

- Вот несколько обязательных для исполнения указаний по зарядке lipo батарей (литий-полимерные батареи).
- Какой lipo аккумулятор следует покупать?
- Калибровка “всех сразу” регуляторов esc
- Квадрокоптер своими руками
- Комплектующие рамы
- Напряжение и количество ячеек
- Особенности включают в себя:
- Подключите радиоприемник: pwm или ppm сигналы
- Подробности сообщений (конкретно для apm arducopter)
- Полетный контроллер apm 2.6,обзор и полная видеоинструкция.
- Понимание конвенций
- Просмотр содержимого
- Советы которые смогут помочь защитить ваш аппарат от повреждений
Вот несколько обязательных для исполнения указаний по зарядке lipo батарей (литий-полимерные батареи).
- Используйте зарядное устройство, которое одобрено для литиевых батарей. Зарядное устройство может быть предназначено для Li-Ion или Li-Poly.
Все батареи заряжаются одинаково. Некоторые старые зарядные устройства от сотовых телефонов могут заряжать аккумуляторы
до 0,1 вольт от необходимого напряжения (4.1 против 4.2), но это не приведет к повреждению батареи.
Тем не менее, недорогие зарядные устройства широко доступны и использование зарядных от мобильных телефонов настоятельно не рекомендуется. - Убедитесь в том, что правильно устанавливается количество ячеек батарейки на вашем зарядном устройстве.
Смотрите на зарядное устройство очень внимательно в течение нескольких минут для того,
чтобы количество правильных ячеек отображалось правлильно.
Если вы не знаете, как это сделать, приобретите интелектуальное зарядное устройство или не заряжайте lipo аккамулятор. - Используйте балансировачный разъем.
Перед зарядкой новой литиевой батареи, проверьте напряжение каждой ячейки по отдельности.
Делайте это после каждого десятого цикла.
Это абсолютно необходимо, потому, что несбалансированная ячейка может взорваться во время зарядки,
даже если выбирается правильное количество ячеек на зарядке.
Если напряжение на ячейках не в пределах 0,1 вольт друг от друга, то зарядите каждую ячейку до 4,2 вольт (используя балансированную зарядку зарядного устройства через балансировачный кабель батарейки).
Если после каждого разряда батарейки у вас появляется несбалансированная ячейка – аккамулятор должен быть заменён. - Балансировачный кабель есь на большинстве lipo батареек.
Они позволяют проверить напряжение на каждой ячейки.
Не пытайтесь использовать вольтметр, штыри могут создать короткое замыкание случайно соскользнув.
Используя балансировочный кабель и зарядное устройство поддерживающую балансировочную зарядку можно заряжать все ячейки одновременно. - НИКОГДА не заряжайте аккумулятор без присмотра. Это причина номер один для дома и авто , которые сжигаются дотла от литиевых пожаров.
- Используйте безопасную поверхность для зарядки батареи так, что если она взорвется то пламя не повредит ничего. Можно использовать специальные пожароустойчивые пакеты , в которые помещается батарейка для зарядки, а так можно использовать любой другой хороший вариант.
- НЕ заряжайте током заряда более чем в 1С, если это специально не указано на упаковке производителя.
Лично у меня был пожар в доме из-за нарушения этого правила.
Сегодня есть высокозарядные батареи , котоые можно заряжать больше, чем 1С, однако это сокращает срок службы.
Лучше покупать 3 батарейки, чем пытаться использовать одну, которая заряжается в три раза быстрее.
Но ситуация может измениться в будущем , сейчас появляются новые батареи с улучшением характеристик. Обращайте внимание на характиристики при покупке, если они явно не указаны – используется явно старая технология производства батарей (китайские магазины у которых много дешевых батарей это как раз не указывают) - Ни в коем случае не прокалывайте ячейку у батарейки, никогда!!!! Если это произошло будьте готовы к воспламенению,
соблюдайте повышеные меры пожаробезопасности. Если ячейка начнет вздуваться то возможно воспламенение и возгорание.
Если этого не произошло то вам необходимо разрядить эту батарею для будующей утилизации подключив к ней например лампочку определенного напряжения. - При аварии вашего летательного аппарата батарея может быть повреждена внутри.
С виду это может выглядеть безопасно, но при каждой авариитщательно извлеките аккумулятор из аппарата и осмотрите его внимательно,
по крайней мере в ближайшие 20 мин. Несколько пожаров были вызваны от поврежденных ячеек аккамулятора будучи оставленными в автомобиле - Заряжайте батарею в открытом и проветриваемом помещении.
Если батарея делает повредиться или произойдёт взрыв – опасные газы и ядовитые материалы будут выходить из неё. - Держите ведро песка поблизости, когда вы летаете или заряжаете аккумулятор.
Это экономически эффективный способ тушения пожаров.
Это очень дешево и абсолютно необходимо.
Литиевые батареи любят тепло, но не слишком много.
В зимнее время, старайтесь держать ваши батареи от холода как можно дольше.
Оставьте их в машине, пока вы летаете или держите их в своих штанах … и т.д.
В то же время не позволяйте им нагреваться слишком сильно.
Старайтесь, чтобы ваши батареи не достигали 160F после использования.
Это продлит жизнь ячеек у батарейки.
Хороший способ для измерения температуры представляет собой портативный инфракрасный измеритель температуры,
он может быть куплен в районе 50 долларов в большинстве хобби магазинах.
Какой lipo аккумулятор следует покупать?
Сейчас очень много вариантов и из-за этого сложно расшифровать , что бренд, а что ложь.
Производители батарей постоянно пытаются друг до друга в чем-то упрекнуть и что-то взять.
В то время как капитализм может снизить цены, он также может служить поводом для ложных утверждений о продуктах.
Один отличный способ узнать, что данная батарея лучше – это посмотреть на графики производительности батареи.
Глядя на то, как напряжение ячейки падает при различных нагрузках даст вам хорошу метрику для сравнения с аналогичными размером / весом другой батареи.
Если вы не можете разобраться в груфиках, то посмотрите на то, что используют другие люди в успешных инсталяциях, которые похожи на ваши.
Если много людей сообщают о длительном времени полета и большого запаса энергии то вы можете сделать тоже самое – выбрать эту батарею
Платить что бы узнать сколько ватт, вольт и ампер? Понимание этих концепций выходит за рамки этой статьи, но может служить вам,
что бы понять , что аккумулятор лучше.
Для квадрокоптеров и других летательных аппаратов следует расчитать максимальный ток потребления, если у вас установлено четыре регулятора ESC на 30А
и моторы потребляют 30А максимально, то максимальный ток потребления будет 30*4 = 120А . Если у Вас имеется батарея на 5000мА то её параметр С должен быть
не меньше 120/5А = 30С .
Выбрав батарейку с диапазоном разряда 20-60С вы рискуете на последних минутах разряда её потерять необходимую мощность , которая будет уже 20С.
