

- Аппаратура радиоуправления для моделей: приемники (часть ii)
- Детали и монтаж приемника
- Детали передатчика
- Как и чем управлять
- Многоканальное управление
- Налаживание передатчика
- Настройка приемника
- Передающая часть
- Программная реализация
- Пуск!
- Реализация в железе
- Список радиоэлементов
- Схема передатчика
- Схема приемника
Аппаратура радиоуправления для моделей: приемники (часть ii)
Сам приемник выполняется на одной печатной плате, к которой крепится антенна. Для подключения регуляторов хода и сервомашинок у приемника имеются разъемы, а также наличествует «гнездо» для установки кварцевого резонатора.
Если после столкновения приемник не работает, в первую очередь следует сменить именно его – в ряде случаев замена помогает восстановить работу аппаратуры.
Особенно заметен их «фон» при установке мощных устройств и длинных соединительных кабелей. Для нейтрализации помех на кабель одевают ферритовые кольца (располагают вблизи приемника) или же используют фирменные кабели, уже оснащенные ферритовыми кольцами. Радикальным методом устранения помех от сервоприводов считается оснащение приемника и серв отдельными аккумуляторами, что не всегда возможно.
Создание качественной современной аппаратуры своими руками – занятие непростое и не дешевое. В подавляющем числе случаев это просто не оправдано, ни по затратам, ни по конечному результату. Для тех же, кто причисляет себя к фанатам радиолюбительства и уверен в своих силах, дадим совет: при изготовлении комплекта аппаратуры очень тщательно проверяйте его работу, особенно передатчика. Неправильно работающий передатчик своими излучениями может сбивать с курса чужие модели и стать причиной их крушений.
Детали и монтаж приемника
Монтаж приемника выполняют печатным способом на плате из фольгированного стеклотекстолита толщиной 1,5 мм и размерами 100×65 мм. В приемнике используются резисторы и конденсаторы тех же типов, что и в передатчике.
Катушка контура сверхрегенератора L1 имеет 8 витков провода ПЭЛШО 0,35, намотанных виток к витку на полистироловом каркасе 06,5 мм, с подстроечным ферритовым сердечником марки 100НН диаметром 2,7 мм и длиной 8 мм. Дроссели имеют индуктивность: L2 — 8 мкГн, a L3 — 0,07…0,1 мкГн.
Электромагнитное реле К1 типа РЭС-6 с обмоткой сопротивлением 200 Ом.
Детали передатчика
В передатчике использованы транзисторы с коэффициентом передачи тока базы Ь2іэ не менее 60. Резисторы типа МЛТ-0,125, конденсаторы — К10-7, КМ-6.
Согласующая антенная катушка L1 имеет 12 витков ПЭВ-1 0,4 и намотана на унифицированном каркасе от карманного приемника с подстроечным ферритовым сердечником марки 100НН диаметром 2,8 мм.
Катушка L2 бескаркасная и содержат 16 витков провода ПЭВ-1 0,8 намотанных на оправке 010 мм. В качестве кнопки управления можно использовать микропереключатель типа МП-7.
Детали передатчика монтируют на печатной плате из фольгированного стеклотекстолита. Антенна передатчика представляет собой отрезок стальной упругой проволоки 01…2 мм и длиной около 60 см, которая подключается прямо к гнезду XI, расположенному на печатной плате.
Все детали передатчика должны быть заключены в алюминиевый корпус. На передней панели корпуса располагается кнопка управления. В месте прохождения антенны через стенку корпуса к гнезду XI должен быть установлен пластмассовый изолятор, чтобы предотвратить касание антенны корпуса.
Как и чем управлять
Нормальные люди берут приемник, втыкают в него сервомашинки, регулятор скорости, двигают рычажки на пульте и радуются жизни не задаваясь принципами работы и не углубляясь в подробности. В нашем случае такое не пройдет. Первой задачей стало узнать каким макаром управляются сервомашинки.
