

Исходный код программы
В программе первым делом необходимо инициализировать выходные контакты для подключения двигателей (через драйвер мотора).
Затем в функции setup задать направление работы для этих контактов (на вывод данных).
После этого мы будем считывать данные из последовательного порта Arduino, получаемые им от последовательного порта Bluetooth модуля, и выполнять соответствующие инструкции.
Затем мы запрограммируем функции для различных направлений движения машины. Всего будет использоваться пять условий для задания направления движения машины, представленных в следующей таблице:
Далее представлен полный текст программы.
#define m11 11 // задний двигатель #define m12 12 #define m21 10 // передний двигатель #define m22 9 charstr[2],i; voidforward() { digitalWrite(m11,LOW); digitalWrite(m12,LOW); digitalWrite(m21,HIGH); digitalWrite(m22,LOW); } voidbackward() { digitalWrite(m11,LOW); digitalWrite(m12,LOW); digitalWrite(m21,LOW); digitalWrite(m22,HIGH); } voidleft() { digitalWrite(m11,HIGH); digitalWrite(m12,LOW); delay(100); digitalWrite(m21,HIGH); digitalWrite(m22,LOW); } voidright() { digitalWrite(m11,LOW); digitalWrite(m12,HIGH); delay(100); digitalWrite(m21,HIGH); digitalWrite(m22,LOW); } voidStop() { digitalWrite(m11,LOW); digitalWrite(m12,LOW); digitalWrite(m21,LOW); digitalWrite(m22,LOW); } voidsetup() { Serial.begin(9600); pinMode(m11,OUTPUT); pinMode(m12,OUTPUT); pinMode(m21,OUTPUT); pinMode(m22,OUTPUT); } voidloop() { while(Serial.available()) { charch=Serial.read(); str[i ]=ch; if(str[i–1]==‘1’) { Serial.println(“Forward”); forward(); i=0; } elseif(str[i–1]==‘2’) { Serial.println(“Left”); right(); i=0; } elseif(str[i–1]==‘3’) { Serial.println(“Right”); left(); i=0; } elseif(str[i–1]==‘4’) { Serial.println(“Backward”); backward(); i=0; } elseif(str[i–1]==‘5’) { Serial.println(“Stop”); Stop(); i=0; } delay(100); } } |
Код программы для «малыша»:
#include <SoftwareSerial.h> // Подключаем библиотеку SoftwareSerial для общения с модулем по программной шине UART
#include <iarduino_Bluetooth_HC05.h> // Подключаем библиотеку iarduino_Bluetooth_HC05 для работы с Trema Bluetooth модулем HC-05
SoftwareSerial softSerial(9, 10); // Создаём объект softSerial указывая выводы RX, TX (можно указывать любые выводы Arduino UNO). Вывод 2 Arduino подключается к выводу TX модуля, вывод 3 Arduino подключается к выводу RX модуля
iarduino_Bluetooth_HC05 hc05(13); // Создаём объект hc05 указывая любой вывод Arduino, который подключается к выводу K модуля
//
uint8_t pinShield_H2 = 4; // Вывод, подключенный к драйверу, для задания направления вращения левым мотором
uint8_t pinShield_E2 = 5; // Вывод ШИМ, подключенный к драйверу, для задания скорости левого мотора
uint8_t pinShield_E1 = 6; // Вывод ШИМ, подключенный к драйверу, для задания скорости правого мотора
uint8_t pinShield_H1 = 7; // Вывод, подключенный к драйверу, для задания направления вращения правым мотором
uint8_t pinLED_RED = 12; // Вывод с красным светодиодом
uint8_t pinLED_BLUE = 11; // Вывод с синим светодиодом
uint16_t time_period = 200; // Частота мигания светодиодов (в миллисекундах)
uint8_t valSpeed = 255; // Максимальная скорость ШИМ (число от 0 до 255)
bool arrRoute[2] = {1, 1}; // Направление движения для каждого мотора ([0]- правый мотор, [1] - левый мотор)
uint16_t arrSpeed[2]; // Скорость для каждого мотора ([0]- правый мотор, [1] - левый мотор)
uint32_t tmrLED; // Время последнего включения светодиодов
uint32_t flgTime; // Флаг для задания времени принятия пакетов от Bluetooth телефона
uint8_t flg; // Флаг кнопок
uint32_t tmrWait; // Время до начала сопряжения с новыми устройствами
bool flg_LED; // Флаг включения светодиодов
// </iarduino_bluetooth_hc05.h></softwareserial.h>
void setup() { //
// BLUETOOTH МОДУЛЬ //
Serial.begin (9600); // Инициируем передачу данных по аппаратной шине UART для вывода результата в монитор последовательного порта
Serial.print ("begin: "); // Выводим текст "begin: " в монитор последовательного порта
if (hc05.begin(softSerial)) {Serial.println("Ok");} // Инициируем работу с Trema модулем hc05, указывая объект softSerial через который осуществляется связь по шине UART
else {Serial.println("Error");} // Если работа с модулем не инициирована, то выводим сообщение об ошибке
tmrWait = millis(); // Устанавливаем таймер ожидания сопряжения
while (!hc05.checkConnect() && millis()<tmrWait 60000) {;} // Ждём в течении 60 секунд сопряжения с последним устройством из памяти
if (millis()<tmrWait 60000) {Serial.println("Connect with last ADR");} // Если сопряжение произошло, то выдаём в монитор порта сообщение об этом
else { // Если сопряжение не произошло, то
if (hc05.createSlave("BT_CAR", "1234")) // Создаем ведомую роль модулю, указывая его имя и pin-код (в примере имя = "BT_CAR", pin-код = "1234")
{Serial.println("Slave create");} // Если ведомая роль была создана, выводим сообщение об успехе в монитор порта,
else {Serial.println("Slave not create");} // а если не была создана - выводим сообщение об ошибке в монитор порта.
} //
// МОТОРЫ //
pinMode(pinShield_H2, OUTPUT); // Конфигурируем вывод pinShield_H2 как выход (направление вращения левого мотора)
pinMode(pinShield_E2, OUTPUT); // Конфигурируем вывод pinShield_E2 как выход (скорость вращения левого мотора, ШИМ)
pinMode(pinShield_E1, OUTPUT); // Конфигурируем вывод pinShield_E1 как выход (скорость вращения правого мотора, ШИМ)
pinMode(pinShield_H1, OUTPUT); // Конфигурируем вывод pinShield_H1 как выход (направление вращения правого мотора)
// СВЕТОДИОДЫ //
pinMode(pinLED_RED,OUTPUT); // Конфигурируем вывод pinLED_RED как выход
pinMode(pinLED_BLUE,OUTPUT); // Конфигурируем вывод pinLED_BLUE как выход
tmrLED = millis(); // Устанавливаем таймер светодиодов равным millis()
flg_LED = 0; // Сбрасываем флаг светодиодов
} //
void loop() { //
if (softSerial.available()) { // Если есть принятые данные, то ...