Обращайте на это внимание при расчете потребления тока. Полетный контроллер и другое оборудование потребляют не так много.
Последнее замечание о выборе аккумулятора.
Аккуратнее с дешевыми аккумуляторвми.
Убедитесь, что ваши батареи способны работать и что уровень силы тока тот, который вы планируете использовать.
Не перегружайте нагрузкой батарею – это может не только привести к её выходу, но и повлиять на полета (просаживание мощности).
Лучше купите хорошую батарею, чем нужно, чем разбить свой аппарат.
Калибровка “всех сразу” регуляторов esc
Проверьте безопасность работ!
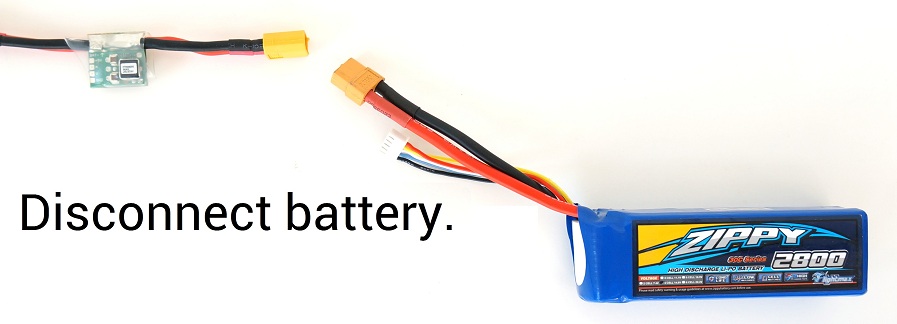
Перед калибровкой регуляторов ESC, пожалуйста, убедитесь, что ваш квадрокоптер не имеет пропеллеров, и что APM не подключен к компьютеру через USB и батарея Lipo отключена.

Включите аппаратуру и установите стик газа на макмимум.

Подключите аккумулятор Lipo. На полетном конроллере АРМ начнут циклически загоратся красный, синий и желтый светодиоды.
Это означает, что APM готов перейти в режим калибровки ESC в следующий раз, когда вы его включите снова.
Оставьте стик газа на максимуме и переподключите батарею (выключите и снова включите).
Для PX4 или Pixhawk, нажмите и удерживайте кнопку безопасности, пока не появится гореть красным.
Автопилот войдет в режим калибровки ESC. (На нём вы заметите , как синий и красный светодиоды начнут мигать последовательно, как на полицейских автомобилях).
Подождите пока не появятся музыкальный сигнал , который будут излучать ваши регуляторы регулярное количество раз “бипов”,
показывающее количество ячеек вашей батареи (т.е. 3 для 3S, 4 для 4S),
а затем еще два звуковых сигнала, чтобы указать, что максимальная дроссельной был захвачен.
Уберите стик газа до минимального положения.

Регуляоры должны издать длинный гудок, который указывает, что минимальное положение стика газа было установленно и калибровка закончится.
Если вы слышали длинный сигнал, который указывает успешную калибровку, это значит, что регуляторы сейчас “живы” и если немного подать газу моторы начнут вращаться.
Проверьте, что моторы вращаются, поднимайте газ немного и убирайте его.
Установите стик газа на минимум и отключите LiPo батарею, для выхода из режима калибровки ESC.
Квадрокоптер своими руками
Существует много решений , как собрать свой квадрокоптер, но как показывает практика большинство людей
сталкивается с теми или иными проблемами при постройке квадрокоптера. Не имея представления как им управлять
и пытаться собрать хоббийный квадрокоптер, а это, как правило рама 450 класса – это очень затратно по деньгам.
Даже у меня первый самосборный квадрокоптер, без опыта полетов и опыта сборки
побывал в воздухе 5 секунд и разбился. Все из-за того, что мне не были понятны нюансы при сборке и настройке полетного
контроллера. Сборка квадрокоптера подразумевает , что у вас как минимум:
- Есть опыт в пилотировании хотя бы маленького квадрокоптера, например Hubsan X4 H107L
- Есть понимание принципов работы всех его узлов
- Вы ознакомлены с техникой безопасности (а это означает понимание,
что даже маленький квадрокоптер хорошо может поцарапать,
даже в руках детей это очень опасная игрушка). Не зря на коробке даже
маленького квадрокоптера написано, что для детей от 14 лет. Редко когда бывает исключение.
Поэтому исходя из вышеизложенного рекомендую не пожалеть и потратить деньги на маленьких 4-х канальный квадрокоптер
и научиться на нем как минимум: висеть в воздухе, летать по кругу, летать по “восьмерке”,
пролетать в разного рода щели, летать на улице в ветер и конечно же – летать лицом к себе.
После того как спустя месяц или два практики вы не забросите полеты – можно возращаться
на этот сайт и мы приступим к сборке уже настоящего хоббийного автономного квадрокоптера.
Переходя из класса в класс вы получаете опыт в пилотировании.
А когда время дойдет до квадрокоптера своими руками :
- Задумайтесь – лучше точный расчет деталей и комплектующих, чем непонятно что.
- Начните получать опыт в пилотировании с простого и маленького простого квадрокоптера готового к полету (RTF версия).
- Для тех кто с “руками” можно построить на основе рамы F450, хороший квадрокоптер, который мы опишем ниже.
- Первый квадрокоптер не должен быть для фото / видео или FPV – вы должны просто построить квадрокоптер и в первую очередь научиться летать.
- Даже если вы знаете , что вам действительно нужно вы должны понимать , что вам необходимо привыкнуть к управлению вашего квадрокоптера и его полетного контроллера.
- Если вы хотите получить массу удовольствий от управления начните с недорогого , безопасного , прочного и готового к полетам маленького квадрокоптера , такого как Hubsan X4 H107L.
- Если вы серьезно подошли к делу , то попробуйте ARF версию рамы для постройки или если вы хотите просто лететь и может себе это позволить – используйте RTF версию (готовый к полетам квадрокоптер).
- Не начинайте со сборки рамы, даже если у вас есть полная инструкция как построить действительно хороший квадрокоптер для акробатики и спорта.
- Не начинайте строить свою собственную раму; даже среди строителей больше неудач, чем успехов; не повторяйте их ошибки.
- Не начинайте с большого и опасного квадрокоптера с кучей фото или видео аппаратурой на нём – это очень опасно и вы будите сожалеть об этом.
- Небольшой и маневренный квадрокоптер всегда приносит больше удовольствия, чем большой, медленный и громоздкий гексакоптер или октакоптер (hexacopter octacopter).
- Для хорошей профессиональной сьемки или фотографии всегда требуются большие камеры, вам лучше думать о маленьком, легком и маневренным квадрокоптере.
- Безопасность полетов очень важна, держите безопасное растояние подальше от людей и дорогих вещей, не забудьте посетить страницу по безопасности.
Комплектующие рамы
- Как только вы соберетесь к постройке своими руками квадрокоптера вы получите хороший опыт в строительстве, но это уже не для новичков.