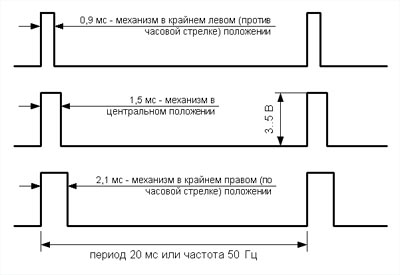
Итак, если мы хотим установить привод в крайнее левое положение нужно слать импульсы длительностью 0,9мс с интервалом 20мс, если в крайнее правое — длительность 2,1мс, интервал тот же, ну со средними положениями аналогично. Как оказалось, регуляторы скорости управляются аналогично. Те, кто в теме скажут что это
, который реализовать на любом микроконтроллере — плевое дело. Вот и я так решил, купил в местном магазине сервомашинку и склепал на макетке для нее так называемый сервотестер на ATtiny13. И тут оказалось, что ШИМ не совсем простой, а с подводными камнями.
Как видно из вышеприведенной диаграммы, скважность (отношение длительности импульса к длительности периода) от 5% до 10% (в дальнейшем я за крайние положения принимаю импульсы длительностью 1,0мс и 2,0мс) для 256-значного ШИМ счетчика ATtiny13 это соответствует значениям от 25 до 50.
Но это при условии, что на заполнение счетчика уйдет 20мс, а на деле так не получится и для частоты 9,6МГц и предделителя 1024 нужно ограничить счетчик значением 187(ТОР), в таком случае у нас получится частота 50,134Гц. В большинстве (если не во всех) сервомашинок нету точного генератора опорной частоты и поэтому частота управляющего сигнала может немного плавать.
Если оставить ТОР счетчика 255, то частота управляющего сигнала будет 36,76Гц — на некоторых приводах оно будет работать (возможно с глюками), но далеко не на всех. Итак, теперь у нас 187-значный счетчик, для него 5-10% соответствуют значениям от 10 до 20 — всего 10 значений, немного дискретно получится. Если думаете поиграть с тактовой частотой и предделителем ниже привожу сравнительную табличку для 8-битного ШИМа:
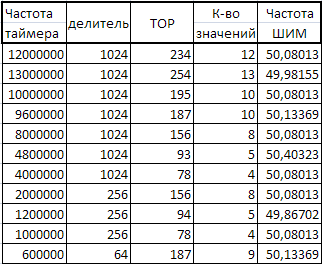

Я не думаю, что для китайской сервомашинки есть существенная разница в 600 и 1200 значений, поэтому вопрос с точностью позиционирования можно считать закрытым.
Многоканальное управление
С одной сервомашинкой разобрались, но для самолета их нужно минимум три и еще регулятор скорости. Решение «в лоб» — взять микроконтроллер с четырьмя каналами 16-битного ШИМ, но такой контроллер будет стоять дорого и, скорее всего, займет много места на плате.
Второй вариант — запилить программный ШИМ, но занимать процессорное время — это тоже не вариант. Если снова посмотреть на диаграммы сигнала, то 80% времени он не несет никакой информации, поэтому рациональнее было бы ШИМом задавать только сам импульс 1-2мс.
Почему скважность изменяется в таких узких пределах, ведь проще было бы и формировать и считывать импульсы со скважностью хотя бы 10-90%? Зачем нужен тот неинформативный кусок сигнала занимающий 80% времени? Я заподозрил, что, возможно, эти 80% могут занимать импульсы для других исполнительных механизмов, а потом этот сигнал разделяется на несколько разных.
