
Faq по схемотехнике борта. что, куда и как подключать в различных случаях.
В простейшем случае все достаточно просто. Имеем:
- БК мотор
- БК регулятор со схемой BEC (Battery Eliminator Circuit)
- Батарею питания (от 1 до нескольких банок LiPo)
- Приемник на 4-8 каналов управления
- 1-2-3 рулевые машинки

Схема 1. Простейший борт.
Здесь все просто. Используя обычные кабели соединяем все как показано на схеме 1. Мотор присоединяется к трем соответствующим проводам регулятора (три толстых провода одного или разных цветов – как правило на них есть маркировка), три тонких цветных провода регулятора (черный,красный и желтый) включаются чаще всего в третий канал приемника. Черный провод это земляная шина и “-” питания, красный это ” ” питания приемника и рулевых машинок, а желтый провод (иногда белый) – это шина управления регулятором по каналу “газ”. В последнюю очередь, обычно перед запуском модели, подключаются провода идущие к батареи. Это два очень толстых провода, которые как правило расположены на регуляторе с двух сторон, по краям, вокруг тонкой, трехжильной шины питания-управления уходящей на приемник, черный идет к “-” батареи, а красный соответственно к ” ” силового разъема батареи.
Назначение регулятора в этой схеме двойное. С одной стороны он формирует диаграмму и напряжение питания мотора, а с другое преобразовывает высокое напряжение батареи 7.4-14.8 вольт с помощью схемы BEC (или UBEC) в напряжение питания приемника и РМ (4.8-6.0 В).
Каждая рулевая машинка, в свою очередь, присоединяется к соответствующему каналу приемника трехжильным проводом с помощью штатного разъема. Цвета отдельных проводов такие же как на шине управления регулятором: черный – земля и “-” питания РМ, красный ” ” питания, а желтый или черный это сигнальная шина управления РМ. Таким образом, ток питания снимется с BEC (UBEC) регулятора, проходит в приемник и там распределяется по рулевым машинкам.
В простейшей схеме очень важно не перегрузить BEC регулятора. Сумма максимальных токов потребления всех рулевых машинок не должна превышать максимально возможную токоотдачу схемы BEC. Как правило максимальная токоотдача схемы BEC в большинстве регуляторов имеет значение порядка 1.5-3 ампера. Ток потребления рулевых машинок в спокойном состоянии чаще всего небольшой (20-50 mА), но очень сильно возрастает во время работы под нагрузкой и может достигать в режиме удержания (когда машика уже не может повернуть рычаг, но еще в состоянии его удерживать в неподвижном положении) величины порядка 1.0-1.5 ампера. Таким образом суммарный ток потребления РМ в наихудшем случае иногда может достигнуть величины в 3 ампера и более. Однако при рассмотрении этой простейшей схемы мы будем считать, что с током потребления РМ у нас все в порядке. Обычно в всего случае 3-4 РМ мощности схемы BEC почти всегда достаточно для питания всех РМ в любых режимах при обычных примениях. Заметим только то, что весь этот ток идет от BEC через приемник и только потом поступает в РМ-ы. Не очень хорошо, но для простейшей схемы более-менее допустимо. Пока просто запомним этот факт.
Требования к аккумуляторной батарее очень простые: она должна обеспечивать токоотдачу равную или больше максимального тока потребления мотора плюс максимально возможный суммарный ток потребления всех РМ и приемника. От емкости аккумуляторной батареи будет зависеть время полета вашей модели. Время полета в часах можно вычислить так: берем емкость батареи в мАч и делим на средний ток потребления всего борта (ток приемника средний ток всех РМ средний ток мотора). Результатом будет количество часов полета в часах… К примеру батарея иммет емкость 2000 мАч, ток потребления мотора – 10 ампер или 10000мА, ток потребления приемника ~ 20 мА, а средний ток потребления каждой РМ – 50 мАч. Сумма токов будет 10170 мА (т.е. в основном это ток мотора). Делим 2000 мАч на 10170: 2000/10170 = 0.197 часа или около 12 минут полета на среднем газе. На максимальном газу время полета естественно сократится.
Отдельный вариант схемы 1, для случая коллекторного мотора мы рассматривать не будем, т.к. он совершенно тривиален. Отличие только в том, что используется регулятор именно для коллекторного мотора, а не регулятор для БК-мотора. Он отличается от нашего случая тем, что имеет только два провода идушие к коллекторному мотору, который также имеет только два провода питания. Все остальное в Схеме 1 остается точно таким же.
Вот пожалуй и все что нужно знать для начала в случае простейшего борта на Схеме 1.
Один из наиболее часто возникающих вопросов у новичков: а как подключать два или больше моторов? В случае подключения одинаковых коллекторных моторов для многомоторной модели все достаточно тривиально: моторы просто подключаются параллельно к двум проводам регулятора, предназначенных для питания мотора. Если надо получить вращение мотров в разные стороны, то на одном из них изменяется полярность питания(т.е. меняются местами два провода) и все. Самое главное, что нужно не забывать, это то, что максимальный ток регулятора отдаваемый моторам должен быть не меньше суммы максимальных токов потребления всех моторов, а лучше больше хотя бы с небольшим запасом. В идеале токоодача регулятора должна быть больше чем N*Iост, где N-количество моторов, а Iост – это ток потребления мотора в режиме остановки(когда его вал не может провернуться из-за нагрузки – к примеру его заклинило, или мы сами не даем провернуться удерживая винт модели).
Для нескольких БК-моторов все становится существенно сложнее. Каждый БК-мотор должен иметь свой регулятор оборотов. Дело тут в том, что Регулятор не только изменяет величину напряжения и тока протекающего через мотор, но и еще формирует вполне определенную диаграмму включения-выключения обмоток БК-мотора, отслеживая положение ротора мотора по ЭДС самоиндукции, возникающей при вращении ротора. Соединять БК-моторы просто впараллель категорически не рекомендуется и даже просто запрещается.
Не верьте никому, кто Вам скажет: а вот я соединил и они у меня вертятся хорошо. Да – без нагрузки обычно крутиться будут, т.к. повторяемость параметров моторов достаточно высокая и они на холостом ходу без нагрузки, как правило, будут оба крутиться синхронно. Но как только появится нагрузка – так все и закончится. Нагрузка на одном моторе неизбежно будет отличаться от нагрузки на другом – причин для этого очень много: чуть разные винты, разные режимы обдува винтов при повороте модели, в конце-концов разное количество грязи, которое попало в подшипники – да мало ли что… В итоге произойдет рассинхронизация моторов, импульсы ЭДС самоиндукции и ее диаграммы будут разными, они просуммируются, и не будут соответствовать ничему. Это запутает регулятор и диаграмма импульсов от регулятора к моторам станет неправильной, что приведет в конце-концов к остановке одного или обоих моторов и к их перегреву.
Правильная схема подключения 2-х БК-моторов представлена ниже на Схеме 2.
 Схема 2. Простейший борт с двумя БК моторами.
Схема 2. Простейший борт с двумя БК моторами.
На Схеме 2 все почти так же как на схеме 1, но регуляторов два и два БК-мотора. Раширение схемы до тре-четырех моторов тривиально просто станет больше моторов и регуляторов. Что тут важно заметить? А то, что приемник и рулевые машинки питаются только от регулятора 1. На втором регуляторе на т.н. Y-кабеле красный провод перерезан (не присоединяется к приемнику) и питание приемника и РМ идет только от BEC Регулятора 1. Это важно запомнить и тщательно соблюдать в такой схеме. Нельзя соединять вместе красные провода разных BEC-ов. Да особенно и не нужно в нашем случае. Вариант их объединения через диоды Шоттки рассматривать тут не будем из-за его весьма низкой полезности.
Все остальное на Схеме 2 точно так же как на Схеме 1 и все сказанное про схему 1, также будет справедливо для схемы 2.
Теперь отдельно рассмотрим ток потребления РМ. Дело в том, что ток потребления рулевой машинки, в зависимости от нагрузки способен изменяться в десятки и сотни раз. В спокойном состоянии она потребляет от 20 мА до 50 мА, при интенсивном движении ее ток вырастает до 200-300-500 мА, в зависимости от ее конструкции, а при очень большой нагрузке может достигать величины в 1.0-1.5 Ампера. Все это было бы ничего – экстремальные нагрузки явление редкое, но вот в сложных случаях – количество РМ на модели растет и может достигать 10-12 и более штук.
Соответственно максимальный суммарный ток потребления РМ становится порядка тока потребления двигателя. Причем рамер РМ имеет очень малое значение. Совсем не факт что под критической нагрузкой мини(микро) РМ потребляет меньше чем полноразмерная машинка. Она может потреблять даже больше, чем большая РМ, – из-за меньшей эффективности двигателя. Вот теперь вспомните как проходит ток в простейшей схеме…. Вспомнили? Да – весь суммарный ток потребления от BEC идет прямо на разъем приемника, а внутри приемника расходится по кабелям РМ… Что будет с вашим приемником в критическом случае, когда к примеру 10-15 ампер пройдут через разъем канала газа? Приемник перегреется как минимум, а как максимум просто погорит со взрывом и мгновенным испарением печатных проводников на плате. Слава богу почти никакой BEC такой ток выдать не способен. Но тут другая засада.