String str; // Создаём строку str
while (softSerial.available()) { // Выполняем цикл пока есть что читать ...
str = char(softSerial.read()); // Читаем очередной принятый символ из UART в строку str
delay(5); // Задержка на 5 мс на случай медленного приёма
} // Цикл завершён, значит читать больше нечего
// КНОПКИ ДВИЖЕНИЯ //
// Флаг времени Флаг кнопки //
if (str == "II") { flgTime = millis(); flg = 1; } // Кнопка "стрелка вверх-влево"
if (str == "FF") { flgTime = millis(); flg = 2; } // Кнопка "стрелка вверх"
if (str == "GG") { flgTime = millis(); flg = 3; } // Кнопка "стрелка вверх-вправо"
if (str == "RR") { flgTime = millis(); flg = 4; } // Кнопка "стрелка влево"
if (str == "SS") { flgTime = millis(); flg = 5; } // СТОП
if (str == "LL") { flgTime = millis(); flg = 6; } // Кнопка "стрелка вправо"
if (str == "JJ") { flgTime = millis(); flg = 7; } // Кнопка "стрелка вниз-влево"
if (str == "BB") { flgTime = millis(); flg = 8; } // Кнопка "стрелка вниз"
if (str == "HH") { flgTime = millis(); flg = 9; } // Кнопка "стрелка вниз-вправо"
// КНОПКИ ДОПОЛНИТЕЛЬНЫХ ФУНКЦИЙ //
// Если кнопка нажата меняем флаг //
if (str == "SWS" || str == "SwS") {flg_LED = !flg_LED;} // Кнопка включения светодиодов
if (str == "S0S") {flg = 10; } // Ползунок скорости в положении 0
if (str == "S1S") {flg = 11; } // Ползунок скорости в положении 1
if (str == "S2S") {flg = 12; } // Ползунок скорости в положении 2
if (str == "S3S") {flg = 13; } // Ползунок скорости в положении 3
if (str == "S4S") {flg = 14; } // Ползунок скорости в положении 4
if (str == "S5S") {flg = 15; } // Ползунок скорости в положении 5
if (str == "S6S") {flg = 16; } // Ползунок скорости в положении 6
if (str == "S7S") {flg = 17; } // Ползунок скорости в положении 7
if (str == "S8S") {flg = 18; } // Ползунок скорости в положении 8
if (str == "S9S") {flg = 19; } // Ползунок скорости в положении 9
if (str == "SqS") {flg = 20; } // Ползунок скорости в положении 10
// ======================================================================================================================================================
switch (flg) {//Направление левого мотора Направление правого мотора Скорость левого мотора Скорость правого мотора
case 1: arrRoute[1] = 1; arrRoute[0] = 1; arrSpeed[1] = (valSpeed / 2); arrSpeed[0] = valSpeed; break; // С-З
case 2: arrRoute[1] = 1; arrRoute[0] = 1; arrSpeed[1] = valSpeed; arrSpeed[0] = valSpeed; break; // С
case 3: arrRoute[1] = 1; arrRoute[0] = 1; arrSpeed[1] = valSpeed; arrSpeed[0] = (valSpeed / 2); break; // С-В
case 4: arrRoute[1] = 1; arrRoute[0] = 1; arrSpeed[1] = 0; arrSpeed[0] = valSpeed; break; // З
case 5: arrRoute[1] = 1; arrRoute[0] = 1; arrSpeed[1] = 0; arrSpeed[0] = 0; break; // Стоп
case 6: arrRoute[1] = 1; arrRoute[0] = 1; arrSpeed[1] = valSpeed; arrSpeed[0] = 0; break; // В
case 7: arrRoute[1] = 0; arrRoute[0] = 0; arrSpeed[1] = (valSpeed / 2); arrSpeed[0] = valSpeed; break; // Ю-З
case 8: arrRoute[1] = 0; arrRoute[0] = 0; arrSpeed[1] = valSpeed; arrSpeed[0] = valSpeed; break; // Ю
case 9: arrRoute[1] = 0; arrRoute[0] = 0; arrSpeed[1] = valSpeed; arrSpeed[0] = (valSpeed / 2); break; // Ю-В
} //
} // =======================================================================================================================================================
if (flg == 10){valSpeed = 5;} // 0 режим скорости
else if(flg == 11){valSpeed = 30;} // 1 режим скорости
else if(flg == 12){valSpeed = 55;} // 2 режим скорости
else if(flg == 13){valSpeed = 80;} // 3 режим скорости
else if(flg == 14){valSpeed = 105;} // 4 режим скорости
else if(flg == 15){valSpeed = 130;} // 5 режим скорости
else if(flg == 16){valSpeed = 155;} // 6 режим скорости
else if(flg == 17){valSpeed = 180;} // 7 режим скорости
else if(flg == 18){valSpeed = 205;} // 8 режим скорости
else if(flg == 19){valSpeed = 230;} // 9 режим скорости
else if(flg == 20){valSpeed = 255;} // 10 режим скорости
//
if (flg_LED) { // Если флаг установлен (была нажата кнопка включения фары)
if (millis() - tmrLED > time_period) { // мигаем светодиодами с заданной частотой
tmrLED = millis(); // сохраняем время
digitalWrite(pinLED_RED, digitalRead(pinLED_BLUE)); // управляем питанием красного светодиода
digitalWrite(pinLED_BLUE, !digitalRead(pinLED_BLUE)); // управляем питанием синего светодиода
} //
} else { // если флаг сброшен, то
digitalWrite(pinLED_RED, LOW); // гасим светодиоды
digitalWrite(pinLED_BLUE, LOW); //
} //
if (flgTime > millis()) { // Если millis() переполнен, то
flgTime = 0; // сбрасываем флаг в ноль
} //
// ПОДАЧА ЗНАЧЕНИЙ СКОРОСТИ И НАПРАВЛЕНИЯ ВРАЩЕНИЯ НА ВЫВОДЫ //
if (flgTime > (millis() - 500)) { // Если сигналы с телефона приходят (в течении 50 мс)
digitalWrite(pinShield_H2, arrRoute[1]); // тогда задаем направление вращения правого мотора
digitalWrite(pinShield_H1, arrRoute[0]); // и левого мотора
analogWrite(pinShield_E2, arrSpeed[1]); // Задаём скорость вращения для правого мотора
analogWrite(pinShield_E1, arrSpeed[0]); // и для левого мотора
} else { // Если пакеты не приходят
analogWrite(pinShield_E2, 0); // Останавливаем работу моторов
analogWrite(pinShield_E1, 0); //
} //
} // Ссылка для скачивания скетча.
В данном коде управление роботом осуществляется в три основных этапа: получение данных с телефона; изменение значений переменных arrSpeed, arrRoute; подача питания на моторы и задание направления их вращения. Так же в коде присутствуют дополнительные блоки: включение/выключение светодиодов; изменение скорости вращения колёс; вход в режим сопряжения.
- Получение данных с пульта:
- Данный блок начинается с оператора
if, в условии которого написаноsoftSerial.available(). Это условие будет верно, если в последовательный порт будут приходить данные с телефона, в противном случае условие будет ложно; - Далее следует еще один оператор
while, условием которого опять являетсяsoftSerial.available(). Если условие верно, то значение, поступившее в последовательный порт, будет записано в переменнуюstr; задержка в 5 миллисекунд сделана для того, чтобы при низкой скорости передачи Arduino успел полностью прочитать значение из последовательного порта в переменнуюstr;
- Данный блок начинается с оператора
- Изменение значений переменных arrSpeed, arrRoute:
- Данный блок начинается с оператора
if, в условии которого написаноstr == XX. В зависимости от значенияXX, которое принимает переменнаяstr(одно из 9 для основных функций), сбрасываетсяflgTime– таймер начала выполнения функции, а так же устанавливается значение флагаflg(от 1 до 9); - Далее следует конструкция
switch...case, в которой операторswitchсравнивает значение флагаflgс операторомcaseи, в зависимости от значения флагаflg, выполняет код, где задаётся, на какой мотор будет подано питание (переменнаяarrSpeed) и с каким направлением вращения ( переменнаяarrRoute);
- Данный блок начинается с оператора
- Подача питания на моторы и задание направления их вращения:
- Данный блок начинается с оператора
if, в условии которого написаноflgTime > (millis() - 50). Это условие будет верно в течении 50 миллисекунд после начала приёма сигнала от телефона и установит на выводах Arduino значения переменныхarrSpeedиarrRoute. Если же сигнала в течении 50 миллисекунд не поступит, то операторelseсбросит значение скорости в 0 и робот остановится;
- Данный блок начинается с оператора
- Включение/выключение светодиодов:
- Данный блок включает в себя 2 части: получение сигнала с телефона и изменение флага
flg_LED; включение/выключение светодиодов; - Первая часть начинается с оператора
if, в условии которого написано( str == "SWS" || str == "SwS"). Условие будет верно, если значение переменнойstrбудет равноSWSИЛИSwS, что приведёт к установке флагаflg_LEDв противоположное от нынешнего значение; - Вторая часть начинается с оператора
if, в условии которого написано(flg_LED). Условие будет верно, если значение флагаflg_LEDбудетtrue, что приведёт к включению светодиодов. Если же значение флагаflg_LEDбудетfalse, то светодиоды погаснут.
