

Делаем топливный бак
Доброго времени суток, хочу поделится конструкцией и постройкой топливного бака для кордовых моделей самолетов.
Есть у меня самолетик для тренировок, только без бака, бак был снят и поставлен на другой.

Бак будет выполнен из жести, так как она хорошо паяется.
Чистые стенки без краски загибайте во внутрь. 
По линии загибаю.
Так получилось.
Таким самим методом, по линии загибаю боковые ушки. Ушки идут во внутрь на 1мм для шва пайки.
Перед пайкой, зачистить место пайки.
Паять паяльником 65-100 ват, чтобы прогреть материал, и сделать ровный и качественный шов пайки.
После пайки загибаю по линии, смотрите на фото ниже.
Вот так получилось.
Паяем.
После пайки сверлю отверстие, под трубку подачи топлива к мотору. (Отверстие диаметром как трубка)
Еще одно отверстие под трубку для заправки бака.
Трубку использую из термореле от холодильника (трубка медна луженая).
Растояние в баке между концом трубки и стенкой должно быть не менее 3мм. 
Место где будет паятся трубка зачистить, место пайки трубки тоже.

Трубку согнул в направлении ДВС.
Внутри бака трубку припаять к стенке.
Трубка для дренажа в этом баке не нужна в отличии от тех которые стоят на радиомоделях, потому что в полете по кругу, топливо прижимается к стенке бака в итоге топливо находится в заднем углу, а воздух во внутрь поступает через заправочную трубку.
Так само паяю трубку для заправки.
После пайки трубок, бак промить и высушить.
Тогда паяем остальные стенки.
Вот бачок почти готов, осталось крепление к фюзеляжу и проверка на вакуум. Делаем крепление, пластину шириной 20мм перегибаю пополам Чтобы было прочнее.
Делаю отверствия.
Режу пополам, изгибаю как на фото ниже.
Место пайки надо зачистить, паяю крепление. 
После припайки крепления, проверяю на вакуум, если вакуума нет ищем щель паяем.
Проверить бак на утечку легко, одну трубку закрываем, а из другой высмактывем воздух и закриваем языком, если язык присосался то все хорошо.
Желательно покрасить бак, чтобы не было коррозии металла.
Бак должен быть закреплен строго по цетру с двигателем.
Отверстия в баке под трубки можно сделать после вырезания заготовки:
Крепление к фюзеляжу можно припаять с верху:
Между баком и фюзеляжем, желательно положить резиновою подкладку, чтобы уменшить вибрацию на бак:
Почему я поздно пишу статью? приезжаю с работы вечером поздно, занимаюсь постройкой самолетов. Отвечаю на коменты на работе с нетбука.
Спасибо за просмотр.
Изготовление планера из потолочной плитки
ИЗГОТОВЛЕНИЕ ПЛАНЕРА ИЗ ПОТОЛОЧНОЙ ПЛИТКИ
Королихин В.В., педагог дополнительного образования, Станция юных техников, Глубоковский район, Восточно-Казахстанская область.
Эта модель, разработана для детей и подростков начинающих, заниматься в кружках технического творчества.
На этой модели они отрабатывают навыки работы, балансировки модели и запуска.
С этой моделью можно проводить соревнования.
Начинать работу нужно с изготовления шаблонов.
На чертежах указаны: размеры в миллиметрах и приложена масштабная линейка, стрелками указано, направление волокон материала.
При распечатки чертежей размеры могут не совпадать, поэтому их нужно привести к указанным размерам.
Важны ширина и длинна деталей, радиусы закруглений можно слегка изменить.
Для соединения деталей используют мастер клей, титан.
Пример изготовления шаблона боковины фюзеляжа.