BEC такой ток дать не может но, перегревается и напряжение на его выходе резко падает до тех пор, пока нагрузка на РМ не упадет и не снизится их ток потребления. Чем черевато падение напряжения питания борта? А тем, что приемник это почуствует и перезапустится… Современные приемники на 2.4 Ггц вначале работы(после включения питания) довольно долго ищут свой передатчик (Bind приемника) и синхронизируются с ним в течении нескольких секунд. Старые FM-приемники 35-40 мГц этой особенности не имели – ну упало напряжение и упало, выключился-включился когда оно поднялось и почти порядок… Сейчас как правило еще несколько секунд после провала-подъема напряжения приемник не в состоянии управлять РМ…. Ну вот и представьте себе – заход на посадку, интенсивная работа всеми рулями, выпуск шасси, выпуск закрылков – вот вам уже перегрузка BEC – все работает практически одновременно – почти все рулевые машинки, да еще и под большой нагрузкой, т.к. углы отклонения рулей могут быть значительно больше обычных. Просело напряжение питания и привет, – в последние 3-5 секунд, у самой земли, модель теряет управление (пилот в обмороке). Результат – дрова.
Вывод из этого длинного пассажа: нельзя использовать простейшую схему соединения элементов борта, если число РМ превышает 3-4 штуки.
Видео 1. Токопотребление РМ под нагрузкой..
Для пущей убедительности посмотрите ролик про рост тока потребления РМ под высокой нагрузкой. Или покопайтесь на сайтах rcgroup.com – там много сообщений о замерах токопотребления РМ в разных режимах работы. К сожалению такой информации в одном месте Вы нигде не найдете – производители скромно умалчивают о потреблении РМ под нагрузкой и вообще как правило о токе потребления не говорят, а совершенно зря. Я лично уже давно, прежде чем ставить борт в модель стараюсь сам измерерить возможные токи РМ в различных режимах. Именно это я рекомендую делать и Вам.
Это нетрудно – любой измеритель мощности(их много есть на Паркфлайере) включаете в цепь аккумулятора, отключаете мотор, фиксируете ток потребления борта в покое. Затем как можно больше и беспорядочнее двигаете все рулевые машинки и снова фиксируете токи – это будет ток потребления при работе РМ без нагрузки. Затем, закрепив машинки любым подходяшим способом, фиксируете среднее положение коромысел с помощью пружин или резинок под каким-нибудь натяжением иммитирующим вашу нагрузку и измерение повторяете снова интенсивно двигая все машинки – вот это и будет максимальный ток потребления сразу всеми РМ. Не забудьте также контролировать напряжение на выходе BEC отдельным вольтметром во время всех этих манипуляций – оно должно быть не ниже чем нужно приемнику для уверенной работы. Вот только путем таких измерений можно избежать проблем – т.к. никаких официальных данных по токопотреблению под нагрузкой нет.
Схема соединения элементов борта, учитывающая описанные выше проблемы, для случая шести РМ приеведена на Схеме 3 ниже.

Схема 3. Мощный борт. Раздельное питание разных групп РМ.
Здесь для питания второй группы РМ использован отдельный BEC не слишком большой мощности, сравнимый со встроенным BEC регулятора. Первые три машинки питаются по прежнему через приемник от BEС регулятора, и регулятор и приемник это выдержат. А для питания второй группы машинок используется независимы BEC с отдельной шиной питания Шина 2 (см схему). Кроме того, чтобы избежать прохождение большого тока через приемник проведена отдельная земляная шина ко всем РМ – это сушественно уменьшит нагрузку на внутренние проводники приемника. Детали соединений рассматривайте сами, все схемы кликабельны и их можно рассматривать в деталях. Простое пересечение шин на схеме – это не контакт – это просто прводники пересеклись без контакта. А там где проводники должны контактировать, там поставлена жирная круглая точка на пересечении. Естественно для такого соединения стандартные кабели уже не годятся, их так или иначе придется модернизировать. Как и какие разъемы для этого использовать – решайте сами – Вы на то и моделисты. Я не скоро возьмусь за модель с большим количеством РМ на борту скорее всего, потому мануала “Как это спаять” не ждите пока, у меня сейчас много другой работы, а от старых решений фоток не сохранилось.
Третья схема возможна во многих вариантах. Например в схеме с двумя и более моторами 2 и более регулятора, независимый BEC не нужен – вторую группу машинок можно запитать по Шине 2 от второго BEC-а, который в схеме 2 был незадействован, сделать можно по аналогично тому, как это сделано на схеме 3. Другой вариант: берем независимый BEС помощнее и все машинки запитываем только от него и вообще не используем BEC регулятора или от него запитывает один только приемник и тогда провалы на шине 2(питания РМ) нам будут не страшны – приемник их не увидит. В общем допустимых вариантов много.
Последнее замечание в этой статье: выбирая между линейным BEC и импульсным (трансформаторным) UBEC, я бы сделал выбор в пользу UBEC, помехи от него не так значительны как их часто расписывают и от них легко защититься, зато мощность он обычно имеет большую и не греется так как линейный. Это происходит потому, что в линейном BEС лишнее напряжение по сути переводится в тепло (прикиньте – ток 1-3 ампера и при батарее 14.8 вольта 10 вольт гасится на внутреннем сопротивлении самого BEC – т.е. он рассеивает тепловую мощность от 10 до 30 ватт!). А это между протчим далеко не лишняя энергия. Модель сможет летать существенно дольше при той же батарее, если использовать регуляторы с UBEC вместо BEC.
Да – еще одно(самое последнее) замечание, на первой схеме у меня показана аккумуляторная батарея от 1S до 4S, а я везде говорю про питание РМ и приемника от 4.8 до 6 вольт. Это не ошибка! На парклайере есть регуляторы 1S c импульсным, повышающим BEС, который имеет выходное напряжение порядка 5-6 вольт – я такой пользую если мне нужно 5-ти вольтовое питание от одной банки LiPo….
Здесь я сосредоточился только на мощностных аспектах схемы борта и оставил за бортом изложения например борьбу с помехами приемника, за рамками изложения остались так же вопросы подключения оборудования FPV и другого оборудования современных моделей, но нельзя объять необятное за один раз и сразу. Это все оставим для других авторов и другого случая…
Успехов Вам в конструировании бортов!
Николай П.
§
В простейшем случае все достаточно просто. Имеем:
- БК мотор
- БК регулятор со схемой BEC (Battery Eliminator Circuit)
- Батарею питания (от 1 до нескольких банок LiPo)
- Приемник на 4-8 каналов управления
- 1-2-3 рулевые машинки
Схема 1. Простейший борт.
Здесь все просто. Используя обычные кабели соединяем все как показано на схеме 1. Мотор присоединяется к трем соответствующим проводам регулятора (три толстых провода одного или разных цветов – как правило на них есть маркировка), три тонких цветных провода регулятора (черный,красный и желтый) включаются чаще всего в третий канал приемника. Черный провод это земляная шина и “-” питания, красный это ” ” питания приемника и рулевых машинок, а желтый провод (иногда белый) – это шина управления регулятором по каналу “газ”. В последнюю очередь, обычно перед запуском модели, подключаются провода идущие к батареи. Это два очень толстых провода, которые как правило расположены на регуляторе с двух сторон, по краям, вокруг тонкой, трехжильной шины питания-управления уходящей на приемник, черный идет к “-” батареи, а красный соответственно к ” ” силового разъема батареи.
Назначение регулятора в этой схеме двойное. С одной стороны он формирует диаграмму и напряжение питания мотора, а с другое преобразовывает высокое напряжение батареи 7.4-14.8 вольт с помощью схемы BEC (или UBEC) в напряжение питания приемника и РМ (4.8-6.0 В).
Каждая рулевая машинка, в свою очередь, присоединяется к соответствующему каналу приемника трехжильным проводом с помощью штатного разъема. Цвета отдельных проводов такие же как на шине управления регулятором: черный – земля и “-” питания РМ, красный ” ” питания, а желтый или черный это сигнальная шина управления РМ. Таким образом, ток питания снимется с BEC (UBEC) регулятора, проходит в приемник и там распределяется по рулевым машинкам.