То есть, в периоде длительностью 20мс могут уместится 10 импульсов длительностью 1-2мс, затем этот сигнал каким-то демультиплексором разделяется на 10 различных с длительностью периода как раз 20мс. Сказано — сделано, нарисовал в PROTEUS такую схемку:
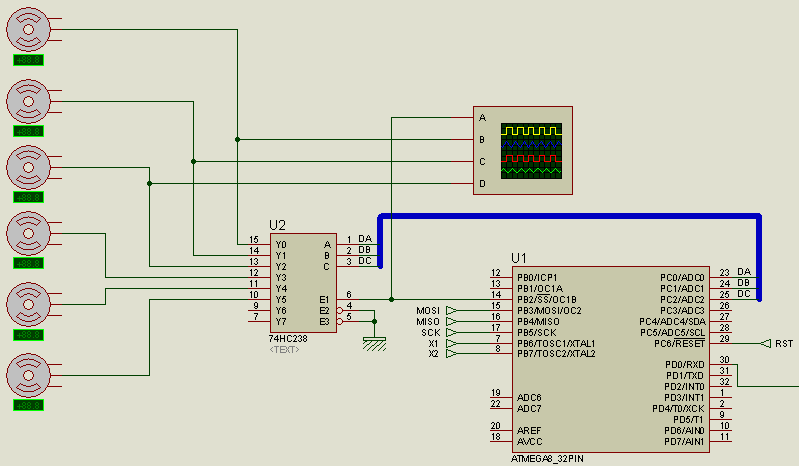
В роли демультиплексора — 74HC238, на его вход E подаются импульсы с выхода микроконтроллера. Эти импульсы — ШИМ с периодом 2мс (500Гц) и скважностью 50-100%. У каждого импульса своя скважность, обозначающая состояние каждого канала. Вот так выглядит сигнал на входе Е:

Для того, чтобы 74HC238 знал на какой выход подать текущий сигнал используем PORTC микроконтроллера и входы A, B, C демультиплексора. В результате на выходах получаем такие сигналы:

Сигналы на выходе получаются правильной частоты (50Гц) и скважности (5-10%). Итак, нужно генерировать ШИМ частотой 500Гц и заполнением 50-100%, вот табличка для настройки предделителя и ТОР 16-битного счетчика:

Интересно, что возможное количество значений ШИМа ровно в 1000 раз меньше частоты таймера.
Налаживание передатчика
При заведомо исправных деталях и правильном монтаже передатчик не требует особой наладки. Необходимо только убедиться в его работоспособности и, изменяя индуктивность катушки L1, добиться максимальной мощности передатчика.
Для проверки работы мультивибратора надо включить высокоомные наушники между коллектором VT2 и плюсом источника питания. При замыкании кнопки SB1 в наушниках должен прослушиваться звук низкого тона, соответствующий частоте мультивибратора.
Для проверки работоспособности генератора ВЧ необходимо собрать волномер по схеме рис. 2. Схема представляет собой простой детекторный приемник, в котором катушка L1 намотана проводом ПЭВ-1 1…1,2 и содержит 10 витков с отводом от 3 витка.
Рис. 2. Принципиальная схема волномера для настройки передатчика.
Катушка намотана с шагом 4 мм на пластмассовом каркасе 025 мм. В качестве индикатора используется вольтметр постоянного тока с относительным входным сопротивлением 10 кОм/В или микроамперметр на ток 50…100мкА.
Волномер собирают на небольшой пластине из фольгированного стеклотекстолита толщиной 1,5 мм. Включив передатчик, располагают от него волномер на расстоянии 50…60 см. При исправном генераторе ВЧ стрелка волномера отклоняется на некоторый угол от нулевой отметки.
Настраивая генератор ВЧ на частоту 27,12 МГц, сдвигая и раздвигая витки катушки L2, добиваются максимального отклонения стрелки вольтметра.
Максимальную мощность высокочастотных колебаний, излучаемых антенной, получают вращением сердечника катушки L1. Настройка передатчика считается оконченной, если вольтметр волномера на расстоянии 1…1,2 м от передатчика показывает напряжение не менее 0,05 В.
Настройка приемника
Настройку приемника начинают с сверхрегенеративного каскада. Подключают высокоомные наушники параллельно конденсатору С7 и включают питание. Появившийся в наушниках шум свидетельствует об исправной работе сверхрегенеративного детектора.
Изменением сопротивления резистора R1 добиваются максимального шума в наушниках. Каскад усиления напряжения на транзисторе VT2 и электронное реле особой наладки не требуют.
Подбором сопротивления резистора R7 добиваются чувствительности приемника порядка 20 мкВ. Окончательная настройка приемника производится совместно с передатчиком.
Если в приемнике параллельно обмотке реле К1 подключить наушники и включить передатчик, то в наушниках должен прослушиваться громкий шум. Настройка приемника на частоту передатчика приводит к пропаданию шума в наушниках и срабатыванию реле.
Литература: В.М. Пестриков. Энциклопедия радиолюбителя.