- Данный блок включает в себя 2 части: получение сигнала с телефона и изменение флага
- Изменение скорости вращения колёс:
- Данный бок включает в себя 2 части: получение сигнала с телефона и изменение флага
flg; изменение значения переменнойvalSpeed; - Первая часть начинается с оператора
if, в условии которого написаноstr == XX. В зависимости от значенияXX, которое принимает переменнаяstr(одно из 11 для дополнительных функций), устанавливается значение флагаflg(от 10 до 20); - Вторая часть начинается с оператора
if, в условии которого написаноflg == XX. В зависимости от значенияXX, которое принимает переменнаяflg(одно из 11 для дополнительных функций), устанавливается значение переменнойvalSpeed(от 5 до 255);
- Данный бок включает в себя 2 части: получение сигнала с телефона и изменение флага
- Вход в режим сопряжения (выполняется при подаче питания на робота):
- Данный блок находится в коде
void setup()и начинается с оператораif, в условии которого написаноhc05.begin(softSerial). Это условие будет верно, если произошла успешная инициализация с Bluetooth модулем по шине UART, о чём будет выведено сообщение в монитор последовательного порта; - Далее происходит сброс таймера
tmrWaitи идёт проверка условия!hc05.checkConnect() && millis()<tmrWait 60000в операторе циклаwhile. До тех пор, пока не произойдёт сопряжения Bluetooth модуля робота и телефона И не истечёт минута(60 сек), модуль будет выполнять пустой цикл. - После цика
whileследует операторif, в условии которого написаноmillis()<tmrWait 60000. Условие будет верно, если одно из условие!hc05.checkConnect()цикла while изменится на противоположное и произойдёт это раньше, чем через 60 секунд от подачи питания на робота. Тогда в монитор последовательного порта будет выведено сообщение о том, что сопряжение произошло с ранее созданной парой из памяти устройства. - Если по истечении минуты не произошло сопряжение ранее созданной пары, то далее следует оператор
else, который выполняет вызов функцииcreateSlave("BT_CAR", "1234")объектаhc05, которая назначает Bluetooth модулю робота роль ведомого с именем “BT_CAR” и PIN-кодом “1234”, разрывает ранее установленную связь с мастером (если она была) и стирает список ранее созданных пар. После этого модуль начинает ожидать подключения мастера, который правильно укажет имя и PIN-код модуля. Об успешном или, наоборот, неудачном выполнении функции будет выведено сообщение в монитор последовательного порта.
- Данный блок находится в коде
Получение данных и работа с Trema-модулем Bluetooth HC-05 осуществляется через функции и методы объекта hc05 библиотеки iarduino_Bluetooth_HC05, с подробным описанием которых можно ознакомиться на странице Wiki – Trema-модуль bluetooth HC-05.
Роботизированная машина. часть iii: bluetooth
Данная статья интересна именно с точки зрения программирования и управления по Bluetooth. Вопросы по сборке подробно освещены в предыдущей статье.
Первое, что необходимо сделать, это дополнить робота модулем HC-06 для общения по Bluetooth. Предварительно потребуется выполнить настройку HC-06. Можно использовать модуль HC-05, но он дороже, а его функционал окажется избыточным для данной задачи.
Следующий шаг – установить на телефон бесплатную программу Bluetooth RC Controller. Программа имитирует основные органы управления пульта и отправляет команды по Bluetooth в текстовом виде.
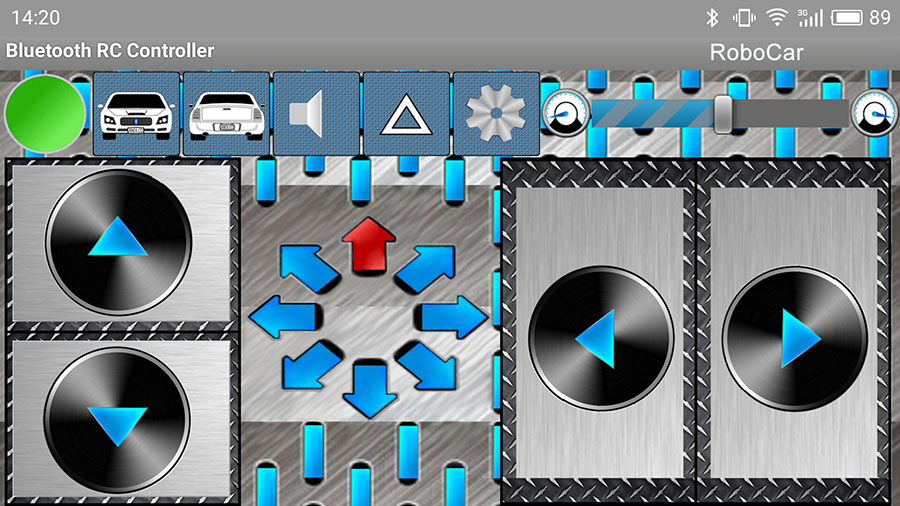
Как видно, интерфейс программы интуитино понятен. Левый верхний угол – это индикатор соединения с модулем HC-06 (зелёный говорит о том, что соединение установлено). По центру располагается “компас”, который показывает выбранное направление движения, а по переферии располагаются органы управления. Было рашено задействовать абсолютно все для нашего автомобиля. Перечисляем слева направло.
В итоге, почти все кнопки пульта сразу получили прямое соответствие имеющимся командам в машинке. Но вот кусок кода регулировки скоростей пришлось дописывать и отлаживать отдельно. Ещё нетривиально получилось с диагональными направлениями. Они реализованы через разницу скоростей на левом и правом борту.
Программа для прошивки приведена ниже. Опрос сонара в моём варианте отключен, но его можно вернуть. Удивительно, но вариант с остановкой вблизи препятствия мне показался невыносимым при ручном управлении.
*
// 4WD RoboCar
// Sonar Bluetooth
// 2023-January-20
// v.11a (bluetooth)
// (c) 2023, Vladimir E. DRACH
// Global variables:
int Critical = 14; // Критическое расстояние до препятствия в [см]
int BT_Step = 10; // Время движения при получении одного СИМВОЛА по BT [мс]
byte randomNumber; // Случайное число
byte Cost = 60; // Штраф (назначается за неспособность ехать вперёд)
byte Profit = 180; // Очки, т.е. "прибыль", которая плавно растёт при движении вперёд
byte velocity = 220; // Скорость моторов [1..255]
// Подобрать экспериментально:
const byte SPEED_MIN = 100; // минимальная скорость моторов, если меньше - моторы не смогут вращаться
const byte SPEED_MAX = 250; // максимальная скорость моторов
// для управления по Bluetooth
char btCommand = 'S';
// счетчики для определения потери связи с Bluetooth
unsigned long btTimer0 = 2000; //Stores the time (in millis since execution started)
unsigned long btTimer1 = 0; //Stores the time when the last command was received from the phone
// Описываем подключение драйвера двигателей
// A - правый борт
// В - левый борт
int enableB = 3; //~
int pinB2 = 4; //
int pinB1 = 5; //
int enableA = 6; //~
int pinA1 = 7; //~
int pinA2 = 8; //
#define illumination A0 // подключаем составной светодиод
// Подключаем ультразвуковой датчик
#define trigPin 9
#define echoPin 10
#define light 11 // На этот вывод подключены фары
int Buzzer = 12;// Подключаем зуммер 12 (!)