В простейшей схеме очень важно не перегрузить BEC регулятора. Сумма максимальных токов потребления всех рулевых машинок не должна превышать максимально возможную токоотдачу схемы BEC. Как правило максимальная токоотдача схемы BEC в большинстве регуляторов имеет значение порядка 1.5-3 ампера. Ток потребления рулевых машинок в спокойном состоянии чаще всего небольшой (20-50 mА), но очень сильно возрастает во время работы под нагрузкой и может достигать в режиме удержания (когда машика уже не может повернуть рычаг, но еще в состоянии его удерживать в неподвижном положении) величины порядка 1.0-1.5 ампера. Таким образом суммарный ток потребления РМ в наихудшем случае иногда может достигнуть величины в 3 ампера и более. Однако при рассмотрении этой простейшей схемы мы будем считать, что с током потребления РМ у нас все в порядке. Обычно в всего случае 3-4 РМ мощности схемы BEC почти всегда достаточно для питания всех РМ в любых режимах при обычных примениях. Заметим только то, что весь этот ток идет от BEC через приемник и только потом поступает в РМ-ы. Не очень хорошо, но для простейшей схемы более-менее допустимо. Пока просто запомним этот факт.
Требования к аккумуляторной батарее очень простые: она должна обеспечивать токоотдачу равную или больше максимального тока потребления мотора плюс максимально возможный суммарный ток потребления всех РМ и приемника. От емкости аккумуляторной батареи будет зависеть время полета вашей модели. Время полета в часах можно вычислить так: берем емкость батареи в мАч и делим на средний ток потребления всего борта (ток приемника средний ток всех РМ средний ток мотора). Результатом будет количество часов полета в часах… К примеру батарея иммет емкость 2000 мАч, ток потребления мотора – 10 ампер или 10000мА, ток потребления приемника ~ 20 мА, а средний ток потребления каждой РМ – 50 мАч. Сумма токов будет 10170 мА (т.е. в основном это ток мотора). Делим 2000 мАч на 10170: 2000/10170 = 0.197 часа или около 12 минут полета на среднем газе. На максимальном газу время полета естественно сократится.
Отдельный вариант схемы 1, для случая коллекторного мотора мы рассматривать не будем, т.к. он совершенно тривиален. Отличие только в том, что используется регулятор именно для коллекторного мотора, а не регулятор для БК-мотора. Он отличается от нашего случая тем, что имеет только два провода идушие к коллекторному мотору, который также имеет только два провода питания. Все остальное в Схеме 1 остается точно таким же.
Вот пожалуй и все что нужно знать для начала в случае простейшего борта на Схеме 1.
Один из наиболее часто возникающих вопросов у новичков: а как подключать два или больше моторов? В случае подключения одинаковых коллекторных моторов для многомоторной модели все достаточно тривиально: моторы просто подключаются параллельно к двум проводам регулятора, предназначенных для питания мотора. Если надо получить вращение мотров в разные стороны, то на одном из них изменяется полярность питания(т.е. меняются местами два провода) и все. Самое главное, что нужно не забывать, это то, что максимальный ток регулятора отдаваемый моторам должен быть не меньше суммы максимальных токов потребления всех моторов, а лучше больше хотя бы с небольшим запасом. В идеале токоодача регулятора должна быть больше чем N*Iост, где N-количество моторов, а Iост – это ток потребления мотора в режиме остановки(когда его вал не может провернуться из-за нагрузки – к примеру его заклинило, или мы сами не даем провернуться удерживая винт модели).
Для нескольких БК-моторов все становится существенно сложнее. Каждый БК-мотор должен иметь свой регулятор оборотов. Дело тут в том, что Регулятор не только изменяет величину напряжения и тока протекающего через мотор, но и еще формирует вполне определенную диаграмму включения-выключения обмоток БК-мотора, отслеживая положение ротора мотора по ЭДС самоиндукции, возникающей при вращении ротора. Соединять БК-моторы просто впараллель категорически не рекомендуется и даже просто запрещается.
Не верьте никому, кто Вам скажет: а вот я соединил и они у меня вертятся хорошо. Да – без нагрузки обычно крутиться будут, т.к. повторяемость параметров моторов достаточно высокая и они на холостом ходу без нагрузки, как правило, будут оба крутиться синхронно. Но как только появится нагрузка – так все и закончится. Нагрузка на одном моторе неизбежно будет отличаться от нагрузки на другом – причин для этого очень много: чуть разные винты, разные режимы обдува винтов при повороте модели, в конце-концов разное количество грязи, которое попало в подшипники – да мало ли что… В итоге произойдет рассинхронизация моторов, импульсы ЭДС самоиндукции и ее диаграммы будут разными, они просуммируются, и не будут соответствовать ничему. Это запутает регулятор и диаграмма импульсов от регулятора к моторам станет неправильной, что приведет в конце-концов к остановке одного или обоих моторов и к их перегреву.
Правильная схема подключения 2-х БК-моторов представлена ниже на Схеме 2.
Схема 2. Простейший борт с двумя БК моторами.
На Схеме 2 все почти так же как на схеме 1, но регуляторов два и два БК-мотора. Раширение схемы до тре-четырех моторов тривиально просто станет больше моторов и регуляторов. Что тут важно заметить? А то, что приемник и рулевые машинки питаются только от регулятора 1. На втором регуляторе на т.н. Y-кабеле красный провод перерезан (не присоединяется к приемнику) и питание приемника и РМ идет только от BEC Регулятора 1. Это важно запомнить и тщательно соблюдать в такой схеме. Нельзя соединять вместе красные провода разных BEC-ов. Да особенно и не нужно в нашем случае. Вариант их объединения через диоды Шоттки рассматривать тут не будем из-за его весьма низкой полезности.
Все остальное на Схеме 2 точно так же как на Схеме 1 и все сказанное про схему 1, также будет справедливо для схемы 2.
Теперь отдельно рассмотрим ток потребления РМ. Дело в том, что ток потребления рулевой машинки, в зависимости от нагрузки способен изменяться в десятки и сотни раз. В спокойном состоянии она потребляет от 20 мА до 50 мА, при интенсивном движении ее ток вырастает до 200-300-500 мА, в зависимости от ее конструкции, а при очень большой нагрузке может достигать величины в 1.0-1.5 Ампера. Все это было бы ничего – экстремальные нагрузки явление редкое, но вот в сложных случаях – количество РМ на модели растет и может достигать 10-12 и более штук.
Соответственно максимальный суммарный ток потребления РМ становится порядка тока потребления двигателя. Причем рамер РМ имеет очень малое значение. Совсем не факт что под критической нагрузкой мини(микро) РМ потребляет меньше чем полноразмерная машинка. Она может потреблять даже больше, чем большая РМ, – из-за меньшей эффективности двигателя. Вот теперь вспомните как проходит ток в простейшей схеме…. Вспомнили? Да – весь суммарный ток потребления от BEC идет прямо на разъем приемника, а внутри приемника расходится по кабелям РМ… Что будет с вашим приемником в критическом случае, когда к примеру 10-15 ампер пройдут через разъем канала газа? Приемник перегреется как минимум, а как максимум просто погорит со взрывом и мгновенным испарением печатных проводников на плате. Слава богу почти никакой BEC такой ток выдать не способен. Но тут другая засада.
BEC такой ток дать не может но, перегревается и напряжение на его выходе резко падает до тех пор, пока нагрузка на РМ не упадет и не снизится их ток потребления. Чем черевато падение напряжения питания борта? А тем, что приемник это почуствует и перезапустится… Современные приемники на 2.4 Ггц вначале работы(после включения питания) довольно долго ищут свой передатчик (Bind приемника) и синхронизируются с ним в течении нескольких секунд. Старые FM-приемники 35-40 мГц этой особенности не имели – ну упало напряжение и упало, выключился-включился когда оно поднялось и почти порядок… Сейчас как правило еще несколько секунд после провала-подъема напряжения приемник не в состоянии управлять РМ…. Ну вот и представьте себе – заход на посадку, интенсивная работа всеми рулями, выпуск шасси, выпуск закрылков – вот вам уже перегрузка BEC – все работает практически одновременно – почти все рулевые машинки, да еще и под большой нагрузкой, т.к. углы отклонения рулей могут быть значительно больше обычных. Просело напряжение питания и привет, – в последние 3-5 секунд, у самой земли, модель теряет управление (пилот в обмороке). Результат – дрова.
Вывод из этого длинного пассажа: нельзя использовать простейшую схему соединения элементов борта, если число РМ превышает 3-4 штуки.
Видео 1. Токопотребление РМ под нагрузкой..
Для пущей убедительности посмотрите ролик про рост тока потребления РМ под высокой нагрузкой. Или покопайтесь на сайтах rcgroup.com – там много сообщений о замерах токопотребления РМ в разных режимах работы. К сожалению такой информации в одном месте Вы нигде не найдете – производители скромно умалчивают о потреблении РМ под нагрузкой и вообще как правило о токе потребления не говорят, а совершенно зря. Я лично уже давно, прежде чем ставить борт в модель стараюсь сам измерерить возможные токи РМ в различных режимах. Именно это я рекомендую делать и Вам.