- Исключением являеся, если вы внимательно следуете инструкциям по сборке квадрокоптера.
- Об использованных методах постройки рам можно узнать из каждого “журнала постройки”.
- Есть достаточно интересные модели рам, которые не разрушаются, например спортивно-акрабатические рамы Hoverthings flip 380 sport frame.
- Эта рама использует жесткую и сильные карбоновые лучи которые обрабатываются на ЧПУ станке из толстоко стекловолокна.
- Это позволяет использовать те же моторы и регуляторы ESC, что и в раме F450 DJI c пропеллерами до 10 дюймов.
- Я купил Флип Sport Kit плюс дополнительная пара “вкладка” секций типа центр и дополнительных 7/8 “прокладками”.
- Рама позволяет размещать батарейку под основной платой специальными держателями.
- Так же использовать специальный регулятор 4-в-1 помещенному между центральными пластинами рамы.
- Совмещенный регулятор ESC 4 в 1 ESC производит меньше помех и компактен, чем 4 обычных регулятора ESC и плата распределения питания.
- Я использую карбоновые 10 дюймовые пропеллеры, потому что они очень жесткие и очень эффективные.
- Моя цель заключается в создании еще более жесткого и более высокопроизводительного квадрокоптера, чем DJI F450.
- Хотя это небольшой квадрокоптер является мощным и достаточно гибким, чтобы использовать FPV видео и / или камеру GoPro с “подвесом”.

- Рама Tarot 650 из карбона довольно большая и позволяет устанавливать пропеллеры до 17 дюймов.
- Я использую моторы 360kv медленной скорости и большого диаметра, которые предназначены для использования более эффективных и больших пропеллеров на низких скоростях.
- Я буду использовать разнообразные пропеллеры – от 14 до 17 дюймов, чтобы исследовать производительность и эффективность при различных размерах пропеллеров.
- Хотя акрабатический спортивный квадрокоптер 330, который показан выше может быть целесообразным для первого квадрокоптера этот Tarot 650, безусловно, нет.
- Это четырехмоторный аппарат достаточно велик, чтобы быть тяговитым и долгим в полете на выносливость и нести большую видео или фотокамеру, но:
- Для подъема полезной нагрузки в 2кг с квадрокоптером вам нужно уточнить конфигурацию моторов и пропеллеров.
- Четыре мотора Tigermotor MN4010 475KV стоимостью около $ 86 каждый, четыре 15 х 5 или 16 х 5 пропеллера и четыре высококачественных регулятора ESC 30А.
- Так же нужно 10000 мАч 4-х баночную Lipo батарейку (две 5000мАч) для достижения примерно 10 минут полетного времени на 4KG общего веса.
- Квадрокоптер способный поднять общую массу 4кг (включая 2кг полезной нагрузки) и уметь взлетать при 50% тяги (это необходимость по технике, а так же иметь возможность 6кг взлета).
- Вам понадобится 16х5 пропеллеры для достижения тяги и эффективности необходимые для подъема 4KG с разумным временем полета.
- Именно поэтому требутся большие двигатели с минимальным кВ, они должны быть высокого качества, что бы выдержать непрерывную высокую нагрузку производительности.
- Это настоятельно рекомендуется, что бы вы не пытались построить один из таких апаратов в качестве первого из непонятно чего.
- Есть очень полезная ссылка для расчета производительности различных мультикоптеров и их компонентов – калькулятор квадрокоптера: eCalc

Напряжение и количество ячеек
LiPols батареи действуют по другому, чем никель-кадмиевые или никель-металлогидридные батареи, когда заряжены и разряжены.
Литиевые батареи полностью заряжены, когда каждая ячейка имеет напряжение 4,2 вольт.
Они полностью разряжены, когда каждая ячейка имеет напряжение 3.0 вольт.
Хороший способ гарантировать, что напряжение на ячейке не ниже 3.0 вольт во время полета – это установить отсчечку низкого напряжения (LVC) на
регуляторе ESC. Важно использовать программируемый регулятор ESC, так как правильное установление отсечки имеет решающее значение для жизни ваших батареек.
Используйте режим программирования ESC, что бы установить LVC на 3.0 вольт на элемент с жесткой отсчечкой (Hard Cutoff) или 3.3 вольт для мягкой отсечки (Soft Cutoff).
Если ваш регулятор ESC не имеет жесткой или мягкой отсечки используйте отсечку на 3.
Если ваш регулятор имеет автоматический режим лития.
Используйте его и он будет правильно понимать количество ячеек. Установите автоматическое Cutoff (обрезание) соответствующим образом.
Если вы уже летали с никель-кадмиевыми или никель-металлогидридными аккумуляторами,
перейдя на литий-полимерный вы будете использовать другое количество ячеек.
Если вы использовали 6-7 , то это 2 ячеечная литий-полимерная батарейка.
Если вы использовали 10-11 ячейковые, то это станет 3 ячейковой литий-полимерной батарейкой.
Есть два варианта решений летчиков , которые использовали 8 ячеек , которые застряли между 2 и 3 ячеечными литий-полимерными батарейками.
По моему опыту лучше определить сколько ватт вы использовали и дублировать эти значения на lipo , двигатель. Например:
Вы использовали 8 ячеек NiCd (9.6 вольт) на 10 ампер , на скоости 400 у самолета. У вас есть 9,6*10 = 96 Ватт
Если вы перейдете на 2 (2S) ячейкову батарейку (7.2 вольта номинал), то вы должны изменить свой пропеллер так, что бы вы могли использовать 13А.
Если вы перешли на 3 (3S) ячейковую батарейку (10.8 вольт номинал), то вы должны уменьшить силу тока до 8.9А.
Эти расчеты являются приблизительными и некоторое экспериментирование требуется для достижения лучших результатов,
но сохраняя потребленния Ватт является хорошим способом для начала.
Особенности включают в себя:
Высокоточная подержка удержания высоты позволит спокойно летать сразу.
Или выбререте удивительный режим “простой полет” (Simple mode), что делает ArduCopter одним из самых простых в управлении.
Не беспокойтесь за слежением орентации вашего квадрокоптера, пусть полетный контролер этим занимается сам!
Вам не потребуются знания в программировании. Просто используйте простую в использовании программу на
рабочем столе, что бы загрузить последнюю прошивку одним щелчком мыши и настройте с помощью
программного обеспечения Mission Planner нужные вам режимы. Используйте эту программу в
качестве мощной наземной станции (Ground Station).
Сотни GPS точек ждут вас (точное число зависит от памяти полетного контроллера,
ArduCopter подерживает 127 точек, но есть и более продвинутые системы на базе PX4).
Просто поставте точку в Mission Planner и ArduCopter полетит к ним.
RTL (Вернуться на старте). Щелкните переключаетелем , что бы вернуть ArduCopter на место старта автоматически.
Планирование всех миссий доступны через опциональную двухстороннюю связь.
