автопилот обеспечивает следование по маршруту с отклонением, не превышающим 10-15 метров при скорости ветра 7 м/с (Рисунок 5).
Понятно, что самый опытный пилот-оператор не в состоянии обеспечить такую точность управления.

Рис. 5: Маршрут и траектория полета мини БЛА при съемке местности
Поддержание заданной высоты полета также обеспечивается МИНС, которая вырабатывает комплексное решение по данным GPS, барометрического высотомера и инерциальных датчиков. При автоматическом полете по маршруту бортовой комплекс обеспечивает точность поддержания высоты в пределах 5 метров (Рисунок 6), что позволяет уверенно летать на малых высотах и с огибанием рельефа.

Рис. 6
Рисунок 7 показывает, как САУ выводит БЛА из критического крена в 65º, в результате воздействия порыва бокового ветра при совершении маневра. Только настоящая ИНС в составе бортового комплекса управления в состоянии обеспечить динамичное измерение углов ориентации БЛА, не «потерять горизонт». Поэтому в процессе испытаний и эксплуатации наших БЛА ни один самолет не был потерян при полете под управлением автопилота.
Еще одной важной функцией БЛА является управление видеокамерой. В полете стабилизация камеры переднего обзора обеспечивается отработкой колебаний БЛА по крену по сигналам автопилота и данным МИНС. Таким образом картинка видео изображения оказывается стабильной, несмотря на колебания ЛА по крену. В задачах аэрофотосъемки (например, при составлении аэрофотоплана предполагаемого района проведения работ) точная информация об углах ориентации, координатах и высоте БЛА совершенно необходима для коррекции аэрофотоснимков, автоматизации сшивки кадров.
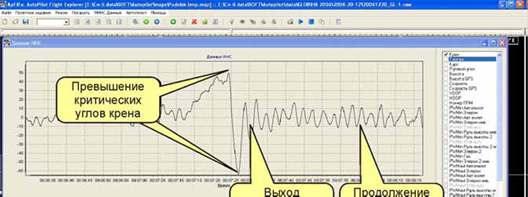

Рис. 7
Беспилотный комплекс аэрофотосъемки также разрабатывается ООО «ТеКнол». Для этого производится доработка цифрового фотоаппарата и его включение в контур управления автопилотом. Первые полеты намечено провести весной 2007 года. Помимо упомянутых систем БЛА быстрого развертывания Бортовой Комплекс Навигации и Управления БЛА эксплуатируется СКБ «Топаз» (БЛА «Ворон»), устанавливается на новом БЛА разработанном компанией «Транзас» (многоцелевой комплекс БЛА «Дозор»), проходит испытания на мини БЛА компании Global Teknik (Турция). Ведутся переговоры с другими российскими и зарубежными клиентами. Изложенная выше информация и, главное, результаты летных испытаний, со всей очевидностью свидетельствуют, что без полноценного бортового комплекса управления, оснащенного настоящей инерциальной системой, невозможно построение современных коммерческих систем БЛА, которые могут решать задачи безопасно, оперативно, в любых погодных условиях, с минимальными издержками со стороны эксплуатирующих служб. Такие комплексы серийно выпускаются компанией «ТеКнол».
Выводы
Рассмотренный состав бортового оборудования БЛА позволяет обеспечить решение широкого круга задач по мониторингу местности и труднодоступных для человека районов в интересах народного хозяйства. Применение в состав бортового оборудования телевизионных камер позволяет в условиях хорошей метеовидимости и освещенности обеспечить высокое разрешение и детальный мониторинг подстилающей поверхности в режиме реального времени. Применение ЦФА позволяет использовать БЛА для проведения аэрофотосъемки в заданном районе с последующей детальной дешифровкой. Использование ТПВ аппаратуры позволяет обеспечить круглосуточность применения БЛА, хотя и с меньшим разрешением, чем при использовании телевизионных камер. Наиболее целесообразно применение комплексных систем, например ТВ-ТПВ, с формированием синтезированного изображения. Однако такие системы пока еще достаточно дороги. Наличие на борту РЛС позволяет получать информацию с меньшим разрешением, чем ТВ и ТПВ, но круглосуточно и при неблагоприятных метеоусловиях. Применение сменных модулей устройств получения видовой информации, позволяет снизить стоимость и реконфигурировать состав бортового оборудования для решения поставленной задачи в конкретных условиях применения. Возможность обеспечения устойчивой связи является одной из важнейших характеристик, определяющих эксплуатационные возможности комплекса управления БЛА. Предложенная система управления пространственным положением остронаправленной АС в комплексах управления БЛА обеспечивает оптимизацию процесса вхождения в связь и возможность восстановления связи в случае ее потери. Система применима для использования на БЛА, а также на пунктах управления наземного и воздушного базирования.