// Фоторезистор подключен к АЦП
#define PHOTO_SENSOR A5
#define Sweep 8000 // скорость нарастания и убывания частоты
#define Woo_wait_sec 2 // сколько с. длится гудение на макс. частоте
void setup() {
// Определяем направление работы линий
pinMode (enableA, OUTPUT);
pinMode (pinA1, OUTPUT);
pinMode (pinA2, OUTPUT);
pinMode (enableB, OUTPUT);
pinMode (pinB1, OUTPUT);
pinMode (pinB2, OUTPUT);
pinMode (13 , OUTPUT);
pinMode (light , OUTPUT);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT) ;
pinMode (illumination, OUTPUT);
enableMotors();
SayBeep();
delay(2000);
bii();
digitalWrite(13, LOW); // Выключаем встроенный диод
Serial.begin(9600); // Инициализация последовательного порта
}
// Описываем варианты работы моторов
void motorAforward() {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, LOW);
}
void motorBforward() {
digitalWrite (pinB1, LOW);
digitalWrite (pinB2, HIGH);
}
void motorAbackward() {
digitalWrite (pinA1, LOW);
digitalWrite (pinA2, HIGH);
}
void motorBbackward() {
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, LOW);
}
void motorAstop() {
digitalWrite (pinA1, HIGH);
digitalWrite (pinA2, HIGH);
}
void motorBstop() {
digitalWrite (pinB1, HIGH);
digitalWrite (pinB2, HIGH);
}
void motorAon() {
digitalWrite (enableA, HIGH);
}
void motorBon() {
digitalWrite (enableB, HIGH);
}
void motorAoff() {
digitalWrite (enableA, LOW);
}
void motorBoff() {
digitalWrite (enableB, LOW);
}
// Описываем варианты движения машины
void goForward (int duration) {
motorAforward();
motorBforward();
delay (duration);
}
void goBackward (int duration) {
motorAbackward();
motorBbackward();
delay (duration);
}
void rotateRight (int duration) {
motorAbackward();
motorBforward();
delay (duration);
}
void rotateLeft (int duration) {
motorAforward();
motorBbackward();
delay (duration);
}
void FullStop (int duration) {
motorAstop();
motorBstop();
delay (duration);
}
void disableMotors() {
motorAoff();
motorBoff();
}
void enableMotors() {
motorAon();
motorBon();
// SetVelocity(SPEED_MAX, SPEED_MAX); не очень работает :(
}
void SetVelocity(int A, int B)
{ analogWrite (enableA, A);
analogWrite (enableB, B); }
void CheckLight () {
int val = analogRead(PHOTO_SENSOR);
if (val < 500) {
// Темновато, включаем фары
digitalWrite(light, HIGH);
} else {
// Светло, выключаем фары
digitalWrite(light, LOW);
}
}
// Пользуемся УЗ датчиком расстояния
int distance() {
int duration, distance;
digitalWrite(trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1; // Переводим в сантиметры
return distance;
}
// Функция запуска автомобиля
void launch() {
int distance_measured;
distance_measured = distance();
// Serial.print(distance_0);
// Serial.println(" сантиметров. ");
SetVelocity (velocity, velocity);
// Движемся вперёд, пока расстояние до преграды > критического [cm]
while (distance_measured > Critical)
{
CheckLight (); // проверяем, не пора ли зажигать фары?
goForward(30); // Едем вперёд некоторое время
randomNumber = random(1,100); // передёрнули затвор генератора ПСЧ
if (Profit < 254 ) { Profit ; };
// Serial.print(Profit);
// Serial.println(" очков. ");
distance_measured = distance();
}
FullStop(100); // Останов, т.к. впереди помеха
}
void Woo(int freq, long duration){ // первый параметр частота, чем ниже он тем выше частота, второй длительность
long time = duration/2/freq;
for(long t = 0; t < time; t )
{ digitalWrite(Buzzer, HIGH);
delayMicroseconds(freq);
digitalWrite(Buzzer, LOW);
delayMicroseconds(freq); }
}
void Syren() {
for(int i = 0; i <= 1; i ){ // делаем виу-виу 2 раза
for(int f = 2000; f >= 100; f=f-40){ // нарастание частоты
Woo(f, Sweep); }
// Woo(400, Woo_wait_sec*100); // сколько длится гудение на максимальной частоте
for(int f = 100; f <= 2000; f=f 40){ // убывание частоты
Woo(f, Sweep); }
}
}
void panic() {
int distance_tmp;
int distance_new = 32000;
int angle = 600; // угол поворота, измеряем в [мс]
FullStop(100); // Сначала останавливаемся
Profit = 255; // Забываем про старые штрафы!
// Serial.print(Profit);
// Serial.println(" очков. ");
digitalWrite(illumination, HIGH); // включаем мигалку
Syren ();
Syren ();
Syren ();
delay(1000); // пауза, для отдыха
// Выполняем манёвры на высокой скорости (ведь паника!)
analogWrite (enableA, velocity);
analogWrite (enableB, velocity);
// 0) Начинаем крутиться волчком в какую-то сторону:
randomNumber = random(1,100);
if (randomNumber < 50) { motorAbackward(); motorBforward(); }
else { motorBbackward(); motorAforward(); };
// Истерично продолжаем крутиться, пока гудит сирена:
Syren ();
delay (1000); // Ждём
FullStop(1000);
delay (100); // Ждём
// 1) Ищем хоть какое-то направление, куда вообще можно ехать
distance_tmp = distance();
do {
rotateRight(angle); // Крутимся
FullStop(1000); // Ждём и смотрим вдаль
distance_tmp = distance();
} while(distance_tmp < Critical); // повторяем поворот, если расстояние всё ещё мало
SayBeep();
// rotateLeft(angle); // Возвращаемся на один шаг
// 2) Пытаемся выбрать лучшее направление!
do {
distance_tmp = distance();
rotateRight(angle); // Крутимся и проверяем дистанцию
FullStop(900); // Ждём и смотрим вдаль
distance_new = distance();
delay (800); // Ждём и смотрим вдаль
} while( distance_new > distance_tmp );
// Не угадали, раньше было лучше,
rotateLeft(angle); // поэтому поворачиваемся обратно
FullStop(1000); // Восстанавливаем дыхание, успокаиваемся
digitalWrite(illumination, LOW); // успокоились, выключаем мигалку
delay (410); // Ждём
SayBeep();
}
void rollBack()
{
digitalWrite(13, HIGH); // Включаем встроенный диод!
// Сначала откатываемся назад на случайное количество шагов
randomNumber = random(700,2100);
//analogWrite (enableA, 150);
//analogWrite (enableB, 189);
goBackward(randomNumber);
FullStop(200); // Восстанавливаем дыхание, успокаиваемся
// Случайным образом выбираем направление поворота:
randomNumber = random(1,100);
do { // поворачиваемся в выбранную сторону на случайный угол
if (randomNumber < 50) { rotateRight(random(450,1300)); } else { rotateLeft(random(350,1400)); };
FullStop(1000); // Выключаем моторы
tone(Buzzer, 600, 333);
delay (700); // передышка!