ИЗГОТОВЛЕНИЕ БОКОВИН ФЮЗЕЛЯЖА
Деталь боковины длиннее потолочной плиты, поэтому заготовку склеиваем из двух частей.
Для этого отрезаем вдоль волокон 3 заготовки, ширина 80 мм длинна на всю плиту, одну заготовку разрезаем пополам.
Делаем вырезы под углом
Накладываем короткую заготовку с вырезом, на длинную и выполняем разметку на длинной заготовке.
 вырезаем клин.
вырезаем клин.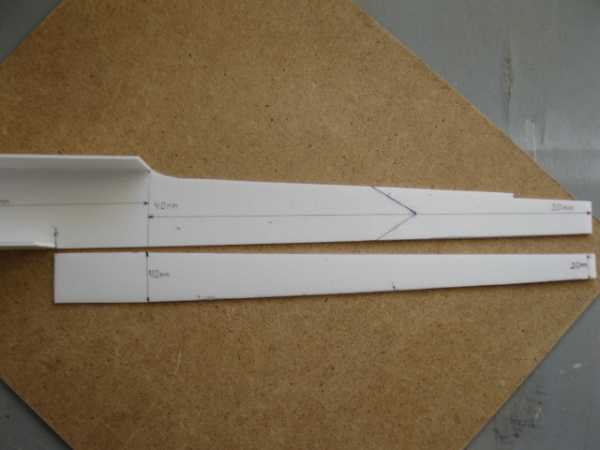 заготовки готовые к склейки.
заготовки готовые к склейки. склеенные заготовки.
склеенные заготовки.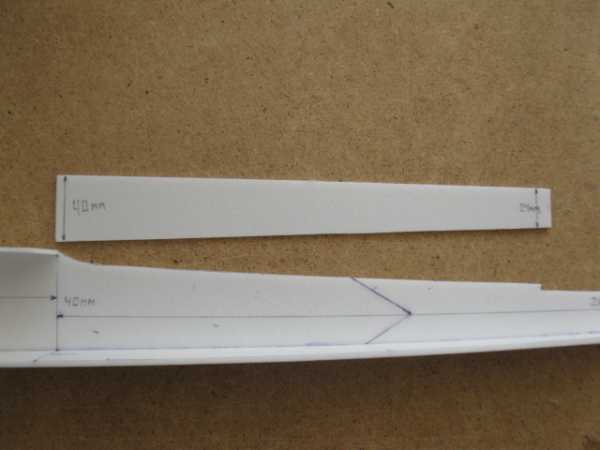 размечаем по шаблону и
размечаем по шаблону и
Вырезаем боковины фюзеляжа.
Готовые боковины, левая и правая.
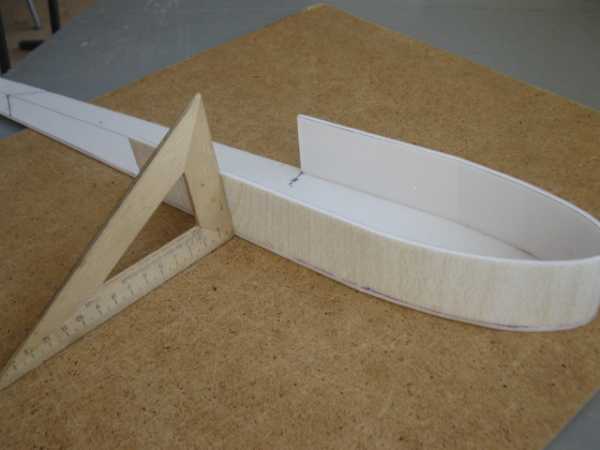
Следующая деталь, полоса шириной 40 мм и длинной на всю плиту,
Изгибается по контуру боковины.
Приклеиваем вставку, контроль с помощью угольника.
Вырезаем следующую вставку и приклеиваем к нижней части боковины.
Верхняя вставка, с широкого конца выгибается по контуру боковины и приклеивается.
Ширина вставок в носовой части 40мм, от верхнего изгиба фюзеляжа до хвостовой части, плавно сужается до 20 мм.
Размеры на боковине фюзеляжа показывают ширину вставки в данном месте. После оклеивания боковины по контуру, в носовую часть вклеивают, пакет пластин из потолочной плитки с отверстием диаметром 30 мм отверстие служит для балансировки планера.
После этого приклеивают вторую боковину.
Для крепления крыла в носовой части устанавливаются две рейки, овального сечения толщиной 6 мм для усиления используются картонные шайбы.
Рейки установлены от верхней кромки на 25мм
Для придания профиля крылу заготовка укладывается меду газетными листами, и закручивается с помощью трубы диаметром 40-50 мм. Закручивание заготовки
Закручивание заготовки
«Уши» крыла после крутки для придания профиля
После придания профиля «уши разрезаются и кромка которой «ухо» приклеивают к крылу шлифуется для придания угла .
Точность сборки крыла проверяют на столе так, кладут крыло на стол и замеряют расстояние от конца «уха» до поверхности стола, расстояние должно быть в пределах 100- 90 мм.
По передней и задней кромке центроплана крыла приклеена рейка три на пять мм.
Размеры центроплана крыла 130 мм и на всю длину плитки вырезается вдоль волокон
Разрезанная заготовка пополам.
Готовый планер в сборе.
 отверстие для балансировки.
отверстие для балансировки.
С боку в носовой части отверстие для балансировки
грузом, после балансировки закрывается заглушкой.
Балансировка выполняется закладкой груза в носовую часть через отверстие. Если при запуске модель задирает нос, нужно добавить груз, резко пикирует, груз уменьшают. Правильно сбалансированная модель должна ровно планировать. Груз фиксируют с помощью клея.
Схематичная модель планера.
 носок планера.
носок планера. общий вид
общий вид хвостовое оперение
хвостовое оперение
Схематичная модель.
Изготавливается на базе крыла от планера описанного выше, вместо фюзеляжа используют рейку 10 на 10 мм длинной 700 мм.
Носок из 10 мм фанеры выполняет функции груза.
По центру крыла приклеен пилон для крепления крыла к фюзеляжу.
Пилон крепится к фюзеляжу с помощью резинок.
Балансировка выполняется перемещением крыла вдоль фюзеляжа.
Носок изготавливается из фанеры толщиной 10мм, шириной 45мм, длинной 180мм.
На чем работают двигатели авиамоделей