Используемая литература
1. http://www.airwar.ru/bpla.html
2. http://ru.wikipedia.org/wiki/UAV
3. http://www.ispl.ru/Sistemy_upravleniya-BLA.html
4. http://teknol.ru/products/aviation/uav/
5. Орлов Б.В., Мазинг Г.Ю., Рейдель А.Л., Степанов М.Н., Топчеев Ю.И. – Основы проектирования ракетно-прямоточных двигателей для беспилотных летательных аппаратов.
Три кейса для силовых структур
В России разработано новое устройство для борьбы с дронами
НИИ «Вектор» разработал для силовиков новое средство борьбы с беспилотниками. Комплекс стоимостью от 25 млн руб. умещается в трех кейсах. Рынок таких устройств отличается высокой конкурентностью, отмечают эксперты
На что способен новый комплекс
Санкт-петербургский научно-исследовательский институт «Вектор» (входит в концерн «Вега» холдинга «Росэлектроника» госкорпорации «Ростех») разработал мобильный комплекс борьбы с беспилотниками, получивший название «Защита». Об этом РБК сообщили в пресс-службе «Ростеха».
Комплекс умещается в трех кейсах и способен подавлять управление дроном в радиусе 2 км вне зависимости от времени суток и погодных условий, оставаясь незаметным и неуязвимым для радиопротиводействия. На развертывание системы требуется около 30 минут.
Генеральный директор концерна «Вега» Вячеслав Михеев заявил РБК, что испытания комплекса уже завершены и предприятие готово к серийному производству. По словам Михеева, ежегодно НИИ «Вектор» готов производить до 50 комплексов «Защита».
Стоимость изделия будет соответствовать рынку, заверили РБК в пресс-службе холдинга «Росэлектроника». «По оценкам экспертов, на сегодняшний день стоимость комплексных решений для противодействия БПЛА составляет 25–35 млн руб. в зависимости от комплектации», — добавили в холдинге.
Как работает «Защита»
Комплекс «Защита» способен «видеть» летательные аппараты в секторе 360 градусов по азимуту и на расстоянии до 2 км и определять, какого они типа — самолетного, вертолетного или конвертопланного, сообщили в пресс-службе «Ростеха». Устройство способно обнаружить местонахождение пульта управления дрона и разорвать канал связи с летательным аппаратом. Для этого обеспечивается сплошное перекрытие по частоте в диапазоне от 400 до 6200 МГц, используемой для управления беспилотниками. Одновременно с подавлением каналов управления БПЛА действует система подавления навигационных сигналов глобальных спутниковых систем.
В «Защите» использован пассивный когерентный локатор, т.е. комплекс не облучает цель, а использует сигналы, излучаемые внешними сторонними передатчиками, — волны цифрового телевещания, отраженные от цели. Отсутствие активного локатора позволяет комплексу оставаться незаметным для чужих перехватывающих устройств, что существенно снижает вероятность радиопротиводействия. Кроме того, пассивная РЛС не требует разрешения на использование радиочастотных каналов, что облегчает ее применение в гражданской сфере.
Кому и зачем нужна «Защита»
Растущая доступность БПЛА повышает риск их неконтролируемого и незаконного использования, в том числе на критически важных объектах, объяснил РБК генеральный директор холдинга «Росэлектроника» Сергей Сахненко. При этом применение средств защиты зачастую ограниченно, добавил он. «Например, использование комплексов с активными РЛС невозможно в местах массового скопления людей, а сами комплексы заметны и уязвимы для радиопротиводействия», — сказал Сахненко.
Сегодня как на отечественном, так и на зарубежном рынках представлены десятки видов средств подавления беспилотников. Некоторые из них разработаны предприятиями «Росэлектроники». В прошлом году холдинг успешно провел испытания комплекса с похожими характеристиками — модернизированной «Атаки-DBS». Его разработчик — НПП «Алмаз». Максимальная дальность обнаружения БПЛА составила 2,9 км, подавления — 2,5 км. Система может использоваться как в виде автономной ячейки подавления, так и в виде комплекса взаимосвязанных ячеек, закрывающих заданный периметр. Входящая в концерн «Калашников» группа компаний ZALA AERO разработала линейку против «лоукост-терроризма»: Rex 1 и Rex 2. На проходившем в 2023 году в России чемпионате мира по футболу использовались устройства подавления дронов «Владимирского КБ радиосвязи» и петербургской компании «Специальный технологический центр».
Вячеслав Михеев сообщил РБК, что у «Защиты» уже есть несколько потенциальных заказчиков, «в том числе среди силовых ведомств». Однако называть конкретных интересантов Михеев не стал.
Сегмент средств борьбы с беспилотниками отличается высокой конкуренцией, отметил эксперт в области беспилотных систем, руководитель Центра новых технологий Денис Федутинов. Это, конечно, затрудняет разработчикам продвижение новых систем, если только вопрос с их приобретением не решается в особом порядке, добавил он.