Путевые точки, смена режимов полета, даже тюнинг может быть сделан с
вашего ноутбука, в то время как аппарат находиться в воздухе!
Автоматический взлет и посадка. Просто введите аппарат в этот режим
и смотрите как ArduCopter сам выполнит свою миссию полностью автономно,
вернувшись домой сядет на землю перед вами.
В связи с богатым набором функций и полностью автономных возможностей АРМ,
кривая обучения может выглядеть несколько пугающим.
К счастью набор исчерпывающей информации сделает это стремление очень простым и достижимым.
Пожалуйста, не поддавайтесь искушению пропустить шаги и бросаться к быстрому полету.
Это робототехника и авиация комбинированного типа из которых являются довольно
сложными вещи сами по себе. Следуйте инструкциям и у вас будет свой робот
в воздухе.
Подключите радиоприемник: pwm или ppm сигналы
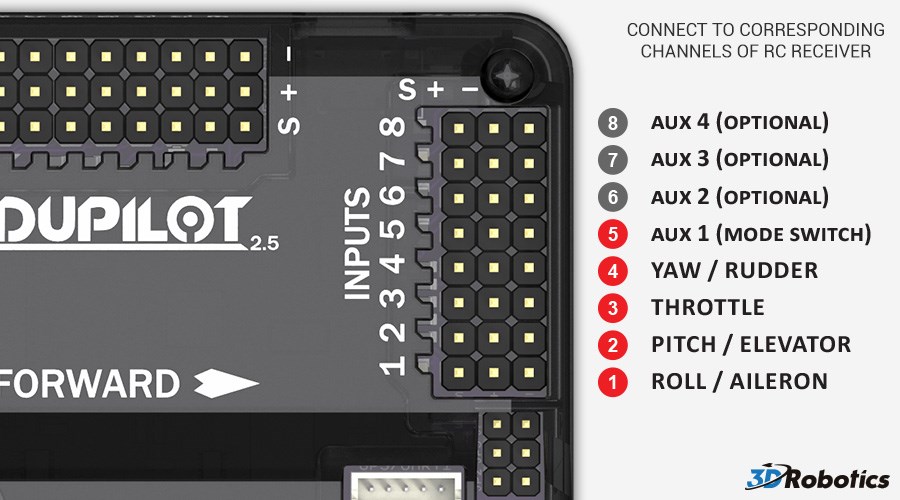
- для управления по радио через ШИМ (PWM) подключите радиоприемник к APM входных сигнальных контактов используя разъемы для подключения канала 1 к APM сигнала конекторами с надпиьсь 1 , канал 2 к конекторам 2 и т.д. Кроме того, необходимо убедиться в том, что приемник будет питаться от APM.
- для управления по радио через PPM необходимо подключить первый канал и перемкнуть перемычкой входы 2 и 3 , как показано на картинке. Выводы на приемнике могут варьироваться , поэтому обратитесь к документации на ваш приемник.
После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод.
Не подключайте провод к USB-хабу , подключайте провод к компьютеру.

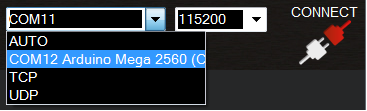
После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит
и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан
в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке
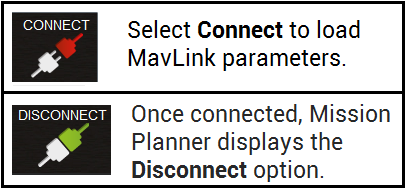
Выберите “соединение” в правом вверхнем углу экрана ,
что бы загрузить параметры MAVLINK в APM ,
Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.
Включите передатчик и убедитесь, что он в режиме самолета
(Полетному контроллеру необходим режим полета , независимо от платформы на
эксперементальной основе) и установите все стики по центру.

Левая ручка будет контролировать газ (THR) и рысканья (Yaw),
правая будет контролировать крен (Roll) и тангаж (Pitch) .
Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating” ,
нажмите на “калибровка” и правом нижнем углу,
Mission Planner выведет окно,
что батарея не должна быть подключена ,
как и моторы с пропеллерами.
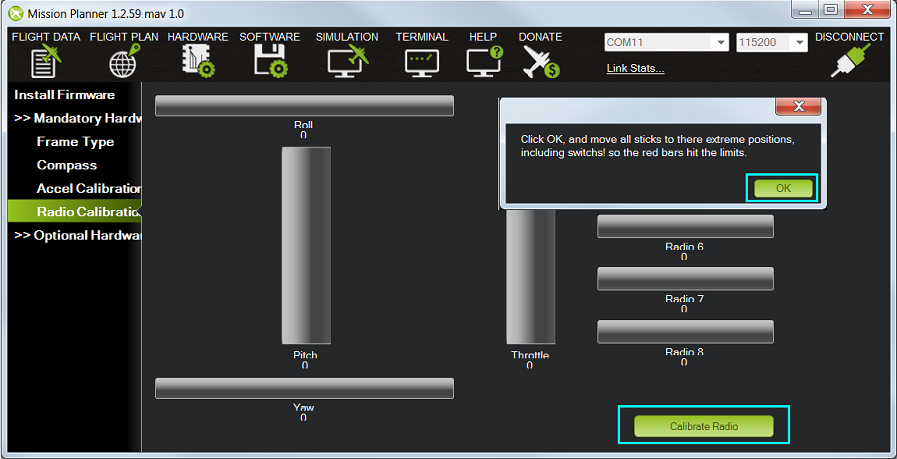
Нажмите “ок” и начните двигать стиками в каждую из сторон до предела,
а так же трехпозиционный тумблер. наблюдайте за результатами,
красные линии установят пределы минимамльного и максимального
значения вашего радиопередатчика.
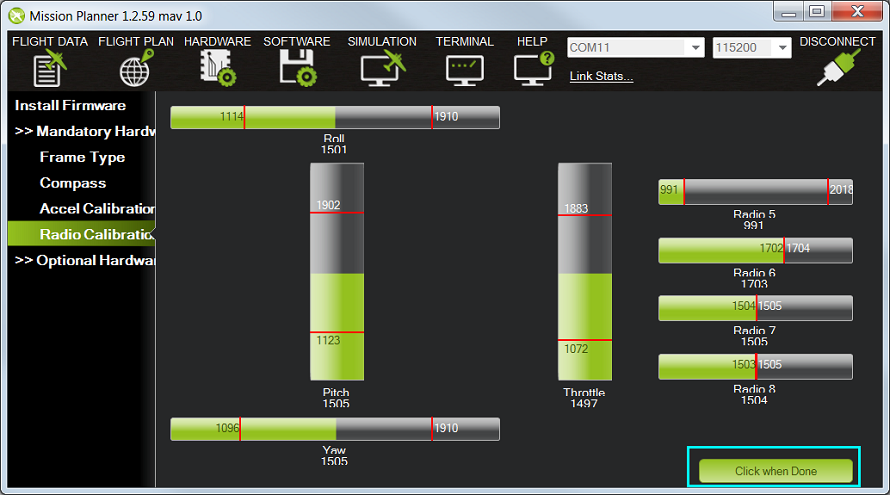
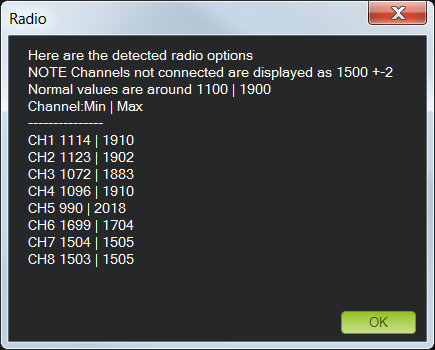
Когда все значения каналов радио смогли показать свой
минимум и максимум нажмите в программе “Done”.