} while( distance() < Critical ); // повторяем поворот, если расстояние всё ещё мало
analogWrite (enableA, velocity);
analogWrite (enableB, velocity);
FullStop(600); // Восстанавливаем дыхание, успокаиваемся
digitalWrite(13, LOW); // Выключаем встроенный диод
// SayBeep();
delay (200); // передышка!
}
void avoid() {
CheckLight (); // проверяем, не пора ли зажигать фары?
tone(Buzzer, 2100, 110);
delay (700); // передышка!
// Штрафуем сами себя:
if (Profit > Cost) {
Profit = Profit - Cost; // Ещё есть возможность оплатить штраф,
rollBack(); // тогда откат назад с разворотом
// Serial.print(Profit);
// Serial.println(" очков. ");
} else {
// Нельзя штрафовать, всё плохо, значит запутались - паникуем
panic();
}
}
void SayBeep(){
tone(Buzzer, 700, 109);
delay(200);
tone(Buzzer, 1200, 109);
delay(200);
tone(Buzzer, 2600, 240);
delay(350);
noTone(Buzzer);
}
void boo(){
tone(Buzzer, 600, 200);
delay (300);
tone(Buzzer, 410, 600);
delay (600);
}
void bii(){
tone(Buzzer, 1611, 90);
delay (150);
tone(Buzzer, 1611, 90);
delay (150);
tone(Buzzer, 2111, 400);
delay (440);
}
void SafeForward (int duration){
int distance_measured;
distance_measured = distance();
if ( distance_measured > Critical )
{goForward(duration);}
else {
FullStop(10);
boo(); }
}
void BluetoothControl() {
for(int i = 0; i <= 4; i ){
// digitalWrite(illumination, HIGH); // включаем мигалку
digitalWrite(13, HIGH); // Включаем встроенный диод!
FullStop(80);
// digitalWrite(illumination, LOW); // вЫключаем мигалку
digitalWrite(13, LOW); // Включаем встроенный диод!
FullStop(900);
velocity = SPEED_MIN 10; // Выставлям скорость поменьше, т.к.
SetVelocity(velocity, velocity); // на Android будет миниальная скорость по умолчанию!
}
do{
// CheckLight (); // проверяем, не пора ли зажигать фары?
aquire();
}
while ( 1==1 );
}
void SelfControl() {
do{
randomNumber = random(2,5); // вхолостую выбираем псевдо-случайное число
launch(); // запускаем автомобиль вперёд до встречи с преградой
avoid(); // откатываемся от препятствия и как-то поворачиваемся
CheckLight (); // проверяем, не пора ли зажигать фары?
}
while ( 1==1 );
}
void aquire ()
{
if (Serial.available() > 0) {
btTimer1 = millis();
btCommand = Serial.read();
switch (btCommand){
case 'F':
goForward(BT_Step); // Можно просто ехать вперёд наобум,
// SafeForward (BT_Step); // а можно включить сонар
break;
case 'B':
goBackward(BT_Step);
break;
case 'L':
rotateLeft(BT_Step);
break;
case 'R':
rotateRight(BT_Step);
break;
case 'S':
FullStop(BT_Step);
break;
case 'G': // Вперёд, подкручивая вправо
if (velocity < SPEED_MAX-99) {
SetVelocity((velocity 99), (velocity-99));}
else {SetVelocity(SPEED_MAX, SPEED_MIN);} // выставили дифференциал
goForward (BT_Step);
SetVelocity(velocity, velocity); // вернули скорость
break;
case 'I': // Вперёд, подкручивая влево
if (velocity < SPEED_MAX-99) {
SetVelocity((velocity-99), (velocity 99));}
else {SetVelocity(SPEED_MIN,SPEED_MAX);} // выставили дифференциал
goForward (BT_Step);
SetVelocity(velocity, velocity); // вернули скорость
break;
/*case 'J': //BR
if (velocity < SPEED_MAX-80) {
SetVelocity((velocity-80), (velocity 80));}
else {SetVelocity((velocity-80),SPEED_MAX);} // выставили дифференциал
goBackward(BT_Step);
SetVelocity(velocity, velocity); // вернули скорость
break;
case 'H': //BL
if (velocity < SPEED_MAX-80) {
SetVelocity((velocity 80), (velocity-80));}
else {SetVelocity(SPEED_MAX, (velocity-80));} // выставили дифференциал
goBackward(BT_Step);
SetVelocity(velocity, velocity); // вернули скорость
break;
*/
case 'W': // Зажгли фары
digitalWrite(light, HIGH);
break;
case 'w': // Погасили фары
digitalWrite(light, LOW);
break;
case 'D': // Everything OFF
FullStop(100);
break;
case 'X': // аварийка
digitalWrite(illumination, HIGH);
break;
case 'x': // аварийка
digitalWrite(illumination, LOW);
break;
case 'U': // Back ON
digitalWrite(13, HIGH); // Включаем встроенный диод
break;
case 'u': // Back OFF
digitalWrite(13, LOW); // Выключаем встроенный диод
break;
case 'V': // Пискнуть весело (в оригинале - гудок ВКЛ)
bii();
break;
case 'v': // Пискнуть грустно (в оригинале (гудок ВЫКЛ)
boo();
break;
default: // Get SPEED_CURRENT
if ( btCommand == 'q' ){
velocity = SPEED_MAX;
SetVelocity(velocity, velocity);
} else {
// Символы '0' - '9' эквивалентны кодам integer 48 - 57 соответственно
if ( (btCommand >= 48) && (btCommand <= 57) ) {
// Subtracting 48 changes the range from 48-57 to 0-9.
// Multiplying by 25 changes the range from 0-9 to 0-225.
velocity = SPEED_MIN (btCommand - 48) * 15;
SetVelocity(velocity, velocity);
}
} // else
} // switch
} // if (Serial.available() > 0)
else {
btTimer0 = millis(); // Узнаём текущее время (millis since execution started)
//Check if it has been 500ms since we received last btCommand.
if ((btTimer0 - btTimer1) > 800) {
//More than 800 ms have passed since last btCommand received, car is out of range.
FullStop(1000);
digitalWrite(illumination, HIGH); // включаем мигалку
boo ();
FullStop(4000);
Syren();
FullStop(8000);
}
}
}
void loop() {
CheckLight (); // проверяем, не пора ли зажигать фары?
// Serial.println("System ready...");
if ( distance() > Critical )
{ // Путь вперёд свободен,
SelfControl(); // робот отправляется в самостоятельное путешествие
} else {
BluetoothControl(); // Впереди преграда, отдаём управление водителю
}
}
*
Выбор режима (ручное управление или демо) выполняется в самом начале за счёт проверки расстояния до преграды. При включении машина смотрит в стену – ручное управление по Bluetooth. При включении нет преград перед машиной – самостоятельное движение (демо-режим).