Это нетрудно – любой измеритель мощности(их много есть на Паркфлайере) включаете в цепь аккумулятора, отключаете мотор, фиксируете ток потребления борта в покое. Затем как можно больше и беспорядочнее двигаете все рулевые машинки и снова фиксируете токи – это будет ток потребления при работе РМ без нагрузки. Затем, закрепив машинки любым подходяшим способом, фиксируете среднее положение коромысел с помощью пружин или резинок под каким-нибудь натяжением иммитирующим вашу нагрузку и измерение повторяете снова интенсивно двигая все машинки – вот это и будет максимальный ток потребления сразу всеми РМ. Не забудьте также контролировать напряжение на выходе BEC отдельным вольтметром во время всех этих манипуляций – оно должно быть не ниже чем нужно приемнику для уверенной работы. Вот только путем таких измерений можно избежать проблем – т.к. никаких официальных данных по токопотреблению под нагрузкой нет.
Схема соединения элементов борта, учитывающая описанные выше проблемы, для случая шести РМ приеведена на Схеме 3 ниже.
Схема 3. Мощный борт. Раздельное питание разных групп РМ.
Здесь для питания второй группы РМ использован отдельный BEC не слишком большой мощности, сравнимый со встроенным BEC регулятора. Первые три машинки питаются по прежнему через приемник от BEС регулятора, и регулятор и приемник это выдержат. А для питания второй группы машинок используется независимы BEC с отдельной шиной питания Шина 2 (см схему). Кроме того, чтобы избежать прохождение большого тока через приемник проведена отдельная земляная шина ко всем РМ – это сушественно уменьшит нагрузку на внутренние проводники приемника. Детали соединений рассматривайте сами, все схемы кликабельны и их можно рассматривать в деталях. Простое пересечение шин на схеме – это не контакт – это просто прводники пересеклись без контакта. А там где проводники должны контактировать, там поставлена жирная круглая точка на пересечении. Естественно для такого соединения стандартные кабели уже не годятся, их так или иначе придется модернизировать. Как и какие разъемы для этого использовать – решайте сами – Вы на то и моделисты. Я не скоро возьмусь за модель с большим количеством РМ на борту скорее всего, потому мануала “Как это спаять” не ждите пока, у меня сейчас много другой работы, а от старых решений фоток не сохранилось.
Третья схема возможна во многих вариантах. Например в схеме с двумя и более моторами 2 и более регулятора, независимый BEC не нужен – вторую группу машинок можно запитать по Шине 2 от второго BEC-а, который в схеме 2 был незадействован, сделать можно по аналогично тому, как это сделано на схеме 3. Другой вариант: берем независимый BEС помощнее и все машинки запитываем только от него и вообще не используем BEC регулятора или от него запитывает один только приемник и тогда провалы на шине 2(питания РМ) нам будут не страшны – приемник их не увидит. В общем допустимых вариантов много.
Последнее замечание в этой статье: выбирая между линейным BEC и импульсным (трансформаторным) UBEC, я бы сделал выбор в пользу UBEC, помехи от него не так значительны как их часто расписывают и от них легко защититься, зато мощность он обычно имеет большую и не греется так как линейный. Это происходит потому, что в линейном BEС лишнее напряжение по сути переводится в тепло (прикиньте – ток 1-3 ампера и при батарее 14.8 вольта 10 вольт гасится на внутреннем сопротивлении самого BEC – т.е. он рассеивает тепловую мощность от 10 до 30 ватт!). А это между протчим далеко не лишняя энергия. Модель сможет летать существенно дольше при той же батарее, если использовать регуляторы с UBEC вместо BEC.
Да – еще одно(самое последнее) замечание, на первой схеме у меня показана аккумуляторная батарея от 1S до 4S, а я везде говорю про питание РМ и приемника от 4.8 до 6 вольт. Это не ошибка! На парклайере есть регуляторы 1S c импульсным, повышающим BEС, который имеет выходное напряжение порядка 5-6 вольт – я такой пользую если мне нужно 5-ти вольтовое питание от одной банки LiPo….
Здесь я сосредоточился только на мощностных аспектах схемы борта и оставил за бортом изложения например борьбу с помехами приемника, за рамками изложения остались так же вопросы подключения оборудования FPV и другого оборудования современных моделей, но нельзя объять необятное за один раз и сразу. Это все оставим для других авторов и другого случая…
Успехов Вам в конструировании бортов!
Николай П.
§
В простейшем случае все достаточно просто. Имеем:
- БК мотор
- БК регулятор со схемой BEC (Battery Eliminator Circuit)
- Батарею питания (от 1 до нескольких банок LiPo)
- Приемник на 4-8 каналов управления
- 1-2-3 рулевые машинки
Схема 1. Простейший борт.
Здесь все просто. Используя обычные кабели соединяем все как показано на схеме 1. Мотор присоединяется к трем соответствующим проводам регулятора (три толстых провода одного или разных цветов – как правило на них есть маркировка), три тонких цветных провода регулятора (черный,красный и желтый) включаются чаще всего в третий канал приемника. Черный провод это земляная шина и “-” питания, красный это ” ” питания приемника и рулевых машинок, а желтый провод (иногда белый) – это шина управления регулятором по каналу “газ”. В последнюю очередь, обычно перед запуском модели, подключаются провода идущие к батареи. Это два очень толстых провода, которые как правило расположены на регуляторе с двух сторон, по краям, вокруг тонкой, трехжильной шины питания-управления уходящей на приемник, черный идет к “-” батареи, а красный соответственно к ” ” силового разъема батареи.
Назначение регулятора в этой схеме двойное. С одной стороны он формирует диаграмму и напряжение питания мотора, а с другое преобразовывает высокое напряжение батареи 7.4-14.8 вольт с помощью схемы BEC (или UBEC) в напряжение питания приемника и РМ (4.8-6.0 В).
Каждая рулевая машинка, в свою очередь, присоединяется к соответствующему каналу приемника трехжильным проводом с помощью штатного разъема. Цвета отдельных проводов такие же как на шине управления регулятором: черный – земля и “-” питания РМ, красный ” ” питания, а желтый или черный это сигнальная шина управления РМ. Таким образом, ток питания снимется с BEC (UBEC) регулятора, проходит в приемник и там распределяется по рулевым машинкам.
В простейшей схеме очень важно не перегрузить BEC регулятора. Сумма максимальных токов потребления всех рулевых машинок не должна превышать максимально возможную токоотдачу схемы BEC. Как правило максимальная токоотдача схемы BEC в большинстве регуляторов имеет значение порядка 1.5-3 ампера. Ток потребления рулевых машинок в спокойном состоянии чаще всего небольшой (20-50 mА), но очень сильно возрастает во время работы под нагрузкой и может достигать в режиме удержания (когда машика уже не может повернуть рычаг, но еще в состоянии его удерживать в неподвижном положении) величины порядка 1.0-1.5 ампера. Таким образом суммарный ток потребления РМ в наихудшем случае иногда может достигнуть величины в 3 ампера и более. Однако при рассмотрении этой простейшей схемы мы будем считать, что с током потребления РМ у нас все в порядке. Обычно в всего случае 3-4 РМ мощности схемы BEC почти всегда достаточно для питания всех РМ в любых режимах при обычных примениях. Заметим только то, что весь этот ток идет от BEC через приемник и только потом поступает в РМ-ы. Не очень хорошо, но для простейшей схемы более-менее допустимо. Пока просто запомним этот факт.
Требования к аккумуляторной батарее очень простые: она должна обеспечивать токоотдачу равную или больше максимального тока потребления мотора плюс максимально возможный суммарный ток потребления всех РМ и приемника. От емкости аккумуляторной батареи будет зависеть время полета вашей модели. Время полета в часах можно вычислить так: берем емкость батареи в мАч и делим на средний ток потребления всего борта (ток приемника средний ток всех РМ средний ток мотора). Результатом будет количество часов полета в часах… К примеру батарея иммет емкость 2000 мАч, ток потребления мотора – 10 ампер или 10000мА, ток потребления приемника ~ 20 мА, а средний ток потребления каждой РМ – 50 мАч. Сумма токов будет 10170 мА (т.е. в основном это ток мотора). Делим 2000 мАч на 10170: 2000/10170 = 0.197 часа или около 12 минут полета на среднем газе. На максимальном газу время полета естественно сократится.
Отдельный вариант схемы 1, для случая коллекторного мотора мы рассматривать не будем, т.к. он совершенно тривиален. Отличие только в том, что используется регулятор именно для коллекторного мотора, а не регулятор для БК-мотора. Он отличается от нашего случая тем, что имеет только два провода идушие к коллекторному мотору, который также имеет только два провода питания. Все остальное в Схеме 1 остается точно таким же.
Вот пожалуй и все что нужно знать для начала в случае простейшего борта на Схеме 1.