Данные вам отобразятся в отдельном окне,
нормальное значение около 1100 для минимума и 1900 для максимума.
Подробности сообщений (конкретно для apm arducopter)
ATT (информация высоты)
- Rollin: Желааемый угол крена пилота в сантиметро-градусах (наклон в лево – отрицательное, вправо – положительное)
- Roll: фактический наклон квадрокоптера в сантиметро-градусах (наклон влево – отрицательное, вправо – положительное значение)
- Pitchin: желаемый угол наклона пилота в сантиметро-градусах (наклок вперёд – отрицательное, назад – положительное)
- Pitch: фактический угол тангажа квадрокоптера в сантиметро-градусах (вперед отрицательное, назад – положительное)
- YawIn: требуемая скорость рысканья пилота, число от -4500 до 4500 (не градусы/секунды, вращение по часовой – положительное)
- Yaw: фактическое направление носа, в сантиметро-градусы, 0 = север.
- NavYaw: желаемое направление носа в сантиметро-градусов.
ATUN (обзор автонастройки)
- Ось: 0 = Roll , 1 = Pitch
- TuneStep: 0 = Возвращение к уровню (по горизонту) (до или после испытания),
1 = тестирование (т.е. выполнение подергивания, что бы проверить реакцию),
2 = обновление коэффициентов (дерганье завершено и применены коэффициенты) - RateMin: Минимальный записанный коэффициент во время теста
- RateMax: Максимальный записанный коэффициент во время теста
- RPGain: Коэффициент усиления P происходящего испытания
- RDGain: Коэффициент усиления D происходяего испытания
- SPGain Коэфициент стабилизации P происходяего испытания
ATDE (Auto Tune подробные шаги )
- Angle: угол квадрокоптера в сантиметро-градусах для оси которая проходит испытывается
- Rate: скорость вращения квадрокоптера для оси которая проходит испытания
CAM (время и место, когда затвор камеры был активирован)
- GPSTime: сообщенное время GPS в миллисекундах
- Lat: данные акселерометра оценка широты GPS
- Lon: данные акселерометра оценка долготы GPS
- Alt: данные акселерометра оценка высоты с барометра в сантиметрах над землей
- Roll: угол крена квадрокоптера в сантиметро-градусах
- Pitch: угол наклона квадрокоптера в сантиметро-градусах
- Yaw: курсовое направление в сантиметро-градусах
CMD (команды, полученные от наземной станции или как часть выполняемой миссии)
COMPASS (“сырые данные” компаса, смещения и значения коррекции compassmot)
- MagX, Magy. Magz: “сырые значения” магнитного поля для х, у и z осей
- OfsX, OfsY, OfsZ: “сырье значения” магнитного смещения (изменятся только тогда, когда параметр COMPASS_LEARN 1)
- MOfsX, MOfsY, MOfsZ: compassmot компенсация дроссельной заслонкой или тока
CURRENT (напряжение батареи, ток бортовое напряжение )
- Thr: подаваемое пилотом газ дроссельной заслонки (от 0 до 1000)
- ThrInt: встроенный дроссель (т.е. сумма общего выхода дроссельной заслонки для этого полета)
- Volt: напряжение батареи в вольтах * 100
- Curr: ток от батареи в амперах * 100
- Vcc: напряжение на плате
- CurrTot: общий ток, протекающий от батареи
CTUN (информация дросельной заслонки и высоты)
- ThrIn: дроссель пилота в виде числа от 0 до 1000
- SonAlt: высота над землей в соответствии с гидролокатором
- BarAlt: высота над землей в соответствии с барометром
- WPAlt: желаемая высота в то время когда полетный режим AltHold, Loiter, RTL, AUTO
- NavThr: не используется
- AngBst: дроссельной увеличение (от 0 ~ 1000), как результат обучениям полета квадрокоптера
(автоматически добавляется ко всем пилотным и автопилотным дросселям, чтобы уменьшить потерю высоты во время обучения) - CRate: акселерометр оценка скороподъемности барометра в см/с
- ThrOut: окончательное значение вывода дроссельного газа посланому к двигателям (от 0 до 1000). Обычно равен ThrIn AngBst в режиме стабилизации.