§
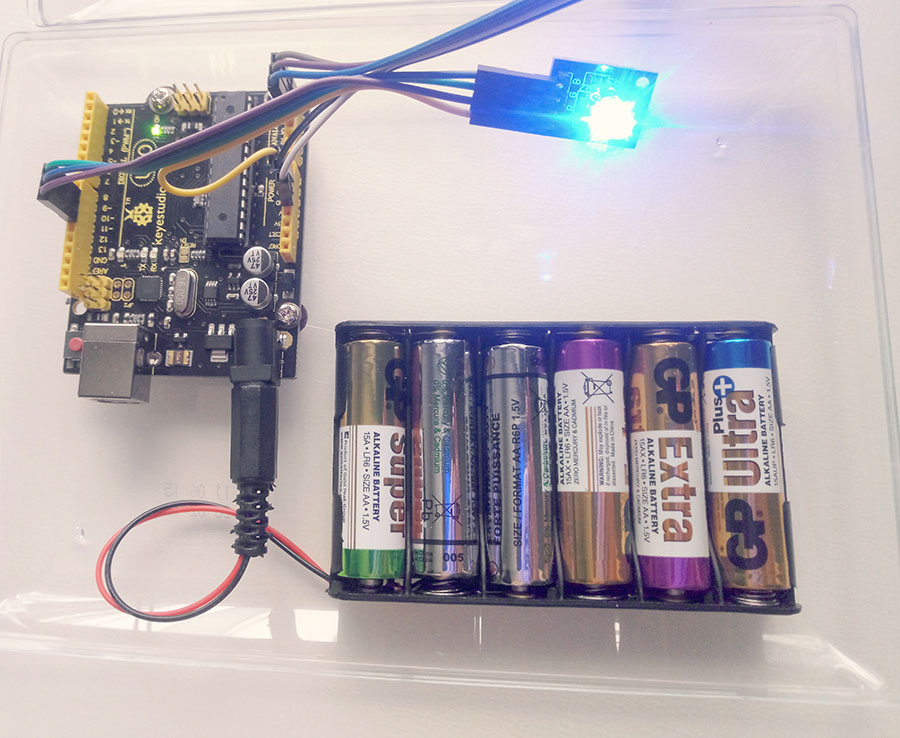
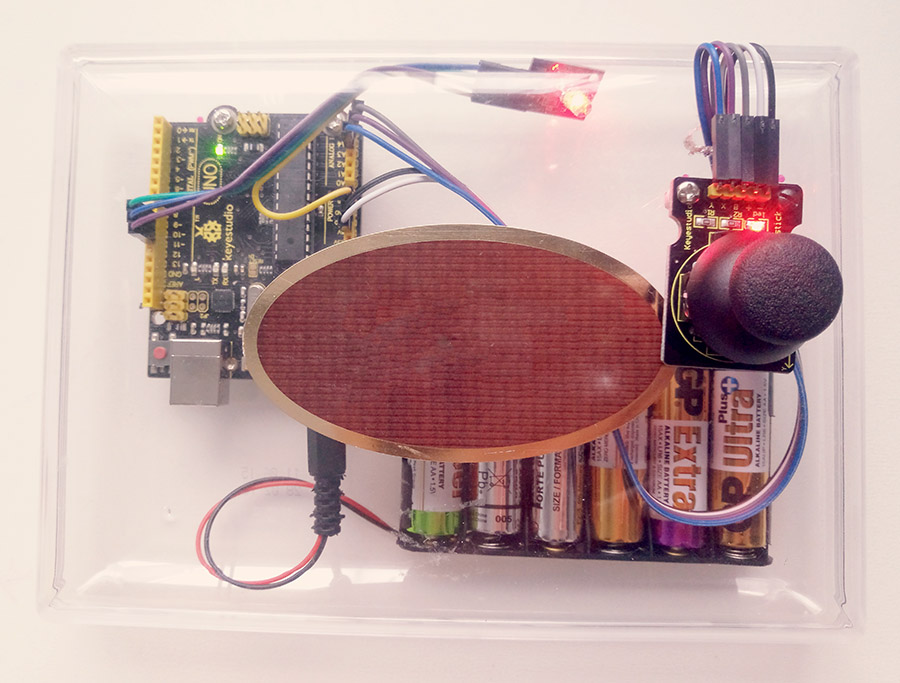
В качестве корпуса для прибора была использована коробка от конфет. В неё, на латунных стоечках, встроен микроконтроллерный модуль Arduino UNO, который и будет управлять трёхцветным (сверхъярким) светодиодом. Там же поместился футляр для элементов питания АА, причём отлично подошли уже прилично потрёпанные батарейки от радиоуправляемой машинки – вообще, они были приготовлены к утилизации.
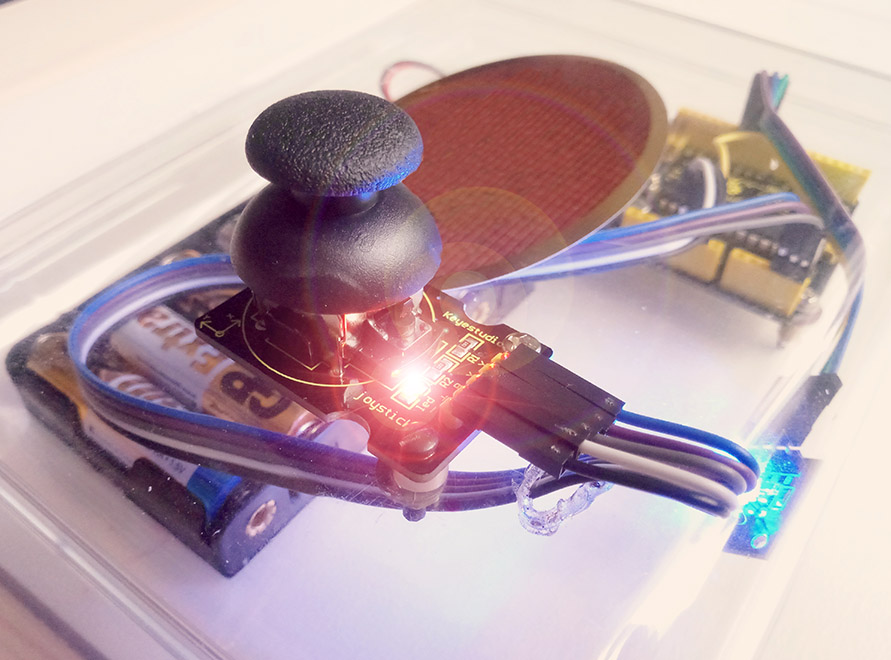
Внезапно родилась идея, а нельзя ли как-то дополнительно управлять светильником? На глаза попался миниатюрный джойстик. Да, именно то, что нужно!
В результате светильник плавно меняет цвета красный-зелёный-голубой, но при нажатии на кнопку джойстика переходит в режим ручного управления (в котром уровень яркости каждого цвета определяется положением рукоятки джойсктика). Повторное нажатие на кнопку приводит к выходу из режима ручного управления.
Текст программы изначально был позаимствован из открытых источников, но затем сильно модифицирован. Получился более мягкий и нежный ночной светильник.