«Вместе с тем системы такого рода необходимы для широкого круга заинтересованных эксплуатантов. С их помощью может обеспечиваться прикрытие небольших объектов. Например, объектов связи и управления, электростанций, нефтеперерабатывающих и химических заводов, аэропортов и мостов», — пояснил эксперт. Актуальность наличия средств противодействия БПЛА была наглядно показана в ходе успешных атак йеменских повстанцев на саудовские НПЗ в 2023 году, напомнил Федутинов. «Кроме того, такие комплексы могут применяться для защиты гражданского населения, например в ходе массовых мероприятий», — заключил эксперт.
«Защита» абсолютно точно не заинтересует вооруженные силы, считает главный редактор журнала «Арсенал Отечества», полковник запаса Виктор Мураховский. «Радиус 2 км для военных — это невероятно мало. Что касается наличия у изделия пассивного радиолокатора, то оборотная сторона его применения заключается в том, что требуются посторонние источники радиоизлучений в районе цели. Если таких источников нет, то и пассивная радиолокация не работает. То есть в городской застройке система функционировать будет, а в чистом поле, где воюет армия, нет», — объяснил эксперт.
Мураховский предположил, что «Защита» может заинтересовать ФСИН. Дроны неоднократно использовались для доставки запрещенных товаров на территорию исправительных учреждений, напомнил эксперт. «Сотовый телефон, наркотики, деньги и другие легковесные товары без вопросов доставляет обычный китайский коптер. В качестве борьбы с ними, возможно, и пригодилась бы новая разработка НИИ «Вектор», — заключил Мураховский.
Что такое «Росэлектроника»
Холдинг «Росэлектроника» образован в 1997 году, в 2009 году вошел в «Ростех». В состав холдинга входят крупнейшие концерны радиоэлектронной промышленности страны — «Созвездие», «Вега», «Автоматика» и «Системы управления». Всего «Росэлектроника» объединяет более 140 предприятий, специализирующихся на разработке и производстве радиоэлектронных компонентов и технологий, средств и систем связи, автоматизированных систем управления, робототехнических комплексов и СВЧ-электроники. Общая численность сотрудников — более 70 тыс. человек. Холдинг формирует более 50% выпуска электронных компонентов в России.
Энтомоптеры.
БПЛА, имитирующие движения летающих насекомых, условно можно подразделить на имитаторы четырехкрылых и имитаторы двукрылых насекомых. Четырехкрылые (стрекозы, бабочки) совершают более сложные движения, чем двукрылые, и возможностей управления полетом у них гораздо больше. На рис. 1.57 показан пример четырехкрылого энтомоптера, разработанного компанией Festo.
Длина корпуса аппарата составляет 44 см, размах крыльев 63 см. Крылья выполнены из углеродного волокна и полиэфирной плёнки. Показатель частоты взмахов крылом относительно невысокий – 15-20 Гц. Масса аппарата составляет всего 175 г.
Управление полётом робота осуществляется со смартфона. BionicOpter имеет встроенный ARM-микроконтроллер, обеспечивающий стабилизацию полёта. Аппарат оснащен одним основным электродвигателем и восемью сервоприводами. На борту имеется набор сенсоров для предотвращения столкновений с препятствиями. Схема питается от двухсекционного литийполимерного аккумулятора 7,4 В.
Конструкция BionicOpter обеспечивает этому аппарату множество возможностей маневрирования. Каждое крыло, кроме маховых движений, может совершать вращательные движения вокруг своей оси и угловые перемещения в горизонтальной плоскости. Кроме того, хвостовая часть может изгибаться, меняя положение центра тяжести.
Разработки БПЛА, имитирующие двукрылых насекомых, развиваются, в основном, в направлении микроминиатюризации аппаратов. Здесь все достижения, видимо, еще впереди. Развитие технологий новых сверхлегких материалов, источников питания, наноэлектроники и интеллектуального управления в ближайшие годы позволят создать микроминиатюрные насекомоподобные БПЛА, приближающиеся к живым существам и по выполняемым функциям, и по размеру.
Появятся (уже появляются) новые концепции управления коллективами микророботов, перед которыми можно будет ставить цели, ранее не достижимые, т.к. эти формации воздушных микророботов будут обладать большими возможностями в силу таких их качеств, как коллективная живучесть, способность многовариантного решения задач, незаметность перемещений, способность к массированным и непрерывным миссиям и т.д.
Пример разработки миниатюрного двукрылого энтомоптера показан на рис. 1.58. Это микро-БПЛА Mobee (Monolithic Bee), разработанный Лабораторией микроробототехники Гарвардского университета (США). Его особенность в том, что он изготовлен по интегральной многослойной технологии.
В основе – тонкая углепластиковая пластина, в которой лазером сделаны все необходимые вырезы, затем нанесено еще множество металлических и неметаллических слоев, формирующих необходимые электронные и микроэлектромеханические устройства, включая сенсоры, радиотехнические устройства и актуаторы крыльев [44].