- DCRate: – пилотируемое желание скороподъемности в см/с
D32, DU32 (отдельные значения данных, которые либо целые 32 битные или целые 32 битные числа без знака):
ERR (сообщения об ошибке)
Подсистемы и коды ошибок перечислены ниже
- 1: Главная (никогда не используется)
- 2: Radio
- ECODE 1: “Последний кадр”, что означает, что PPM кодер АРМ в не получала обновления более 2 секунд
- ECODE 0: ошибка решена, что означает, что PPM кодер начал получать данные снова
- 3: Compass
- ECODE 1: компас не удалось инициализировать (вероятно аппаратная проблема)
- ECODE 2: сбой при попытке прочитать одно значение из компаса (вероятно аппаратная проблема)
- ECODE 0: ошибоки выше решены
- 4: Optical Flow
- ECODE 1: не удалось инициализировать (вероятно аппаратная проблема)
- 5: Throttle failsafe
- ECODE 1: дроссель упала ниже FS_THR_VALUE – это означает вероятную потерю контакта между приемником и передатчиком (Rx / Tx)
- ECODE 0: ошибока выше решена, контакт передатчика и приемника восстановлен
- 6: Battery failsafe
- ECODE 1: напряжение батареи упало ниже LOW_VOLT или общая емкость батареи превысила BATT_CAPACITY
- 7: GPS failsafe
- ECODE 1: потеря GPS фиксации по крайней мере как минимум 5 секунд
- ECODE 0: GPS фиксация восстановлена
- 8: Ground Station (Наземная станция) failsafe
- ECODE 1: обновления от наземной станции потеряна как минимум 5 секунд
- ECODE 0: обновления от наземной станции восстановлено
- 9: Fence
- ECODE 1: нарушена высота ограждения
- ECODE 2: круговой забор нарушен
- ECODE 3: высота и круговая ограда нарушены
- ECODE 0: аппарат вернулся внутрь забора
- 10: Flight Mode
- ECODE 0 ~ 10: квадрокоптер не смог переключиться на требуемый режим полета
- (0 = Stabilize, 1 = Acro, 2 = AltHold, 3 = AUTO, 4 = Guided, 5 = Loiter, 6 = RTL, 7 = Круг, 8 = Position, 9 = Land, 10 = OF_Loiter)
- 11: GPS
- ECODE 2: GPS Глюк
- ECODE 0: GPS Глюк устранен
- 12: Crash Check (проверка крушения)
- ECODE 1: Крушение обнаружено
EV (номер события) Полный список возможных событий можно найти в defines.h , но наиболее распространненые являются:
- 10 = Снят с охраны (Arming)
- 11 = Поставлен на охрану (Disarmig)
- 15 = Автоматическое снятие с охраны – (Auto Armed) (пилот поднял газ выше нуля и автопилот может свободно взять под контроль дроссельной заслонки)
- 16 = Взлёт (TakeOff)
- 18 = Полная посадка (Land Complete)
- 25 = Установка “Дома” (Set Home) (домашние координаты, которые былы захвачены)
GPS:
- Status – 0 = нет GPS, 1 = есть GPS, но без фиксации спутников, 2 = GPS с 2D фиксацией, 3 = GPS с 3D фиксацией
- Time: при GPS сообщили время с начала эпохи в миллисекундах
- NSats: количество используемых спутников
- HDOP : мера точности GPS (1,5 хорошо, больше 2.0 не так хорошо)
- Lat: Широта в соответствии с GPS
- LngG: Долгота в соответствии с GPS
- RelAlt: Акселерометр Баро высота в метрах
- Alt: GPS высота (не используется контроллером полета)
- SPD: горизонтальная скорость движения в м / с
- GCrs: наземный курс в градусах (0 = север)
IMU (информация акселерометра и гироскопа)
- GyrX, GyrY, GyrZ: “сырые данные” вращения гироскопа в градусах/секунды
- AccX, Accy, AccZ: “сырые данные” значения акселерометра в м/с/с
INAV (инерциально-позиционная навигация и оценка скорости)
- Balt: высота барометра в см
- IALT: инерциальная оценка высоты навигации в см
- IClb: инерциальная навигационной оценкам скороподъемность в см/с
- ACorrX. ACorrY, ACorrZ: х, у и z-ось коррекции акселерометр в см/с/с
- GLat, Glon: GPS широта и долгота от дома
- ILat, ILng: инерциальная навигационная широта и долгота от “дома”
Mode (полетный режим)
- Режим: режим полета отображается как строка (т.е. STABILIZE, LOITER, и т.д.)
- ThrCrs: дроссельной круиз (от 0 ~ 1000), который является дополнением автопилота, чтобы работать дросселем для поддержания стабильного наведения
NTUN (Навигационная информация)
- WPDst: расстояние до следующей точки (или цель замирания) в см. Обновляются только в то время, когда режим LOITER, RTL, AUTO.
- WPBrg: “подшипник” (поворот?) до следующей точки в градусах
- PErX: расстояние до промежуточного ориентира между квадрокоптером и следующей точки в направлении широты
- PErY: расстояние до промежуточного ориентира между квадрокоптером и следующей точки в направлении долготы
- DVelX: желаемая скорость в см/с в направлении широты
- DVelY: желаемый скорость в см/с в направлении долготы
- VelX: оценка фактической скорости (акселерометр скорость GPS) в направлении широты
- Vely: оценка фактическая скорости (акселерометр скорость GPS) в направлении долготы
- DAcX: желаемое ускорение в см/с/с в направлении широты
- Dacy: желаемое ускорение в см/с/с в направлении долготы
- DRol: нужный угол крена (roll) в сантиметро-градусов
- DPIT: желаемый угол наклона (pitch) в сантиметро-градусов
PM (мониторинг производительности)
- RenCnt: DCM Количество ренормализационная – большое количество может указывать на проблемы в DCM (крайне редко)
- RenBlw: DCM ренормализационная раздутие Количество – сколько раз DCM пришлось полностью перестроить матрицу DCM с момента последнего мониторинга производительности.
Обычно безобидное чило, но это число, постоянно растет может быть признаком того, что DCM имеет проблемы расчета отношения (крайне редко) - FixCnt: количество GPS исправлений, полученных после последнего сообщения PM (трудно себе представить, как это будет полезно)
- NLon: количество длительных основных петель (т.е. петли, которые принимают более 5% , чем 10 мс они должны)
- NLoop: было показано общее количество петель после последнего сообщения PM. Обычно 1000 и позволяет вычислить процент медленных петель,
которые никогда не должны быть выше, чем 15%. - MaxT: максимальное время, что любой цикл принял после последнего сообщения PM. Это значение должно быть близко к 10 000,
но будет до 6000000 в течение интервала, когда двигатели сняты с охраны (armed) - PMT: число, увеличивается на единицу каждый раз, когда удар сердца, полученную от наземной станции
- I2CErr: количество ошибок I2C после последнего сообщения PM.
Любые ошибки I2C может указывать на проблему на шине I2C,
которые могут, в свою очередь, замедлить основной цикл и вызвать проблемы с производительностью.
RCOUT ( PWM/ШИМ выход для отдельных каналов )
- RC1, RC2, и т.д.: команда ШИМ отправлено от контроллера полета к выходу ESC / двигатель / RC
Полетный контроллер apm 2.6,обзор и полная видеоинструкция.
Всем привет!!! Очень давно не заходил на
mysku.club
и не писал обзоры, от части из за не хватки времени, от части из за ситуации в Украине 🙁
В общем выдался свободный вечер и решил написать обзор, по моему любимому контроллеру
APM 2.6
, так как набралось большое количество видео материала по настройке и сборке.Но думаю писать я буду по минимум, за то будет очень много видеороликов, не зря же я столько работы проделал :)Нус, начнемс.
Контроллер АРМ на сегодня самый многофункциональный и не дорогой, его используют чаще всего на мультикоптерах (прошивка Arducopter ) и на самолетах (прошивка Ardupilot) а также поддерживает автомобиль и вертолет, в общем вот платформы которые поддерживает контроллер :

У АРМ самое большое количество полетных режимов из всех контроллеров что есть на рынке, возможность управлять дроном с помощью смартфона или планшета, при этом открывается огромный функционал: создание полетного задания, управление, переключение режимов, мониторинг и телеметрия с указанием всех данных, и многое другое… Минус этого контроллера в том, что он не летает из «коробки», а требует знаний и серьезной подготовки.Но я в своих видео максимально просто и подробно постарался объяснить от А до Я, надеюсь поможет новичкам, и будет полезен людям кто решил освоить АРМ.
В данной статье и видео будет рассмотрено подключение контроллера к квадрокоптеру, в дальнейшем будет такой же видео курс по Ardupilot то есть по установке на самолет.
В апреле месяце появился на Бангуде полный комплект АРМ 2.6 за соблазнительные 137 доллара, на то время это была наверное самая низкая цена за такой комплект.