На рис. 1 показан двигатель, его главная верхняя (оребренная) часть называется цилиндром;
внутри он имеет гладкую цилиндрическую поверхность, а сверху плотно закрыт пробкой — контрпоршнем. Внутри цилиндра ходит поршень. Он очень хорошо подогнан к цилиндру и герметично закрывает его снизу. Однако это не мешает поршню легко скользить в цилиндре вверх и вниз.
Цилиндр крепится к корпусу (картеру), объединяющему все основные части двигателя. Внутри картера находится коленчатый вал. Его колено соединено с поршнем при помощи шатуна.
При движении поршня вдоль цилиндра шатун вращает коленчатый вал.
Так устроен механизм двигателя. Но что заставляет поршень двигаться?
Представь себе, что в цилиндре двигателя находится смесь паров горючего (например, керосина или спирта) с воздухом, а поршень при этом находится в самом верхнем положении. Если мы ухитримся сжать, а затем поджечь эту смесь, то она сгорит почти мгновенно.
При этом давление в цилиндре из-за сильного нагрева газов резко повысится. Под действием этого давления поршень будет опускаться вниз и передаст движение шатуну, а через него коленчатому валу, который начнет вращаться. Правда, повернется он всего на пол-оборота, так как при дальнейшем вращении поршню пришлось бы двигаться вверх, навстречу давлению газов, а это его бы остановило.
Но каждый раз, как только поршень подойдет к нижнему положению (рис. 2), придуман способ выпускать сгоревшие газы из цилиндра и таким образом уменьшать почти до атмосферного давление над поршнем, а затем наполнять цилиндр новой порцией горючей смеси, снова поджечь и т. д.
В наше время есть много способов делать это. Например, в большинстве автомобильных двигателей один способ, у так называемых дизельных двигателей — другой, а у большинства мотоциклов и в модельных двигателях — третий.
Мы расскажем тебе лишь о третьем способе, так как им пользуются все моделисты. Называется он двухтактным с кривошипно-камерной продувкой. Особенность этого способа заключается в том, что в стенке цилиндра по окружности сделаны отверстия (окна). Когда поршень находится в самом нижнем положении, окна оказываются над поршнем.
Вот и получается, что когда сгоревшие газы давят на поршень, он движется вниз и через шатун вращает коленчатый вал, а когда поршень опустится, он откроет окна в цилиндре и газы вырвутся наружу. Давление в цилиндре упадет, и теперь надо наполнить его свежей горючей смесью для следующего оборота.
Происходит это так: когда поршень от самого нижнего положения начнет двигаться вверх, в картере образуется разрежение, благодаря которому в него (рис. 3) начнет через всасывающий патрубок засасываться воздух. Поперек патрубка проходит тоненькая трубка, называемая жиклером, по которой горючее поступает из бачка.
Для того чтобы регулировать подачу горючего в патрубок, на верхнем конце жиклера имеется винтик с иглой, закручивая который, мы уменьшаем подачу горючего, а отвинчивая, увеличиваем ее. Все вместе это устройство называется карбюратором.