Один из наиболее часто возникающих вопросов у новичков: а как подключать два или больше моторов? В случае подключения одинаковых коллекторных моторов для многомоторной модели все достаточно тривиально: моторы просто подключаются параллельно к двум проводам регулятора, предназначенных для питания мотора. Если надо получить вращение мотров в разные стороны, то на одном из них изменяется полярность питания(т.е. меняются местами два провода) и все. Самое главное, что нужно не забывать, это то, что максимальный ток регулятора отдаваемый моторам должен быть не меньше суммы максимальных токов потребления всех моторов, а лучше больше хотя бы с небольшим запасом. В идеале токоодача регулятора должна быть больше чем N*Iост, где N-количество моторов, а Iост – это ток потребления мотора в режиме остановки(когда его вал не может провернуться из-за нагрузки – к примеру его заклинило, или мы сами не даем провернуться удерживая винт модели).
Для нескольких БК-моторов все становится существенно сложнее. Каждый БК-мотор должен иметь свой регулятор оборотов. Дело тут в том, что Регулятор не только изменяет величину напряжения и тока протекающего через мотор, но и еще формирует вполне определенную диаграмму включения-выключения обмоток БК-мотора, отслеживая положение ротора мотора по ЭДС самоиндукции, возникающей при вращении ротора. Соединять БК-моторы просто впараллель категорически не рекомендуется и даже просто запрещается.
Не верьте никому, кто Вам скажет: а вот я соединил и они у меня вертятся хорошо. Да – без нагрузки обычно крутиться будут, т.к. повторяемость параметров моторов достаточно высокая и они на холостом ходу без нагрузки, как правило, будут оба крутиться синхронно. Но как только появится нагрузка – так все и закончится. Нагрузка на одном моторе неизбежно будет отличаться от нагрузки на другом – причин для этого очень много: чуть разные винты, разные режимы обдува винтов при повороте модели, в конце-концов разное количество грязи, которое попало в подшипники – да мало ли что… В итоге произойдет рассинхронизация моторов, импульсы ЭДС самоиндукции и ее диаграммы будут разными, они просуммируются, и не будут соответствовать ничему. Это запутает регулятор и диаграмма импульсов от регулятора к моторам станет неправильной, что приведет в конце-концов к остановке одного или обоих моторов и к их перегреву.
Правильная схема подключения 2-х БК-моторов представлена ниже на Схеме 2.
Схема 2. Простейший борт с двумя БК моторами.
На Схеме 2 все почти так же как на схеме 1, но регуляторов два и два БК-мотора. Раширение схемы до тре-четырех моторов тривиально просто станет больше моторов и регуляторов. Что тут важно заметить? А то, что приемник и рулевые машинки питаются только от регулятора 1. На втором регуляторе на т.н. Y-кабеле красный провод перерезан (не присоединяется к приемнику) и питание приемника и РМ идет только от BEC Регулятора 1. Это важно запомнить и тщательно соблюдать в такой схеме. Нельзя соединять вместе красные провода разных BEC-ов. Да особенно и не нужно в нашем случае. Вариант их объединения через диоды Шоттки рассматривать тут не будем из-за его весьма низкой полезности.
Все остальное на Схеме 2 точно так же как на Схеме 1 и все сказанное про схему 1, также будет справедливо для схемы 2.
Теперь отдельно рассмотрим ток потребления РМ. Дело в том, что ток потребления рулевой машинки, в зависимости от нагрузки способен изменяться в десятки и сотни раз. В спокойном состоянии она потребляет от 20 мА до 50 мА, при интенсивном движении ее ток вырастает до 200-300-500 мА, в зависимости от ее конструкции, а при очень большой нагрузке может достигать величины в 1.0-1.5 Ампера. Все это было бы ничего – экстремальные нагрузки явление редкое, но вот в сложных случаях – количество РМ на модели растет и может достигать 10-12 и более штук.
Соответственно максимальный суммарный ток потребления РМ становится порядка тока потребления двигателя. Причем рамер РМ имеет очень малое значение. Совсем не факт что под критической нагрузкой мини(микро) РМ потребляет меньше чем полноразмерная машинка. Она может потреблять даже больше, чем большая РМ, – из-за меньшей эффективности двигателя. Вот теперь вспомните как проходит ток в простейшей схеме…. Вспомнили? Да – весь суммарный ток потребления от BEC идет прямо на разъем приемника, а внутри приемника расходится по кабелям РМ… Что будет с вашим приемником в критическом случае, когда к примеру 10-15 ампер пройдут через разъем канала газа? Приемник перегреется как минимум, а как максимум просто погорит со взрывом и мгновенным испарением печатных проводников на плате. Слава богу почти никакой BEC такой ток выдать не способен. Но тут другая засада.
BEC такой ток дать не может но, перегревается и напряжение на его выходе резко падает до тех пор, пока нагрузка на РМ не упадет и не снизится их ток потребления. Чем черевато падение напряжения питания борта? А тем, что приемник это почуствует и перезапустится… Современные приемники на 2.4 Ггц вначале работы(после включения питания) довольно долго ищут свой передатчик (Bind приемника) и синхронизируются с ним в течении нескольких секунд. Старые FM-приемники 35-40 мГц этой особенности не имели – ну упало напряжение и упало, выключился-включился когда оно поднялось и почти порядок… Сейчас как правило еще несколько секунд после провала-подъема напряжения приемник не в состоянии управлять РМ…. Ну вот и представьте себе – заход на посадку, интенсивная работа всеми рулями, выпуск шасси, выпуск закрылков – вот вам уже перегрузка BEC – все работает практически одновременно – почти все рулевые машинки, да еще и под большой нагрузкой, т.к. углы отклонения рулей могут быть значительно больше обычных. Просело напряжение питания и привет, – в последние 3-5 секунд, у самой земли, модель теряет управление (пилот в обмороке). Результат – дрова.
Вывод из этого длинного пассажа: нельзя использовать простейшую схему соединения элементов борта, если число РМ превышает 3-4 штуки.
Видео 1. Токопотребление РМ под нагрузкой..
Для пущей убедительности посмотрите ролик про рост тока потребления РМ под высокой нагрузкой. Или покопайтесь на сайтах rcgroup.com – там много сообщений о замерах токопотребления РМ в разных режимах работы. К сожалению такой информации в одном месте Вы нигде не найдете – производители скромно умалчивают о потреблении РМ под нагрузкой и вообще как правило о токе потребления не говорят, а совершенно зря. Я лично уже давно, прежде чем ставить борт в модель стараюсь сам измерерить возможные токи РМ в различных режимах. Именно это я рекомендую делать и Вам.
Это нетрудно – любой измеритель мощности(их много есть на Паркфлайере) включаете в цепь аккумулятора, отключаете мотор, фиксируете ток потребления борта в покое. Затем как можно больше и беспорядочнее двигаете все рулевые машинки и снова фиксируете токи – это будет ток потребления при работе РМ без нагрузки. Затем, закрепив машинки любым подходяшим способом, фиксируете среднее положение коромысел с помощью пружин или резинок под каким-нибудь натяжением иммитирующим вашу нагрузку и измерение повторяете снова интенсивно двигая все машинки – вот это и будет максимальный ток потребления сразу всеми РМ. Не забудьте также контролировать напряжение на выходе BEC отдельным вольтметром во время всех этих манипуляций – оно должно быть не ниже чем нужно приемнику для уверенной работы. Вот только путем таких измерений можно избежать проблем – т.к. никаких официальных данных по токопотреблению под нагрузкой нет.
Схема соединения элементов борта, учитывающая описанные выше проблемы, для случая шести РМ приеведена на Схеме 3 ниже.
Схема 3. Мощный борт. Раздельное питание разных групп РМ.
Здесь для питания второй группы РМ использован отдельный BEC не слишком большой мощности, сравнимый со встроенным BEC регулятора. Первые три машинки питаются по прежнему через приемник от BEС регулятора, и регулятор и приемник это выдержат. А для питания второй группы машинок используется независимы BEC с отдельной шиной питания Шина 2 (см схему). Кроме того, чтобы избежать прохождение большого тока через приемник проведена отдельная земляная шина ко всем РМ – это сушественно уменьшит нагрузку на внутренние проводники приемника. Детали соединений рассматривайте сами, все схемы кликабельны и их можно рассматривать в деталях. Простое пересечение шин на схеме – это не контакт – это просто прводники пересеклись без контакта. А там где проводники должны контактировать, там поставлена жирная круглая точка на пересечении. Естественно для такого соединения стандартные кабели уже не годятся, их так или иначе придется модернизировать. Как и какие разъемы для этого использовать – решайте сами – Вы на то и моделисты. Я не скоро возьмусь за модель с большим количеством РМ на борту скорее всего, потому мануала “Как это спаять” не ждите пока, у меня сейчас много другой работы, а от старых решений фоток не сохранилось.
Третья схема возможна во многих вариантах. Например в схеме с двумя и более моторами 2 и более регулятора, независимый BEC не нужен – вторую группу машинок можно запитать по Шине 2 от второго BEC-а, который в схеме 2 был незадействован, сделать можно по аналогично тому, как это сделано на схеме 3. Другой вариант: берем независимый BEС помощнее и все машинки запитываем только от него и вообще не используем BEC регулятора или от него запитывает один только приемник и тогда провалы на шине 2(питания РМ) нам будут не страшны – приемник их не увидит. В общем допустимых вариантов много.