Передающая часть
Самолетная часть есть, осталось разобраться с наземной аппаратурой. Как уже писалось ранее, данные передаются по UART, на каждый канал по одному байту. Вначале подключал свою систему проводом через
к компьютеру и команды слал через терминал. Чтобы дешифратор определял начало посылки, а в будущем выделял посылки адресуемые именно ему, вначале шлется байт-идентификатор, затем 8 байт определяющих состояние каналов. Позже стал использовать радиомодули, при отключении передатчика все моторчики начинали дико дергаться.
Дабы отфильтровать сигнал от шумов, десятым байтом шлю XOR всех 9 предыдущих байт. Помогло, но слабо, добавил еще проверку на таймаут между байтами, если он превышается — вся посылка игнорится и прием начинается заново, с ожидания байта-идентификатора.

Число в нижнем левом углу — контрольная сумма. Передвигая ползунки на компе двигались рули на самолете! Вообщем отладил я все это и стал думать о пульте ДУ, купил для него вот такие джойстики:

Но потом меня посетила одна мысль. В свое время я тащился от всяких авиасимуляторов: «Ил-2 Штурмовик», «Lock On», «MSFSX», «Ка-50 Черная Акула» и др. Соответственно был у меня джойстик Genius F-23 и решил я прикрутить его к вышеописанной проге с ползунками. Погуглил как это реализовать, нашел этот
и получилось! Управлять самолетиком с помощью полноценного джойстика, мне кажется, гораздо круче, чем маленькой палочкой на пульте. Вообщем все вместе изображено на первой фотке — это нетбук, джойстик, преобразователь на FT232, и подключенный к нему передатчик HM-T868.
Программная реализация
Для ATmega8 с тактовой частотой 16МГц в AtmelStudio6 все реализуется следующим образом: вначале задефайним значения счетчика для крайних положений сервомашинок:
#define LOW 16000U
#define HIGH 32000U
затем инициализируем генератор ШИМа на таймере/счетчике1:
OCR1A = HIGH; //Устанавливаем ТОР
TCCR1A = 0<<COM1A1 | 0<<COM1A0 | 1<<COM1B1 | 0<<COM1B0 | 0<<FOC1A | 0<<FOC1B | 1<<WGM11 | 1<<WGM10; //Запускаем неинвертированный Fast PWM на выходе OC1B с верхним значением счетчика, которое записанно в OCR1A