const int pinRed = 11;
const int pinGreen = 9;
const int pinBlue = 10;
const int swPin = A5;
const int pinX = A4; // X
const int pinY = A3; // Y
const int ledPin = 13;
boolean ledOn = false; // текущее состояние кнопки
boolean prevSw = false; // предыдущее состояние кнопки
void setup() {
pinMode(ledPin, OUTPUT);
pinMode(pinRed, OUTPUT);
pinMode(pinGreen, OUTPUT);
pinMode(pinBlue, OUTPUT);
pinMode(pinX, INPUT);
pinMode(pinY, INPUT);
pinMode(swPin, INPUT);
digitalWrite(swPin, HIGH); // включаем встроенный подтягивающий резистор
}
boolean isLedOn() { // ОПРЕДЕЛЯЕМ НАЖАТИЕ КНОПКИ
if (digitalRead(swPin) == HIGH && prevSw == LOW) {
ledOn = !ledOn;
prevSw = HIGH;
}
else prevSw = digitalRead(swPin);
digitalWrite(ledPin, ledOn); // включаем светодиод на пине 13
return ledOn;
}
void CtlMode() { // РЕЖИМ "Ручное управление"
int X = analogRead(pinX); // считываем положение джойстика
int Y = analogRead(pinY);
int BLUE = map(Y, 000, 1023, 0, 255); // маппинг значений
int GREEN = map(X, 512, 1023, 0, 255);
int RED = map(X, 511, 0, 0, 255);
analogWrite(pinRed, RED); // включение каналов R,G,B
analogWrite(pinGreen, GREEN);
analogWrite(pinBlue, BLUE);
}
void DemoMode() { // РЕЖИМ "Демонстрация"
for (int i=0; i <= 255; i ) {
if (isLedOn()) { break; } // при нажатии кнопки выходим из цикла
analogWrite(pinRed, i); // работает канал RED
analogWrite(pinGreen, 0);
analogWrite(pinBlue, 0);
delay(7);
}
for (int i=255; i >= 0; i--) {
if (isLedOn()) { break; } // при нажатии кнопки выходим из цикла
analogWrite(pinRed, i); // работает канал RED
analogWrite(pinGreen, 0);
analogWrite(pinBlue, 0);
delay(7);
}
for (int i=0; i <= 255; i ) {
if (isLedOn()) { break; } // при нажатии кнопки выходим из цикла
analogWrite(pinRed, 0);
analogWrite(pinGreen, 0);
analogWrite(pinBlue, i); // работает канал BLUE
delay(7);
}
for (int i=255; i >= 0; i--) {
if (isLedOn()) { break; } // при нажатии кнопки выходим из цикла
analogWrite(pinRed, 0);
analogWrite(pinGreen, 0);
analogWrite(pinBlue, i); // работает канал BLUE
delay(7);
}
for (int i=0; i <= 255; i ) {
if (isLedOn()) { break; } // при нажатии кнопки выходим из цикла
analogWrite(pinRed, 0);
analogWrite(pinGreen, i); // работает канал GREEN
analogWrite(pinBlue, 0);
delay(7);
}
for (int i=255; i >= 0; i--) {
if (isLedOn()) { break; } // при нажатии кнопки выходим из цикла
analogWrite(pinRed, 0);
analogWrite(pinGreen, i); // работает канал GREEN
analogWrite(pinBlue, 0);
delay(7);
}
}
void loop() { // если нажата кнопка и горит светодиод на пине 13, включаем режим "Ручое управление"
if (isLedOn()) CtlMode();
else DemoMode(); // иначе включаем демонстрационный режим
}
Когда вся конструкция была опробована на рабочем столе, пришло время встраивать её в квартиру. Диод удачно вписывается в нишу, чтобы световой поток падал на стену, тогда комната будет освещена лишь отражённым светом. Яркости вполне хватает в ночное время, даже с избытком. Провода от коробки до диода удлинены, теперь можно разместить джойстик на прикроватной тумбочке.
§
Акселерометр ADXL345 отлично подходит для измерения статического ускорения свободного падения, если стоит задача по измерению угла наклона, а также подходит для измерения динамического ускорения, обусловленного движением или ударом. Высокая разрешающая способность (4 mg/LSB) позволяет измерять изменение наклона менее 1 градуса.
Собранное устройство работает следующим образом. Акселерометр ADXL345, работающий в диапазоне -16g и имеющий разрешение 13-бит, отправляет информацию о положении на микроконтроллерный модуль по шине I2C (может работать и по SPI). Микроконтроллер декодирует данные, полученные от акселерометра, затем выполняет преобразование, используя специализированную функцию atan2.
Затем формируется управляющее воздействие на серво-мотор. Важной особенностью является отсутствие библиотек для серво-мотора.
Тестовый листинг программы приведён ниже.
/*
Подключение акселерометра по шине I2C:
VCC: 5V
GND: ground
SCL: UNO SCL (А5?)
SDA: UNO SDA (А4?)
*/
#include <Servo.h>
Servo motor; // Определяем имя серво-привода
#include <Math.h> // Вроде, нужна для atan2
#include <Wire.h>
// Registers for ADXL345
#define ADXL345_ADDRESS (0xA6 >> 1) // address for device is 8 bit but shift to the
// right by 1 bit to make it 7 bit because the
// wire library only takes in 7 bit addresses
#define ADXL345_REGISTER_XLSB (0x32)
float Angle; // угол поворота мотора
float prev_Angle; // временная переменная для угла
float value; // промежуточное значение Y
int accelerometer_data[3];
// void because this only tells the chip to send data to its output register
// writes data to the slave's buffer
void i2c_write(int address, byte reg, byte data) {
// Send output register address
Wire.beginTransmission(address);
// Connect to device
Wire.write(reg);
// Send data
Wire.write(data); //low byte
Wire.endTransmission();
}
// void because using pointers
// microcontroller reads data from the sensor's input register
void i2c_read(int address, byte reg, int count, byte* data) {
// Used to read the number of data received
int i = 0;
// Send input register address
Wire.beginTransmission(address);
// Connect to device
Wire.write(reg);
Wire.endTransmission();
// Connect to device
Wire.beginTransmission(address);
// Request data from slave
// Count stands for number of bytes to request
Wire.requestFrom(address, count);
while (Wire.available()) // slave may send less than requested
{
char c = Wire.read(); // receive a byte as character
data[i] = c;
i ;
}
Wire.endTransmission();
}
void init_adxl345() {
byte data = 0;
i2c_write(ADXL345_ADDRESS, 0x31, 0x0B); // 13-bit mode - 16g
i2c_write(ADXL345_ADDRESS, 0x2D, 0x08); // Power register
i2c_write(ADXL345_ADDRESS, 0x1E, 0x00); // X
i2c_write(ADXL345_ADDRESS, 0x1F, 0x00); // Y
i2c_write(ADXL345_ADDRESS, 0x20, 0x05); // Z
// Проверка работоспособности
i2c_read(ADXL345_ADDRESS, 0X00, 1, &data);
if (data == 0xE5)
Serial.println("It works well!");
else
Serial.println("Failure... :(");
}
void read_adxl345() {
byte bytes[6];
memset(bytes, 0, 6);
// Чтение шести байтов из ADXL345
i2c_read(ADXL345_ADDRESS, ADXL345_REGISTER_XLSB, 6, bytes);
// Распаковка данных
for (int i = 0; i < 3; i) {
accelerometer_data[i] = (int)bytes[2 * i] (((int)bytes[2 * i 1]) << 8);
}
}
void setup() {
motor.attach(9); // Прицепили серво-мотор (9 or 10)
Wire.begin();
Serial.begin(9600);
for (int i = 0; i < 3; i) {
accelerometer_data[i] = 0;
}
init_adxl345();
}
void react() {
// Теперь посылаем данные в мотор
// Angle = map(value, 0, 1.0, 0, 180); // диапазон акселерометра отображается на 0..180 или 0..20 градусов
Angle = value * 180.0;
// Angle = constrain(Angle, 1, 180); // ограничиваем значения диапазоном от 1 до 180
Serial.print("t");
Serial.print("Угол: ");
Serial.print(Angle);
Serial.println("t");
if (Angle != prev_Angle)
{
motor.write(Angle); // установить угол поворота мотора
prev_Angle = Angle; // запомнить текущий угол
}
}
void loop() {
read_adxl345();
Serial.print("ACCEL: ");
Serial.print(float(accelerometer_data[0]) * 3.9 / 1000); // 3.9mg/LSB scale factor in 13-bit mode
Serial.print("t");
Serial.print(float(accelerometer_data[1]) * 3.9 / 1000);
Serial.print("t");
Serial.print(float(accelerometer_data[2]) * 3.9 / 1000);
Serial.print("n");
// value = float((accelerometer_data[1]) * 3.9 / 1000);
value = atan2(float((accelerometer_data[1]) * 3.9 / 1000), float((accelerometer_data[0]) * 3.9 / 1000));
if ( (value > 0) && (value < 1.0)) {
react ();
}
delay(100);
}
§
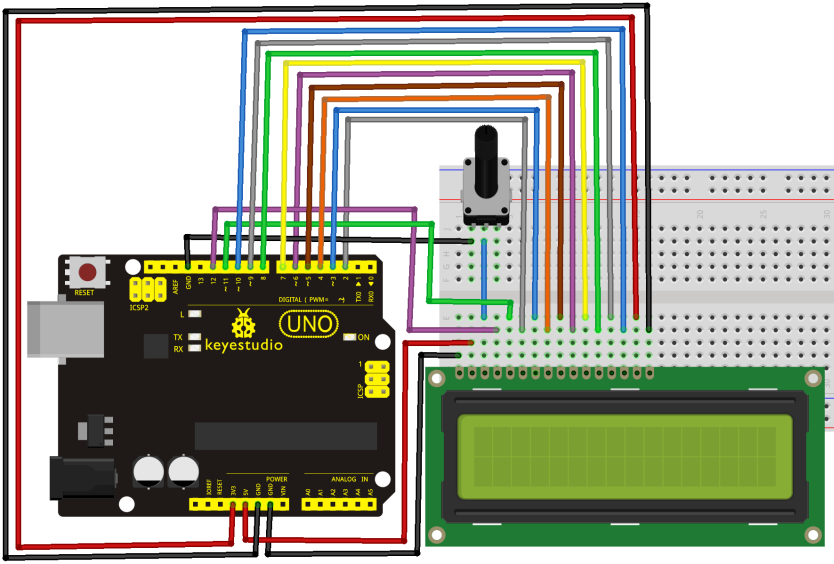
Типовые характеристики дисплея следующие
Display Capacity: 16 × 2 characters.