Как мы уже сказали, поршень, двигаясь вверх, засасывает в картер горючую смесь, приготовленную карбюратором. Дойдя до верха, он начнет опускаться, сжимая при этом смесь, находящуюся в картере, так как специальное устройство (золотник) при движении поршня вниз закрывает в картере отверстие, через которое всасывается смесь.
Сжатие смеси в картере продолжается до тех пор, пока поршень своей верхней кромкой не опустится ниже продувочных каналов, проходящих в нижней части цилиндра. Как только это произойдет, смесь, сжатая в картере, устремится по каналам в цилиндр и наполнитего, одновременно она вытеснит из него остатки сгоревших газов.
Теперь только остается рассказать, отчего загорается смесь в цилиндре.
Многим из вас, наверное, приходилось накачивать насосом камеры велосипеда. И вы не могли не заметить, что при этом насос сильно нагревается. Происходит это потому, что двигая поршень насоса, мы сжимаем воздух. В цилиндре двигателя происходит то же самое: поршень, двигаясь вверх, сжимает горючую смесь, и она нагревается тем сильнее, чем сильнее ее сожмут.
Практически в цилиндре двигателя ее сжимают до тех пор, пока она не загорится. Горючее подбирают таким, чтобы оно легко воспламенялось при сжатии. Наиболее подходящим для этого является керосин. Для того чтобы облегчить воспламенение смеси и сделать его надежным, в горючее добавляют сернистый эфир, который чрезвычайно легко загорается и поджигает остальное горючее.
Однако зажечь горючую смесь мало, надо это делать каждый раз в определенном положении поршня в цилиндре. Если смесь зажечь слишком рано, когда поршень еще не дошел до верха, получится обратный удар, коленчатый вал остановится и начнет вращаться в обратную сторону.
Чтобы получить возможность регулировать момент зажигания смеси, дно цилиндра делают подвижным: в цилиндр сверху вставляют контрпоршень, который при помощи винта сверху можно вдавливать внутрь цилиндра. Этим изменяют объем цилиндра и, следовательно, давление в нем, что, в свою очередь, меняет момент зажигания смеси. Обычно на работающем двигателе поворачивают регулировочный винт, пока не добьются наибольшего числа оборотов вала.
В действительности все обстоит несколько сложнее, потому что, кроме правильного выбора момента зажигания, приходится еще подбирать нужный состав горючей смеси (наилучшее соотношение между количеством засасываемого воздуха и количеством горючего).
Дело в том, что смесь горючего с воздухом легко загорается только при определенном соотношении, если оно нарушено, двигатель работать не будет, но что интересно — плохо и когда слишком много горючего в смеси. Поэтому запуск авиамодельных двигателей требует определенного навыка.
Отрывок из книги «Лети модель» Лебединский М.
Кордовые модели F2B | Control line stunt | Aerobatics
Объемная модель ла-5 из потолочки (1:12)
В качестве чертежей для расчета всех размеров и формы деталей использовал вид в трех проекциях с википедии:

Вообще это схема от Ла-7 (изначально я именно его и задумывал), но из внешних различий у этих двух самолетов – только перенесенный назад радиатор на брюхе, который у меня отсутствует. Я даже и сейчас периодически называю свою модель то Ла-5, то Ла-7.
Также мне была неясна точная форма поперечных сечений в разных частях самолета, чтобы сделать правильные шпангоуты. Этот вопрос я решил с помощью найденных чертежей Ла-7 для постройки большой бальзовой модели (на сайте rc-aviation).
Электроника, ТТХ и видео – в конце статьи. Все картинки кликабельны и доступны в большем размере, если нужно.
Начал я с фюзеляжа.








Эти штырьки для лучшей фиксации моторамы (без них было бы не менее прочно, но мне всегда хочется перестраховаться).

Сама моторама из двух склеенных кусочков линейки, т.к. куска фанеры у меня не было. По этой же причине моторама состоит из двух слоев – линейки клеятся на квадратный кусок пластика, чтобы винты вкручивались в мотораму надежнее.



Почему такая странная форма деревянной части моторамы – будет видно дальше.
Фюзеляж пока откладываем, займемся хвостовым оперением. Оно делается из двойной потолочки. Кромки я сошкуривал до склеивания половинок между собой, просто зафиксировав скотчем:

Руль высоты я делал с осевой аэродинамической компенсацией, как на оригинале, но не совсем пропорционально. Для этого части стабилизатора, где будут петли, должны несколько выступать назад, вдаваясь вглубь РВ.

Навеска рулей – на двустороннем скотче (я всегда клею два слоя подряд, т.к. одим мне кажется совсем тонким). Не забываем и про синхронизатор между половинками РВ, его я сделал из канцелярской скрепки. Чтобы его не вырывало из потолочки, края его лучше также прихватить площадками из двухстороннего скотча.

По размаху стабилизатор усиливаем вклеиванием бамбучины и затем приклеиваем вторую половинку.

Получаем такой РВ с компенсаторами:

Далее черед вертикального оперения. Его также усиливаем зубочисткой и куском бамбучины.


Далее все заклеиваем, принцип тот же.

Теперь переходим к сборке крыла. Лонжерон у меня потолочно-линейчатый. Делаем V-крыла, как на оригинале. Деревянная часть склеивается из трех кусков линейки.

Второй лонжерон потоньше и короткий, нужен, в основном, для поддержания V-крыла и увеличения прочности при склеивании двух половинок обшивки.

Вырезаем две половинки крыла и приклеиваем по одной полоске потолочки по передним и задним кромкам.

Прикливаем лонжероны по размеченным линиям сначала к одной половинке, потом к другой, одновременно промазывая стыки обшивки в месте их соединения. Получаем такую заготовку крыла:

Добавляем нервюры:

Ну, и приклеиваем обшивку, притягивая по очереди половинки крыла скотчем к ровной поверхности и придавливая все это в нужных местах книгами. Особенно важно придавить заднюю кромку, чтобы между верхней и нижней обшивкой сзади не было щелей (на фото книг уже нет).

Снова возвращаемся к фюзеляжу. По бокам от моторамы прорезаем отверстия для обдувки аккумулятора и регулятора, которые располагаются в отсеке позади моторамы.

Крыло спереди будет вставляться штырем в прорезь, а сзади – притягиваться винтом. Поэтому место под штырь в нижней части фюзеляжа укрепляем:

Решил также сделать отверстия для выхода входящего спереди воздуха наружу (в оригинале это – створки выхлопа от двигателя):


Делаем штырь на крыле с соответствующим укреплением:


В задней части крыла укрепляем место ввинчивания винта. Для этого я вклеивал пластинку из пластика, дополнительно усиливая деталями из бальзы и промазывал это хозяйство поксиполом:


Отверстие под штырь в передней нижней части фюзеляжа:

В фюзеляж вклеиваем две гайки под винт. Для этого я приклеил изнутри пластинку из 2,5-мм бальзы, а чтобы она не прогибалась при затягивании, поперек фюзеляжа приклеил на бальзу еще 8-мм бальзовый уголок. Внутреннюю гайку клеил на поксипол.