TCCR1B = 0<<ICNC1 | 0<<ICES1 | 1<<WGM13 | 1<<WGM12 | 0<<CS12 | 0<<CS11 | 1<<CS10; //предделитель 1
TIMSK = 1<<OCIE1A | 1<<OCIE1B | 0<<TOIE1; //Разрешаем прерывания по совпадению
Остается реализовать прерывания:
Пуск!
Итак, есть самолетик, есть радиоуправление — Поехали!(с) Первый полет производился над асфальтом, результат — сломанный пополам фюзеляж и полувырванный двигатель. Второй полет производился над более мягкой поверхностью:
Последующие полетов 10 были тоже не особо удачными. Основной причиной я считаю сильную дискретность джойстика — по крену он выдавал только 16 значений (вместо возможных 256), с осью тангажа — не лучше. Но так как в результате испытаний самолет был значительно поврежден и не подлежит ремонту:

Реализация в железе
Ну с теорией разобрались, пришло время все это реализовать. Мозгом системы выбран микроконтроллер ATmega8A, тактируется от кварца на 16МГц (не потому, что я захотел 16000 позиций сервомашинки, а потому, что у меня такие валялись). Управляющий сигнал для МК будет поступать через UART. В результате получилась вот такая схемка:
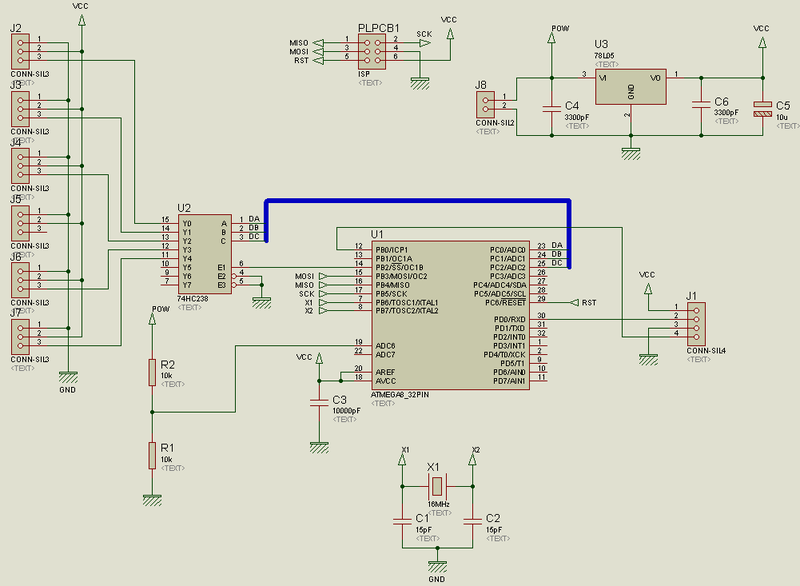
Спустя некоторое время появилась вот такая платка:
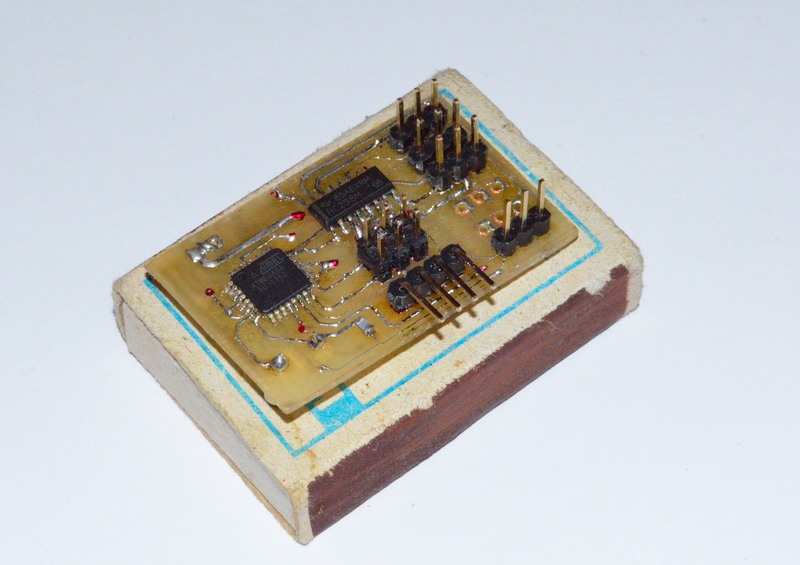
Два трехштыревых разъема я не припаял потому, что они мне не нужны, а не подряд они впаяны поскольку у меня нету металлизации отверстий, а в нижнем разъеме дорожки с двух сторон, можно было бы заменить проволочкой, но программно нету проблемы выводить сигнал на любой разъем. Также отсутствует 78L05 ибо в моем регуляторе двигателя есть встроенный стабилизатор (ВЕС).
Для получения данных к плате подключается
HM-R868:
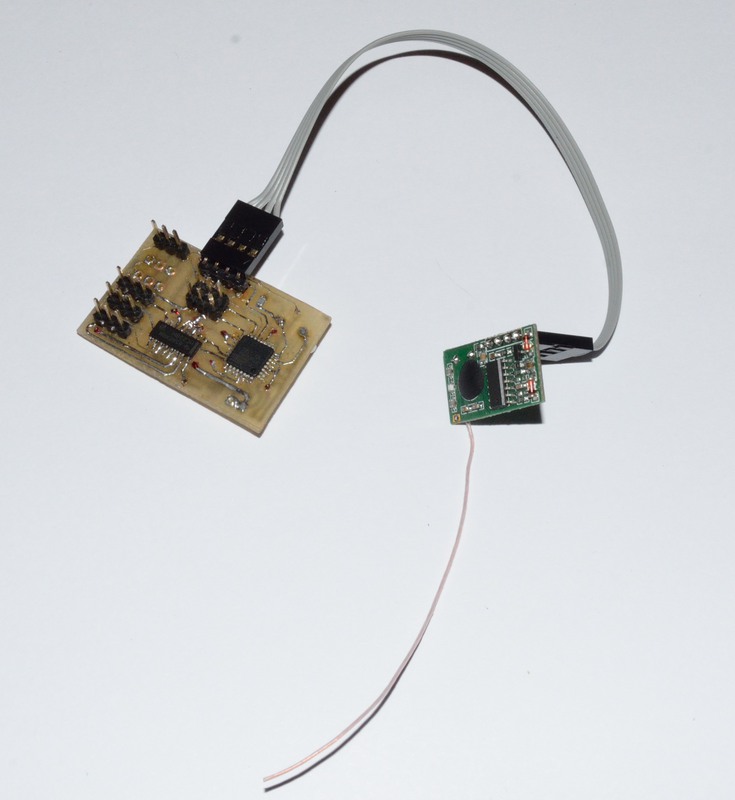
Изначально думал втыкать его прямо в плату, но эта конструкция не помещалась в самолетик, пришлось сделать через шлейф. Если изменить прошивку, то контакты разъема для программирования можно использовать для включения/отключения каких-нибудь системам (бортовые огни и т.п.)