Я конечно ожидал подвоха за такую цену, но жабка одобрительно кивнула и ее в последствии не разочаровал, комплект оказался качественным, и все сразу работало.Посылка дошла очень быстро, даже двух недель не прошло.
Комплект поставки в себя включал: контроллер АРМ уже с коробочкой, демпферная площадка под контроллер,GPS модуль с магнитометром в корпусе и со стоечкой, радиотелеметрия 433мГц,Minimosd и Power Module, не плохо за такую сумму 🙂 (видео с распаковкой и комплектацией выше в начале статьи) Единственное чего нет в комплекте, и будет нужно для прошивки ОСД это FTDI программатор, его можно купить там же на Бангуде, ТЫЦ

Первое что желательно сделать это прошить PPM-encoder, это нас сразу убережет от дальнейших танцев с бубном.В любом случае всегда желательно залить свежую прошивку PPM-encoder для правильной отработки при фалсейве.Инструкция по прошивке:
Ссылка на прошивку PPM:
Ссылка на прогу Flip
:
www.atmel.com/tools/FLIP.aspx
Так же можно сразу залить правильный конфиг в модуль GPS, хоть в данном наборе ГПС работал нормально, я все равно перестраховался.Инструкция по настройке GPS:
Ссылка на прогу U-centr:
Ссылка на Конфигурационный файл с настройкой для APM
:
Приступаем к сборке, подключению и прошивке самого контроллера.Подробно в этом видео:
После подключения и прошивки, необходимо настроить Пиды квадрокоптера.
Простая настройка PID значения Pitch and Roll с помощью крутилки на аппаратуре:
Более продвинутая настройка PID с помощью режима Autotune mode:
После настройки пидов, пришло время подключить радиотелеметрию.Подробно о использовании телеметрии с смартфоном или планшетом, а так же о полетных режимах и настройки Фалсейва:
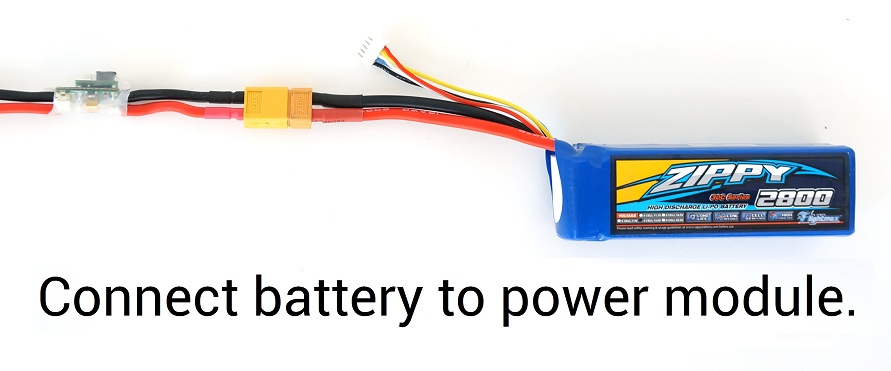
Теперь после всех настроек можно подключать Power Module, но его мы будем использовать только как датчик тока.Видео о настройке и по подключению:
Пред подключением ОСД и использования квадрокоптера для FPV полетов, стоит задуматься о правильном питании контроллера.Так как все отказы АРМ происходят именно из за плохого питания.Подробно о правильной запитке контроллера:
Ну или если нет возможности организовать питание как у меня, купить любой ВЕК на 5волт, хотя он на 100% надежен не будет.А запитывать от любого Power Module который позиционируется как для АРМ, я вообще не рекомендую, только использовать как датчик тока.
Настало время подключить MinimOSD.Подробно о прошивке, настройке и подключению:
Теперь можно летать и радоваться 🙂
Надеюсь вам понравился мой вариант статьи: Мало букаФ-Много фильмов 🙂
Пройдя поэтапно все настройки согласно моих видеоинструкций, вы наверняка взлетите.Думаю видео материала вам будет достаточно для постижения дзена контроллера АРМ, и целого дня чтоб все пересмотреть.
Ставим лайки кому понравилась проделанная работа по видеоурокам, а так же чтоб у меня был стимул сделать подобный курс по Ардупилоту.
Понимание конвенций
Как быстро может разряжаться батраейка – это и есть максимальный ток разряда.
Ток оценивается параметром С для аккумулятора.
С – сколько времени требуется, чтобы разрядить аккумулятор в долях часа.
Например 1C разряжает батарею в 1/1 часа или за 1 час.
2С разряжает батарею за полчаса.
Все хоббийные батареи рассчитаны в милли ампер-часов.
Если аккумулятор рассчитан на 2000 мАч и вы разряжаете его током 2000mA (или 2А, 1А = 1000mA) он будет полностью разряжен в течение одного часа.
Параметр C батареи показывает на способность разряда.
Все батареи имеют ограничения относительно того, как быстро они разряжаться.
Из-за этого многие LiPo батареки ставятся параллельно, чтобы увеличить силу тока у аккумулятора.
Когда 2 батареи подключены плюс к плюсу, а минус к минусу они становятся как одной батареи с двойной мощностью.
Если у вас есть две 2000mAh ячейки и вы подключить их параллельно, то результат будет таким же, как одна на 4000mAh.
Эта ячейка на 4000mAh имеет такой же параметр токаотдачи C как и оригинальная ячейка на 2000mAh.
Таким образом, если ячейки на 2000mAh могут дать токоотдачу в 5С максимум, или 10 ампер, то свежесобранная ячейка в 4000mAh может выдавать
5С или (4000mA х 5) 20 ампер.
Такой метод подключения аккумуляторов позволяет использовать более высокие токи.
Соглашение об именах, которое позволяет расшифровать, сколько ячеек параллельно и сколько в серии является метод XSXP.
Число перед S показывает количество последовательно соединенных ячеек у батарейки, например 3S означает, что это 3-секционная батарейка.
Число перед P означает количество параллельно соединеных ячеек. Так 3S4P батарейка на 2100mAh имеет в общей сложности 12 ячеек внутри.
Она будет иметь напряжение как и любая другая батарейка 3S, так как число ячеек определяет напряжение.
И она будет иметь больше токоотдачу в 4 раза больше из-за 12 отдельных ячеек.
Просмотр содержимого
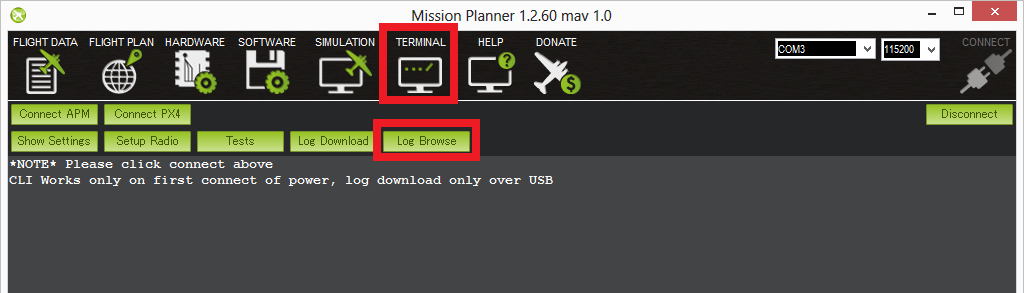
Файлы журналов могут быть открыты для анализа. Выполните следующие действия:
- Откройте экран Terminal ПО Mission Planner
- Нажмите кнопку “Log Browse” и укажите на один из файлов с расширением log
Экран с графиком обозревателя журналов появится перед вами. Размеры графика моугут быть изменены,
нажмите и удерживайте мышкой непосредственно под графиком.