Наружную гайку клеил термопистолетом и фиксировал по бокам и сверху бальзой:


В передней части фюзеляжа я добавил полушпангоуты, для более прочной фиксации обшивки:

Также я добавил бальзовые стрингеры в нескольких местах, идущие, однако, не по всей длине фюзеляжа, здесь это видно:

Хвостовое оперение встало на свое место:

Убеждаемся, что все ровно:

Элероны я решил сделать небольшими, но все же большего размера, чем на оригинале. Крепление в крыло – на “классических” петлях из нитки (пластиковыми я тогда еще не пользовался):

Сервомашинки в крыло я ставлю боком, чтобы из крыла торчали только качалки. В этом случае придумал такие крепления (впоследствии для других самолетов придумал гораздо более простую схему):


Сервы внутри фюзеляжа я обычно креплю вот в таких домиках:

Удобство всех этих конструкций в том, что сервы можно всегда открутить.
Прорезаем верхнюю часть фюзеляжа в районе будущей кабины. Здесь будет доступ к сервомашинками хвостового оперения:

Начинаем клеить обшивку. У меня это был первый опыт в изготовлении объемного фюзеляжа из потолочки, в некоторых местах пришлось “попотеть”, но в целом сильных затруднений это не вызвало. Прежде чем гнуть любую часть обшивки, с внешней стороны ее нужно обклеивать скотчем, чтобы не лопнула. А в местах изгиба изнутри нужно аккуратно продавливать многочисленные линии, я это делал ребром минусовой отвертки.

Перед полной зашивкой задней части фюзеляжа устанавливаем тяги к хвостовым рулям. Я делал их из 1-мм проволоки ОВС, в местах пересечения обшивки и шпангоутов проволока проходит в боуденах из коротких кусочков от ватных палочек.



Особо трудные и большие куски обшивки я при сгибании прогревал феном, чтобы лучше зафиксировать их форму, так приклеивать их значительно проще:


Приклеиваем обшивку в передней части и получаем такой вот бочонок:

Оформляем “воздухоотводы”:

Ошкуриваем всю тушку, вот так она выглядит в предварительной сборке (еще без зализов крыла):


Снизу отверстие для доступа к аккумулятору, регулю и приемнику. Специальных люков я делать не стал, единственное небольшое неудобство – для замены аккума надо снимать крыло, но это сделать очень быстро.

Да, еще одна важная часть – капот. Пеноплекса в то время у меня еще не было и в помине. А пенопласт, который был, показался слишком мягким и нежным. Поэтому капот я решил делать, склиевая между собой “блины” из потолочки. Все это хозяйство ошкурил на дрели, в итоге получилось неплохо:

Внутри прорезал отверстие и тоже его ошкурил. Крепится капот на магнитах, которые вклеиваются в бальзовое кольцо, а положение фиксируется четырьмя штырями из бамбучин. На фюзеляже делается ответное кольцо с металлическими пластинками (из кофейной банки) и ответными отверстиями под штыри:

Так капот предварительно смотрится на фюзеляже, который уже частично оклеен тонкой бумагой на ПВА (на тот момент нашлась только оранжевая =) ):

После оклейки и по возможности выравнивания всех неровностей слоями бумаги и ПВА (разведенного водой), фюзеляж как следует ошкуривается, и дальше в дело вступают краски:

В качестве цветовой схемы использовал фото музейного образца Ла-7, на котором летал Иван Никитович Кожедуб, легендарный советский летчик-асс, летавший на нем во время Великой Отечественной войны.

Правда, звезд и орденов на самолете я так и не нарисовал, к сожалению…
В отличие от этой окраски я однотонный темный цвет заменил на серо-зеленые пятна в стиле “хаки”:

Пришлось поработать над цветами, смешивая разные краски, и подобрать нужные мне зеленый, серый и голубой цвета.