Плата обошлась примерно в 20грн = $2.50, приемник — 30грн = $3,75.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Схема передатчика. Рисунок 1. | |||||||
| DD1 | Микросхема | К561ЛЕ10 | 1 | Поиск в магазине Отрон | |||
| DD2 | Микросхема | К561ИЕ8 | 1 | Поиск в магазине Отрон | |||
| VT1, VT2 | Биполярный транзистор | КТ315Г | 2 | Поиск в магазине Отрон | |||
| VD1 | Диод | КД503А | 1 | Поиск в магазине Отрон | |||
| С1 | Конденсатор | 6800 пФ | 1 | Поиск в магазине Отрон | |||
| С2 | Конденсатор | 0.047 мкФ | 1 | Поиск в магазине Отрон | |||
| С3 | Конденсатор | 27 пФ | 1 | Поиск в магазине Отрон | |||
| С4 | Конденсатор | 16 пФ | 1 | Поиск в магазине Отрон | |||
| С5 | Конденсатор | 43 пФ | 1 | Поиск в магазине Отрон | |||
| R1 | Резистор | 750 кОм | 1 | Поиск в магазине Отрон | |||
| R2 | Резистор | 270 кОм | 1 | Поиск в магазине Отрон | |||
| R3 | Резистор | 110 кОм | 1 | Поиск в магазине Отрон | |||
| R4 | Резистор | 33 кОм | 1 | Поиск в магазине Отрон | |||
| R5 | Резистор | 7.5 кОм | 1 | Поиск в магазине Отрон | |||
| R6 | Резистор | 220 Ом | 1 | Поиск в магазине Отрон | |||
| Z1 | Кварцевый резонатор | 27.12 МГц | 1 | Поиск в магазине Отрон | |||
| L1 | Катушка индуктивности | 1 | Изготавливается самостоятельно | Поиск в магазине Отрон | |||
| Схема приемника. Рисунок 2. | |||||||
| VT1-VT4 | Биполярный транзистор | КТ315Г | 4 | Поиск в магазине Отрон | |||
| С1 | Конденсатор | 4.7 пФ | 1 | Поиск в магазине Отрон | |||
| С2 | Конденсатор | 27 пФ | 1 | Поиск в магазине Отрон | |||
| С3 | Конденсатор | 0.015 мкФ | 1 | Поиск в магазине Отрон | |||
| С4, С8, С11, С12 | Электролитический конденсатор | 10 мкФ 10 В | 4 | Поиск в магазине Отрон | |||
| С5 | Конденсатор | 18 пФ | 1 | Поиск в магазине Отрон | |||
| С6 | Конденсатор | 2200 пФ | 1 | Поиск в магазине Отрон | |||
| С7 | Конденсатор | 0.047 мкФ | 1 | Поиск в магазине Отрон | |||
| С9 | Конденсатор | 0.1 мкФ | 1 | Поиск в магазине Отрон | |||
| С10 | Конденсатор | 3300 пФ | 1 | Поиск в магазине Отрон | |||
| С13 | Электролитический конденсатор | 500 мкФ 6.3 В | 1 | Поиск в магазине Отрон | |||
| R1 | Резистор | 33 кОм | 1 | Поиск в магазине Отрон | |||
| R2 | Резистор | 20 кОм | 1 | Поиск в магазине Отрон | |||
| R3 | Резистор | 3.3 кОм | 1 | Поиск в магазине Отрон | |||
| R4 | Резистор | 9.1 кОм | 1 | Поиск в магазине Отрон | |||
| R5 | Резистор | 510 кОм | 1 | Поиск в магазине Отрон | |||
| R6 | Подстроечный резистор | 1 МОм | 1 | Поиск в магазине Отрон | |||
| R7 | Резистор | 12 кОм | 1 | Поиск в магазине Отрон | |||