Chip Operating Voltage: 4.5 ~ 5.5V.
Working Current: 2.0mA (5.0V).
Optimum working voltage of the module is 5.0V.
Character Size: 2.95 * 4.35 (W * H) mm.
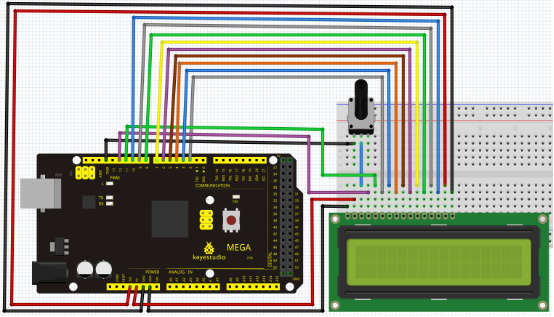
Схема подключения к микроконтроллерным модулям Arduino Uno и Mega 2560 выглядит следующим образом.
Листинг программы для тестов можно использовать следующий
/* __________________
1602 LCD 8-bit bus control
__________________ */
int DI = 12;
int RW = 11;
int DB[] = {3, 4, 5, 6, 7, 8, 9, 10}; // use array to select pin for bus
int Enable = 2;
void LcdCommandWrite(int value) {
// define all pins
int i = 0;
for (i = DB[0]; i <= DI; i ) // assign value for bus
{
digitalWrite(i, value & 01); // for 1602 LCD, it uses D7-D0( not D0-D7) for signal identification; here, itΓÇÖs used for signal inversion.
value >>= 1;
}
digitalWrite(Enable, LOW);
delayMicroseconds(1);
digitalWrite(Enable, HIGH);
delayMicroseconds(1); // wait for 1ms
digitalWrite(Enable, LOW);
delayMicroseconds(1); // wait for 1ms
}
void LcdDataWrite(int value) {
// initialize all pins
int i = 0;
digitalWrite(DI, HIGH);
digitalWrite(RW, LOW);
for (i = DB[0]; i <= DB[7]; i ) {
digitalWrite(i, value & 01);
value >>= 1;
}
digitalWrite(Enable, LOW);
delayMicroseconds(1);
digitalWrite(Enable, HIGH);
delayMicroseconds(1);
digitalWrite(Enable, LOW);
delayMicroseconds(1); // wait for 1ms
}
void setup (void) {
int i = 0;
for (i = Enable; i <= DI; i ) {
pinMode(i, OUTPUT);
}
delay(100);
// initialize LCD after a brief pause
// for LCD control
LcdCommandWrite(0x38); // select as 8-bit interface, 2-line display, 5x7 character size
delay(64);
LcdCommandWrite(0x38); // select as 8-bit interface, 2-line display, 5x7 character size
delay(50);
LcdCommandWrite(0x38); // select as 8-bit interface, 2-line display, 5x7 character size
delay(20);
LcdCommandWrite(0x06); // set input mode
// auto-increment, no display of shifting
delay(20);
LcdCommandWrite(0x0E); // display setup
// turn on the monitor, cursor on, no flickering
delay(20);
LcdCommandWrite(0x01); // clear the scree, cursor position returns to 0
delay(100);
LcdCommandWrite(0x80); // display setup
// turn on the monitor, cursor on, no flickering
delay(20);
}
void loop (void) {
LcdCommandWrite(0x01); // clear the screen, cursor position returns to 0
delay(10);
LcdCommandWrite(0x80 3);
delay(10);
// Show welcome message
LcdDataWrite('W');
LcdDataWrite('e');
LcdDataWrite('l');
LcdDataWrite('c');
LcdDataWrite('o');
LcdDataWrite('m');
LcdDataWrite('e');
LcdDataWrite(' ');
LcdDataWrite('t');
LcdDataWrite('o');
delay(10);
LcdCommandWrite(0xc0 1); // set cursor position at second line, second position
delay(10);
LcdDataWrite('M');
LcdDataWrite('G');
LcdDataWrite('T');
LcdDataWrite('U');
LcdDataWrite('-');
LcdDataWrite('w');
LcdDataWrite('o');
LcdDataWrite('r');
LcdDataWrite('k');
LcdDataWrite('s');
LcdDataWrite('h');
LcdDataWrite('o');
LcdDataWrite('p');
delay(3300);
LcdCommandWrite(0x01); // clear the screen, cursor returns to 0
delay(10);
LcdDataWrite('I');
LcdDataWrite(' ');
LcdDataWrite('a');
LcdDataWrite('m');
LcdDataWrite(' ');
LcdDataWrite('a');
LcdDataWrite(' ');
LcdDataWrite('b');
LcdDataWrite('o');
LcdDataWrite('s');
LcdDataWrite('s');
delay(3000);
LcdCommandWrite(0x02); // set mode as new characters replace old ones, where there is no new ones remain the same
delay(10);
LcdCommandWrite(0x80 5); // set cursor position at first line, sixth position
delay(10);
LcdDataWrite('V');
LcdDataWrite('.');
delay(220);
LcdDataWrite('E');
delay(220);
LcdDataWrite('.');
delay(220);
LcdDataWrite(' ');
LcdDataWrite('D');
delay(220);
LcdDataWrite('r');
delay(220);
LcdDataWrite('a');
delay(220);
LcdDataWrite('c');
delay(220);
LcdDataWrite('h');
delay(5000);
}
После прошивки можем наблюдать, что на дисплее отображается текст

В результате видим пример работы жидкокристаллического дисплея

Очевидным недостатком данного решения является крайне интенсивное использование линий ввода-вывода микроконтроллера или микроконтроллерного модуля. Для снижения количества используемых выводов можно рекомендовать подключение по 4-битной шине.





 купить по привлекательной цене 46990 руб. в Москве")