Основным форматом журнала являются:
- На левой стороне отображаются номера строки
- Версия ПО и платы отображаются в самом начале (вверху)
- Следующими идут FTM сообщения, показывающие заголовки колонок для каждого типа сообщения
- PARM строки , которык показывают каждый параметр (в том порядке, в котором они появляются в EEPROM) вместе с их
первоначальными значениями - Сообщения полетных данных, включая GPS, IMU и другие

Отображения графика полетных данных осуществляеся нажатием на соответствующую строку, вы должны увидеть заголовки столбцов
соответсвующим образом. Далее найдите столбец, который вы хотите построить на графике, нажмите на него, а
затем нажмите “Graph this data”. В приведенном выше примере отображатся ATT Roll-in и Roll данные.
Покрутите колесиком мышки , что бы увеличить или уменьшить масштаб графика. Вы так же можете выбрать область на графике, что бы увеличить масштаб на нем.
Если щелкнуть правой кнопкой мыши и выбырать “Set Scale defaul” то масштаб установиться маштабом по-умолчанию.
вот мини руководсво по использованию этого.
Вы так же можете отфильтровать только только по первой колонке (сообщения полета),
нажав на первом столбце и выбрав тип сообщения из раскрывшающегося списка. Это очень полезно,
особенно для просмотров различных полетных режимов (называемое “MODE” режимом),
используемых в ходе миссии. Нажмите на первый столбец снова и выберите “Cancel” что бы сбросить фильтр.

Советы которые смогут помочь защитить ваш аппарат от повреждений
- 1) избегайте резких и экстремальных полетов
- а) перемещайте стики плавно и не дёргайте их.
- б) если аппарат хорошо сбалансирован и настрое, то он потребует небольшое отклонение стиков, в отличии от “плавающих” и “кривых” аппаратов.
- 2) аппарат должен быть более менее стабильным в горизонтальной плоскости и не иметь дополнительных тримов с аппаратуры.
- а) если коптер “гуляет” в полете, вам прийдется отримировать его с аппаратуры.
- 3) будьте осторожны при подаче большого газа , так как аппарат может получить или потерять высоту (просадка батареи по мощности и нехватка газа на моторы с отключением мозгов и их перезагрузкой).
- 4) так как мультикоптеры симметричны вам очень лего дизарентироваться и потерять его в ориентации.
- а) для ручных полетов ориентация является важной частью для полетов, следите за ней
- б) во время обучения сохранайте орентацию аппарата с момента взлета и контролируйте её.
- в) рекомендуется по началу летать на растояние не более 10м но и не ближе , чем 3 м к себе.
- г) если вы отлетаете дальше чем 30 метров, то очень легко потерять ориентацию в пространстве – это может привети к аварии.
- д) если вы потеряли осевую ориентации (Yaw) во время полета, то попробуйте в режиме стабилизации лететь вперед и спользуя повоторы вокруг оси направлять его как автомобиль.
- е) это гораздо лучше, чем просто спуститься на землю не понимая орентацию, еще хуже – улететь.
- ж) отлетая часто получается , что наклоняя аппарат назад к пилоту вы видете , что он может отдаляться – это происходит из-за потери ориентации.
- з) Результат этого – аппарат улетает и разбивается.
- 5) всегда имейте режим стабилизации на аппаратуре.
- 6) порывы ветра могут сделать полет значительно труднее
- а) сильный ветер может препядствовать движению аппарата или вовсе загрутить его вокруг.
- б) чем выше вы находитесь на местносте , тем больше вероятность сильных ветров.
- в) переключение в режим Стабилизации и посадка позволит вам сохранить аппарат перед тем, как у вас появятся новые навыки пилотирования
- г) Избегайте высоких и скоростных полетов в разных режимов пока не появилась значительная увереность в пилотировании.
- д) при полете вокруг деревьев очень легко потерять визуальный контакт и ориентацию
- е) порывы ветра вокруг объектов, зданий, сооружений могут усугубить пилотирование
- ж) потеря радиосигнала тоже вероятна и может произойти в неподходящий момент.
- з) если ваш аппарат приближается к потенциальной помехе, то следует переключиться на режим стабилизации и вернуть его к себе.
- 7) Ardupilot конкретные спобобы безопасности: RTL, FailSafe , GeoFence
- а) RTL может обеспечить безопасное возращение к месту запуска, если он получит команду от вас.
- б) настройка FailSafe на радиомодуле может быть выполнена командами RTL или Auto Land , что бы сохранить аппарат и предотвратить от травм себя и окружающих.
- в) GeoFence устанвливает автоматический периметр, который заставит аппарат оставаться в безопасном месте.
- г) Не следует пологаться на выше указаные режимы для обеспечения безопасности, у вас всегда должна быть мысль о переводе аппарат в режим стабилизиции и переход в ручное управление, если что-то пойдёт не так.
- д) особенно не пологайтесь на эти режимы выполняя обучение или какие-либо другие маневры.
- е) эти режимы являюся дополнением и не являются заменой в безопасности
- 8) о первом взлете или о настройки контроллера
- а) в режиме стабилизации двигайте стик газа медленно, пока аппарат не зависнет
- б) если аппарат пытается перевернуться – опустите газ и устраните проблемму.
- в) двигатели могут быть настроены в неправильном направлении (см. схемы подключения)
- г) могут быть неправильно установлены пропеллеры
- д) если аппарат пытается крутиться вокруг своей оси или улететь в некотором направлении
- е) передатчик или настройки аппаратуры могут быть не правильными
- ж) двигатели или регуляторы могут быть настроены не правильно
- з) не правильные пропеллеры могут быть надеты не правильно на моторы
- 9) при полете FPV (вид от первого лица) с видеокамерой , вы должны иметь режимы: стабилизация , simple mode и RTL
- а) убедитесь, что RTL работает правильно перед использованием FPV
- б) используйте режим стабилизации при FPV полетах
- в) Если видеосвязь FPV прервалась вы можите переключить на simple mode или RTL для возращения домой.
- 10) убедитесь, что Ваш аккумулятор закреплен надежно
- а) используйте крепление-липучки
- б) можно использовать вклеенну поддержку для батареи для лучшего держания липучки.
и) если аппарат не может висеть стабильно над землей на уровне 2м то стоит решить эту проблему.