| R8 | Резистор | 2 кОм | 1 | Поиск в магазине Отрон | |||
| R9 | Резистор | 1 кОм | 1 | Поиск в магазине Отрон | |||
| R10 | Резистор | 22 кОм | 1 | Поиск в магазине Отрон | |||
| R11 | Резистор | 7.5 кОм | 1 | Поиск в магазине Отрон | |||
| L1 | Катушка индуктивности | 1 | Изготавливается самостоятельно | Поиск в магазине Отрон | |||
| L2 | Дроссель | 30 мкГн | 1 | Дроссель типа ДМ-0.2 | Поиск в магазине Отрон | ||
| Схема дешифратора. Рисунок 4. | |||||||
| DD1, DD8 | Микросхема | К561ЛП2 | 2 | Поиск в магазине Отрон | |||
| DD2 | Микросхема | К561ИЕ10 | 1 | Поиск в магазине Отрон | |||
| DD3, DD4 | Микросхема | К561ИР2 | 2 | Поиск в магазине Отрон | |||
| DD5 | Микросхема | К561ЛП13 | 1 | Поиск в магазине Отрон | |||
| DD6 | Микросхема | К561ИД1 | 1 | Поиск в магазине Отрон | |||
| DD7 | Микросхема | К561ТМ2 | 1 | Поиск в магазине Отрон | |||
| VT1, VT2 | Биполярный транзистор | КТ815А | 2 | Поиск в магазине Отрон | |||
| VD1 | Диод | КД503А | 1 | Поиск в магазине Отрон | |||
| С1 | Конденсатор | 0.01 мкФ | 1 | Поиск в магазине Отрон | |||
| С2 | Конденсатор | 0.033 мкФ | 1 | Поиск в магазине Отрон | |||
| С3, С4 | Конденсатор | 0.1 мкФ | 2 | Поиск в магазине Отрон | |||
| R1 | Резистор | 110 кОм | 1 | Поиск в магазине Отрон | |||
| R2 | Резистор | 620 кОм | 1 | Поиск в магазине Отрон | |||
| Дополнение по общей схеме. Рисунок 5. | |||||||
| С1-С4 | Конденсатор | 0.22 мкФ | 4 | Поиск в магазине Отрон | |||
| L1-L4 | Дроссель | 12 мкГн | 4 | Дроссель типа ДМ-3 | Поиск в магазине Отрон | ||
| М1, М2 | Электродвигатель постоянного тока | 6 Вольт | 2 | Поиск в магазине Отрон | |||
| HL1 | Лампочка | 6 Вольт | 1 | Поиск в магазине Отрон | |||
| БВ1, БВ2 | Батарея питания | 6 Вольт | 2 | Поиск в магазине Отрон | |||
| SA1 | Спаренный выключатель питания | 1 | Поиск в магазине Отрон | ||||
| SB1, SB2 | Выключатель | 2 | Поиск в магазине Отрон | ||||
| Антенна | 1 | Велосипедная спица | Поиск в магазине Отрон | ||||
Схема передатчика
Для управления моделями в радиусе 500 м, как показывает опыт, достаточно иметь передатчик с выходной мощностью окьло 100 мВт. Передатчики радиоуправляемых моделей, как правило, работают в диапазоне 10 м.
Однокомандное управление моделью осуществляется следующим образом. При подаче команды управления передатчик излучает высокочастотные электромагнитные колебания, другими словами, генерирует одну несущую частоту.
Приемник, который находится на модели принимает сигнал, посланный передатчиком, в результате чего срабатывает исполнительный механизм.