Последнее замечание в этой статье: выбирая между линейным BEC и импульсным (трансформаторным) UBEC, я бы сделал выбор в пользу UBEC, помехи от него не так значительны как их часто расписывают и от них легко защититься, зато мощность он обычно имеет большую и не греется так как линейный. Это происходит потому, что в линейном BEС лишнее напряжение по сути переводится в тепло (прикиньте – ток 1-3 ампера и при батарее 14.8 вольта 10 вольт гасится на внутреннем сопротивлении самого BEC – т.е. он рассеивает тепловую мощность от 10 до 30 ватт!). А это между протчим далеко не лишняя энергия. Модель сможет летать существенно дольше при той же батарее, если использовать регуляторы с UBEC вместо BEC.
Да – еще одно(самое последнее) замечание, на первой схеме у меня показана аккумуляторная батарея от 1S до 4S, а я везде говорю про питание РМ и приемника от 4.8 до 6 вольт. Это не ошибка! На парклайере есть регуляторы 1S c импульсным, повышающим BEС, который имеет выходное напряжение порядка 5-6 вольт – я такой пользую если мне нужно 5-ти вольтовое питание от одной банки LiPo….
Здесь я сосредоточился только на мощностных аспектах схемы борта и оставил за бортом изложения например борьбу с помехами приемника, за рамками изложения остались так же вопросы подключения оборудования FPV и другого оборудования современных моделей, но нельзя объять необятное за один раз и сразу. Это все оставим для других авторов и другого случая…
Успехов Вам в конструировании бортов!
Николай П.
Самолет может сделать каждый! | моделист-конструктор
Решив однажды построить самолет, самодельщик сталкивается с рядом вопросов, и от ответа на них зависит исход всего дела. Мне кажется, что самолет может сделать каждый грамотный человек, если выполнит три условия.
Во-первых, необходимо заручиться поддержкой и пониманием своей задумки у родных и близких. Создание самолета отнимает все свободное время, и очень важно, чтобы семья не была против. Еще лучще – сделать это общим делом, зажечь своей идеей самых близких людей. По данным Американской ассоциации экспериментальной авиации, около 70% недостроя случается «из-за жен». Проблемы в семье, связанные с отсутствием взаимного внимания во время строительства, в большинстве случаев приводят к тому, что дело не доводится до конца.
Во-вторых, нужно выработать в себе силу воли. Это обеспечит превосходство разума над чувствами. Создание собственного самолета – процесс весьма трудоемкий. Огромный объем работ может заставить усомниться в правильности выбранного пути, расстроиться из-за ошибок или сложностей. Приготовьтесь к тому, что будут взлеты и падения. Нужно научиться бороться с самим собой: «Не хочется, а надо!». И каждый день, несмотря ни на что, идти к своей цели!
В-третьих, важно найти подходящий проект. В наше время появилось много готовых разработок самолетов для самостоятельной постройки, и из всего этого многообразия требуется выбрать один, наиболее пригодный для себя в соответствии с имеющимися финансовыми, технологическими и эксплуатационными возможностями.
Для правильной оценки всего этого нужен опыт, конечно, и в предлагаемом материале мне хочется поделиться собственными соображениями на этот счет.
ПУТЬ В НЕБО
В детстве я мечтал стать летчиком. Это желание даже стало предметом своеобразного родительского «шантажа»: «Хочешь быть летчиком – должен хорошо учиться». Отец выписывал тогда журнал «Моделист-конструктор», в котором я с восхищением читал репортажи со слетов СЛА 1980-х годов, и думал: «Неужели возможно самому построить самолет?». Отец был военным, поэтому, мотаясь по разным гарнизонам, возможностей ходить в кружки или СЮТ у меня не было. А в средних классах возникли проблемы со зрением, и с мечтой пришлось расстаться.
После школы я неожиданно для всех поступил в колледж искусств и стал… саксофонистом. Затем окончил институт искусств, чему поспособствовала работа в созданной мной мастерской художественной керамики. Все шло хорошо и размеренно, пока я случайно не увидел в магазине игрушек авиамодель. Вот тут все и началось! Неосуществленные мечты и воспоминания захлестнули со страшной силой.
Начал я со сборки пластиковых масштабных моделей самолетов, попутно изучал историю авиации. Стал «летать» в разных компьютерных симуляторах, что дало мне представление о том, как управлять самолетом. Затем перешел к самостоятельной постройке радиоуправляемых летающих моделей, а это уже основы аэродинамики и конструирования. В это время я познакомился с местным самодельщиком, у которого был самолет ХАИ 29 «Коршун». На этом самолете я впервые поднялся в небо. Интересно, что мой первый в жизни полет был и первым самостоятельным! Ну а потом: «крылья выросли», а своего самолета все нет…
Поразмыслив, я пришел к выводу, что самый доступный для меня способ летать – освоить дельтаплан. Дельтаклуб, который мне приглянулся, оказался в городе Жуковском. От Смоленска, где я живу, это около 500 км. Но как говорится, кто хочет – тот сможет. Вот это полет, вот это восторг! Среди всех летательных аппаратов, придуманных человеком, дельтаплан наиболее полно передает полет птицы! Однако вначале нужен разбег с горы или буксировка аппарата, если дело происходит в равнинной местности. Организация полетов – самое сложное в дельтапланеризме.

Продолжая летать на дельтаплане в Смоленске, я начал задумываться о том, чтобы сделать собственный самолет. Вначале был «деревянный» проект. Но оказалось, что в нашей стране авиационную фанеру давно не производят, а та, что еще встречается – баснословно дорогая. Рассматривал также аппарат из стеклопластика. Тут тоже возникла неразрешимая проблема – однонаправленная стеклоткань. А о цельнометаллическом варианте даже не мечтал из-за цены на материалы и оснастку. Да и не хотелось обрастать приспособлениями и станками из-за одного самолета. В итоге сделал для себя ряд выводов. Самых важных из них три: 1 – необходима простая, доступная и надежная технология: 2 – следует использовать самые доступные материалы; 3 – требуется распространенный и надежный мотор.
Таким образом, я для себя решил, что мой самодельный самолет должен быть только одноместным из экономических и моральных соображений. Он намного дешевле двухместного. К тому же, я принципиально против самодельных двухместных самолетов, потому что считаю так: сам построил – сам и летай. А если хочешь «поделиться эмоциями», покупай заводскую модель, не надо делать людей заложниками своих амбиций.
Важнейший параметр сверхлегкого самолета – нагрузка на крыло. Она должна лежать в пределах 20 – 27 кг. При меньшем значении самолет будет «хрупкой игрушкой в руках ветра». При большем – придется использовать более мощный мотор. А это то, что вызовет необходимость усиления конструкции, что, в свою очередь, приведет к увеличению веса и потянет за собой применение специальных технологий и материалов – в результате самолет получится тяжелый и очень дорогой.
Важно также определиться с эксплуатационными задачами. В основном самодельщики строят самолеты «для души», просто чтобы полетел и все. Однако всегда должна быть перспектива! Когда я спрашивал людей, которые хотели сделать самолет, для чего им это нужно, то чаще всего ответ был таким: «Пролететь по кругу и все». Бывшие пилоты добавляли: «Ну, отвести душу, вспомнить…». Но такие полеты очень быстро наскучат! Должна быть какая-то более значимая задача.
Например, сделать свой самолет для путешествий. Ведь для «пролететь по кругу» достаточно парамотора (и не надо ничего изобретать!). Или самолет, пригодный для эксплуатации в разных климатических условиях. Для зимы и лета, способный взлетать с грунта, асфальта или с воды (и приземляться туда же). А может, создать самолет для совершенствования навыков пилотирования?
Обычно энтузиасты строят самолеты с малой нагрузкой на крыло, для обеспечения невысокой взлетно-посадочной скорости и хорошей управляемости. На таких машинах относительно легко научиться летать. Однако выбор подходящей погоды становится чрезвычайно актуальным! Все возможности летательного аппарата используются практически в первых же полетах, развития пилота не происходит. Или существует другая крайность: самолет «Арго», пользующийся большой популярностью у самодеятельных авиаконструкторов. Он довольно строг к пилоту, имеет приличную скорость взлета-посадки и ярко выраженный экранный эффект. Им может управлять человек с опытом. И вот, строит-строит самодельщик в течение нескольких лет такой самолет, а потом, в первых же пробежках (иногда они заканчиваются и случайными взлетами) – бац, и плод всех долгих трудов превращается в груду «дров». Поэтому любителю нужен такой летательный аппарат, чтобы без серьезной подготовки позволил бы и первый вылет совершить, а дальше расти как пилоту: садиться на неподготовленные или ограниченные площадки, научиться выполнять виражи 2G, «боевой разворот» и «ленивые восьмерки». Поэтому перспектива, в моем понимании, это и путешествия, и эксплуатация зимой и летом, и с грунта, и с воды, и развитие своих навыков. Всего этого можно достичь и в СЛА, выбирая подходящую погоду и имея подходящую машину.