Рис. 1. Принципиальная схема передатчика радиоуправляемой модели.
В итоге модель, подчинясь команде, меняет направление движения или осуществляет одно какое-нибудь заранее заложенное в конструкцию модели указание. Используя однокомандную модель управления, можно заставить модель осуществлять достаточно сложные движения.
Схема однокомандного передатчика представлена на рис. 1. Передатчик включает задающий генератор колебаний высокой частоты и модулятор.
Задающий генератор собран на транзисторе VT1 по схеме емкостной трех-точки. Контур L2, С2 передатчика настроен на частоту 27,12 МГц, которая отведена Госсвязьнадзором электросвязи для радиоуправления моделями.
Режим работы генератора по постоянному току определяется подбором величины сопротивления резистора R1. Созданные генератором высокочастотные колебания излучаются в пространство антенной, подключенной к контуру через согласующую катушку индуктивности L1.
Модулятор выполнен на двух транзисторах VT1, VT2 и представляет собой симметричный мультивибратор. Модулируемое напряжение снимается с коллекторной нагрузки R4 транзистора VT2 и подается в общую цепь питания транзистора VT1 высокочастотного генератора, что обеспечивает 100% модуляцию.
Управляется передатчик кнопкой SB1, включенной в общую цепь питания. Задающий генератор работает не непрерывно, а только при нажатой кнопке SB1, когда появляются импульсы тока, вырабатываемые мультивибратором.
Посылка в антенну высокочастотных колебаний, созданных задающим генератором, происходит отдельными порциями, частота следования которых соответствует частоте импульсов модулятора.
Схема приемника
Для управления моделью радиолюбители довольно часто используют приемники, построенные по схеме сверхрегенератора. Это связано с тем, что сверхрегенеративный приемник, имея простую конструкцию, обладает очень высокой чувствительностью, порядка 10…20 мкВ.
Схема сверхрегенеративного приемника для модели приведена на рис. 3. Приемник собран на трех транзисторах и питается от батареи типа «Крона» или другого источника напряжением 9 В.
Первый каскад приемника представляет собой сверхрегенеративный детектор с самогаше-нием, выполненный на транзисторе VT1. Если на антенну не поступает сигнал, то этот каскад генерирует импульсы высокочастотных колебаний, следующих с частотой 60…100 кГц. Это и есть частота гашения, которая задается конденсатором С6 и резистором R3.
Рис. 3. Принципиальная схема сверхрегенеративного приемника радиоуправляемой модели.
Усиление выделенного командного сигнала сверхрегенеративным детектором приемника происходит следующим образом. Транзистор VT1 включен по схеме с общей базой и его коллекторный ток пульсирует с частотой гашения.
При отсутствии на входе приемника сигнала, эти импульсы детектируются и создают на резисторе R3 некоторое напряжение. В момент поступления сигнала на приемник продолжительность отдельных импульсов возрастает, что приводит к увеличению напряжения на резисторе R3.
Приемник имеет один входной контур L1, С4, который с помощью сердечника катушки L1 настраивается на частоту передатчика. Связь контура с антенной — емкостная.
Принятый приемником сигнал управления выделяется на резисторе R4. Этот сигнал в 10…30 раз меньше напряжения частоты гашения.
Для подавления мешающего напряжения с частотой гашения между сверхрегенеративным детектором и усилителем напряжения включен фильтр L3, С7.
При этом на выходе фильтра напряжение частоты гашения в 5… 10 раз меньше амплитуды полезного сигнала. Продетектированный сигнал через разделительный конденсатор С8 подается на базу транзистора VT2, представляющего собой каскад усиления низкой частоты, а далее на электронное реле, собранное на транзисторе ѴТЗ и диодах VD1, VD2.
Усиленный транзистором ѴТЗ сигнал выпрямляется диодами VD1 и VD2. Выпрямленный ток (отрицательной полярности) поступает на базу транзистора ѴТЗ.
При появлении тока на входе электронного реле, коллекторный ток транзистора увеличивается и срабатывает реле К1. В качестве антенны приемника можно использовать штырь длиной 70… 100 см. Максимальная чувствительность сверхрегенеративного приемника устанавливается подбором сопротивления резистора R1.