Забегая вперед, скажу, что наш самолет отвечает всем этим требованиям. На нем можно научиться летать (но я все равно советую делать первые шаги с опытным инструктором), путешествовать – летом, используя колеса или поплавки, зимой – лыжи, участвовать в праздниках, фестивалях (летать с дымами, с лентами, «наперегонки» с автомобилем). Я даже рассматриваю вариант использования нашего самолета для буксировки дельтаплана. Вот это и есть, в моем понимании, полеты «для души», а не вокруг «песочницы» (на сленге авиаторов «песочница» – это ВПП).
Самолеты, относящиеся к категории СЛА, в основном эксплуатируются вне аэродромов. Также у них всегда существует вероятность отказа мотора, что приведет к необходимости совершить посадку вне подготовленной площадки. Поэтому логично выбрать схему высокоплана с достаточно малой посадочной скоростью, которая определяется нагрузкой на крыло. Выбор схемы шасси с хвостовой опорой, несмотря на ее недостатки, тоже логичен: малый вес, малое аэродинамическое сопротивление, простота конструкции. Все чемпионские пилотажные машины – с хвостовой опорой, буш-пилоты на Аляске также предпочитают такую схему.


Накануне Первой мировой войны в мире не существовало специальной авиационной отрасли промышленности. При создании самолетов конструкторы пользовались наработками из смежных областей машиностроения. Бурное развитие авиации во время войны отбросило все сомнительные и неперспективные технологии, методы и аэродинамические схемы. К 1918 году сформировалась наиболее компромиссная конструкция, которая и стала классической. А к концу 1920-х годов самолеты со стальной сварной ферменной рамой фюзеляжа и деревянным крылом с полотняной обшивкой достигли своего совершенства. Стремления летать выше, быстрее и перевозить больше груза потребовало новых материалов и технологий. Но очевидно, что они лишь удорожают самодельный самолет. Как я уже заметил выше, для того, чтобы построить надежный, хорошо летающий аппарат можно и нужно использовать самые доступные материалы и простые технологии, отработанные еще в начале прошлого века.
НЕСТАРЕЮЩАЯ КЛАССИКА
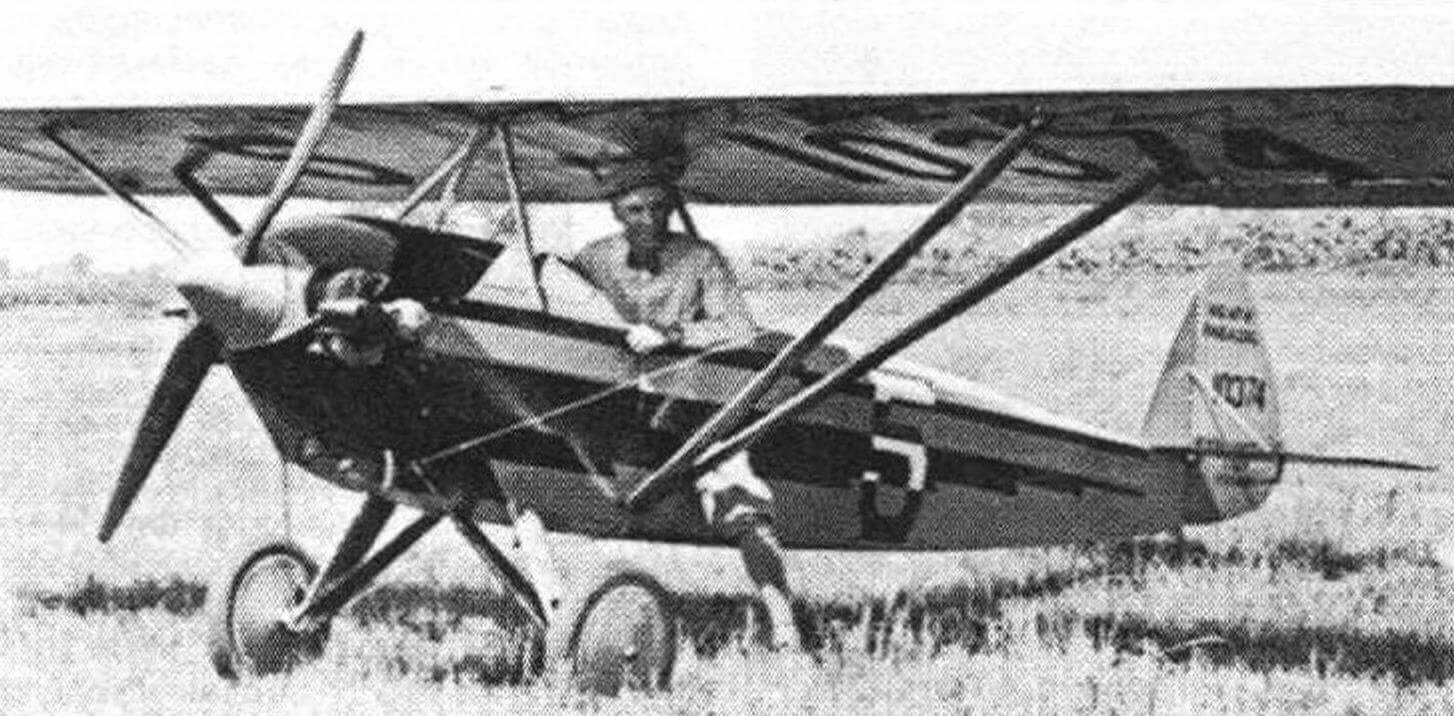
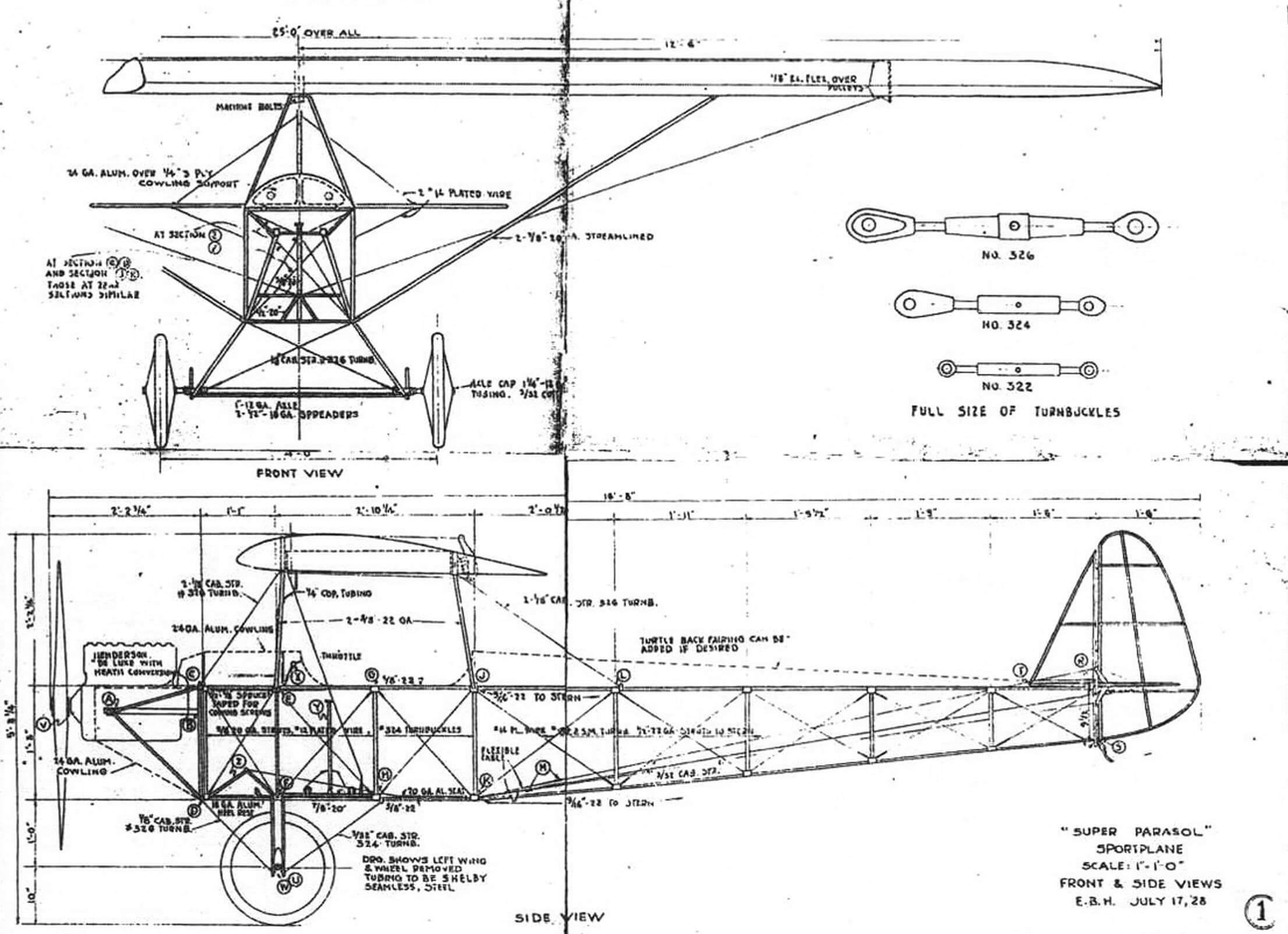
Пересмотрев все доступные проекты для самостоятельной постройки, я открыл для себя творчество Эдварда Хита и его легендарный «Хит Супер Парасоль». Как и следовало ожидать, все уже придумано до нас! Именно этот самолет удовлетворял всем моим требованиям и задачам в полной мере.
Heath Super Parasol – это очень известный в США самолет пионера сверхлегкой авиации, пилота, конструктора и бизнесмена Эдварда Хита. Пик его технического творчества пришелся на середину-конец 1920-х годов. Авиация всегда была делом состоятельных людей, но Эдд Хит всю жизнь мечтал создать ЛА, доступный простому среднему американцу. В 1918 году первый проект такого самолета был готов. Это был биплан с размахом крыльев 6 метров, с двигателем от мотоцикла мощностью 15 л.с. Вес пустой машины, которую Эдд назвал «Перо», составил 122 кг. Однако окончание войны сделало проект невыгодным: на рынок хлынули военные самолеты по цене ниже себестоимости. Тогда Хит основал фирму по продаже запчастей и материалов, где любой энтузиаст мог купить «все и в одном месте!». Но идея доступного самолета не оставляла его. Хит начал проектировать и строить самолеты для участия в популярных в то время воздушных гонках. В 1926 году на модели «Томбой» он стал победителем Национальных воздушных гонок в Филадельфии. На 2500 долларов, полученных в качестве приза, в том же году Хит с инженером Клером Линстедом создали первую версию ставшего в последствии знаменитым «Хит Парасоль».


Через год появился следующий «Парасоль», и на соревнованиях в Спокане в классе легких спортивных самолетов Хит выиграл на нем приз в 1000 долларов. С этого момента пришло признание! Эдд стал продвигать лозунг «Создайте свой собственный самолет». Именно он первым придумал продавать самолет в виде «кита» (набора). Можно было приобрести готовый аппарат за 695 долларов («Форд-Т», кстати, стоил тогда около 400 долларов), или купить его по частям для самостоятельной сборки, или заказать только чертежи за 5 долларов. Надо отметить, что это был лицензированный самолет, и налетав на нем 200 часов, любой желающий мог получить лицензию коммерческого пилота. Были проданы сотни комплектов чертежей. десятки наборов и около 80 готовых самолетов. Множество простых людей стали пилотами благодаря Эдварду Хиту и его «Супер Парасолю»!
Эдвард Хит впервые предложил вариант расчалочного стального фюзеляжа без использования сварки, что очень облегчало постройку самолета в домашних условиях и не сказалось на прочности. Однако в конце 1929 года Хит перешел на полностью сварную раму. Были доработаны капоты мотора, появился кок. Шасси вместо цельной оси колес получило разрезную ось. Параллельные подкосы крыла заменены на V-образные. Появилась дверь, и было изменено положение топливного бака. Модернизированный вариант самолета стал называться «Хит Супер Парасоль, модель V».
Именно его в 2020 году и построил наш небольшой коллектив единомышленников. На слете СПА в Орловке в том же году (см. «М-К» № 8-2020) эта работа отмечена призовым местом. Следует заметить, что в России «Хит Супер Парасоль» был построен впервые. Он создавался нами в Смоленске в течение двух с половиной лет. Мы хотели сделать маленький легкий самолет, максимально доступный по материалам (бюджет до 200 000 рублей) и технологиям, чтобы любой желающий мог повторить его, ведь Heath Super Parasol – самолет, который может построить каждый!


ИЗ ДОСЬЕ «М-К»
Экспериментальный самолет-тандем А-8 – пример легкого самодельного летательного аппарата из стеклопластика, созданный но мотивам «Квики» Берта Рутана в Куйбышевском авиационном институте в 1984 году. Впервые продемонстрирован авиационной общественности в Коктебеле на СЛА-85 (см. «М-К» № 3-1986). Автор конструкции Юрий Яковлев (в те годы студент КуАИ).
Технические характеристики: размах крыла – 5,08 м; длина самолета – 5,2 м; площадь крыла – 4,92 м2; взлетная масса – 223 кг; мощность двигателя – 30 л.с.; диаметр винта – 1,1 м; шаг винта – 0,7 м; обороты винта – 5000 об/мин; статическая тяга винта – 65 кгс; удельная нагрузка на крыло – 45 кгс/м2; удельная нагрузка на мощность – 7,5 кгс/л.с.; максимальная скорость – 200 км/ч; скорость сваливания – 75 км/ч; скороподъемность у земли – 5 м/с; максимальные эксплуатационные перегрузки – 6

ИЗ ДОСЬЕ «М-К»
Сверхлегкий одноместный учебно-тренировочный самолет «Арго-02» – самодельный ЛА с деревянным каркасом и полотняной обшивкой крыла. Построен тверскими авиаторами-любителями Евгением Игнатьевым. Юрием Гулаковым и Александром Абрамовым в 1987 году. Успешно летал на СЛА-87, СЛА-89, получил первую премию на региональном смотре-конкурсе в Ярославле (см. «М-К» №3-1990).
Технические характеристики: размах крыла – 6.3 м; длина самолета – 4,55 м; площадь крыла – 6,3 м2; взлетная масса – 225 кг; мощность двигателя – 28 л.с.; диаметр винта – 1,48 м; шаг винта – 0,95 м; обороты винта – 2750 об/мин; статическая тяга винта – 95 кгс; удельная нагрузка на крыло – 37,3 кге/м2; удельная нагрузка на мощность – 8,39 кгс/л.с.; максимальная скорость -130 км/ч; скорость сваливания – 72 км/ч; скороподъемность у земли – 2 м/с; максимальные эксплуатационные перегрузки – н.д.
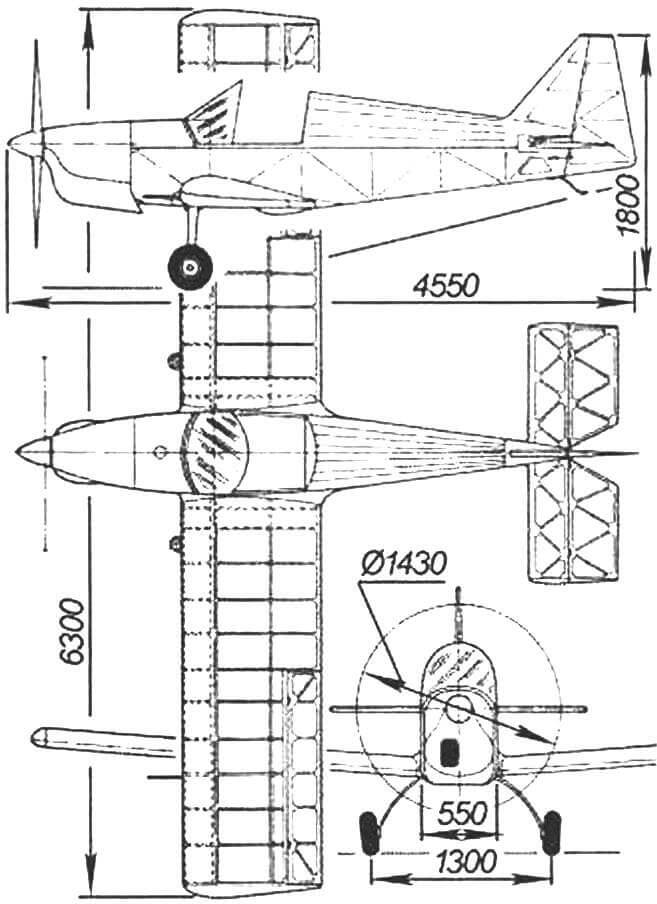
Основные ТТХ самолета «Хит Супер Парасоль», созданного в Смоленске
Размах крыла, м 7,62
Длина, м 5
Высота, м 1,73
Площадь крыла, м2 10
Макс, скорость, км/ч 90
Посадочная скорость, км/ч 45
Двигатель бензиновый,
четырехтактный, карбюраторный.
воздушного охлаждения Lifan 2V78-F2A. 24 л.с при 3600 об/мин.
Расход топлива (Аи-92), л/ч 5
Дальность полета, км ~ 270
Максимальный взлетный вес. кг 230
Максимальная нагрузка, кг 105
Расчетная перегрузка 10
Кол-во мест 1
Бюджет постройки ~ $3000
Время постройки, чел/ч ~ 1500
Андрей ЯКОВЛЕВ для сайта radiocopter.ru, г. Смоленск