На этих фото покрытие еще матовое. Но после полной окраски я покрыл весь его двумя слоями акрилового глянцевого лака, выглядеть стал ничуть не хуже, тут он уже с коком и куском “кресла” в кабине пилота:

Как не сложно заметить, у самолета все еще отсутствует фонарь кабины, болванку я под него сделал давно, но собраться с мыслями, чтобы изготовить фонарь и его крепление к фюзеляжу, никак не могу. Так и летал без фонаря…
Спасибо за Ваше терпение, если Вы домотали все фотографии до конца. Здесь я выкладываю видео первого полета.
Конечно, для второй модели это не самый удачный выбор. Хотя поскольку у меня полет состоялся больше чем через год от начала постройки, я успел до этого полетать еще на трех моделях, самой нетривиальной и капризной из которых оказалось летающее крыло. Так что некоторый опыт в пилотировании не-тренеров у меня уже был. Самолет получился очень резвым и быстрым, временами мне было трудно справится с управлением, тем не менее за все три полета он вернулся на землю только три раза и не разу не встретился с планетой “по ошибке” 🙂 Свой навык я еще налетаю и обуздаю его за лето как следует.
Характеристики модели такие:
– размах 82 см
– длина с коком 72 см
– площадь крыла 9,2 дм2
– полетный вес 570 г
– нагрузка на крыло 62 г/дм2
Электроника:
Кок был с цанговым зажимом, но я его приспособил под крепление на обычный пропсейвер с резинками, чтобы обезопасить винт при падениях (как показала практика – не напрасно).
Очень понравилось, как звучит в полете этот мотор, звук просто супер по сравнению с 2205С.
На 3 банках движок выдает на стенде тягу в 600-650 г, при токе в 13-14 А. Тяговооруженность получается немного более единицы, для “веселых” полетов хватает 🙂
Спасибо за просмотр!
С уважением,
Илья
Уроки по самостоятельной сборке р/у авиамодели из потолочной плитки. от раскройки до облета!
Мелкому год и девять месяцев.
Приходят с папой с прогулки. Лицо в грязи. Папа говорит: наклонился камушек подобрать и упал.
К концу апреля мелкий стал шататься при ходьбе.
А потом не смог ложку до рта донести. Промахивался.
Веду к неврологу. Осматривает. Все в порядке, вот, попейте витамины. Через две недели приходите.
Возвращаюсь домой. Интернет. Лучший детский невролог. Лучший диагност. Работает в городской поликлинике. Звоню.
Без направления не примут, только платно и по согласованию с врачом. В очередь не запишем, у вас свой невролог есть в городе. Как хотите.
Выясняю расписание. В сумку пару запасных памперсов, колготки, футболку. На автобус и в областной центр. К тому самому диагносту. На колени встану, лишь бы принял.
Приехали за час до начала приема. В коридоре народ собирается. Приходит врач, открывает кабинет. Я к нему.
Мы вот оттуда-то. Пожалуйста! Шаткость походки, нарушение мелкой моторики.
Врач оглядывает длиннющую очередь.
– Заходите!
Бегло осматривает, внимательно слушает.
– Гидроцефальная форма головы. Как пропустили?
– Не знаю. Невролог осматривал. Говорил все в порядке.
– Я вам выпишу направление в областную. Пугать не хочу, но, скорее всего, новообразование в мозгу. Может, что-то другое. Ложитесь в больницу сегодня.
– Спасибо. Оплатить в кассу?
– Денег не надо. Вот направление. Поставьте в регистратуре печать.
В неврологию взяли быстро. КТ через неделю, 25 мая. Очередь.
Мелкому весело. Чего грустить? Мама рядом. Отец привез вещи и игрушки. В палате отличные ребята. Только ходить все труднее. Все время за ручку. Один раз упустила, не углядела, упал, ударился головой. Не плакал.
25 мая.
Мелкому вкололи седативное. На реанимобиле отвезли из детской больницы во взрослую на КТ.
Страшно. Уложили мелкого в аппарат, поставили рядом табуреточку. Садитесь, мамочка, следите за дыханием. Если что пойдёт не так, машите в окошко.
Результат через 20 минут. Опухоль. Большая. Надо срочно оперировать.
Я помню, как шла по коридору, полному людей. Несла на руках спящего мелкого и плакала. Без рыданий, без истерик. В голове пусто как в бочке. Лицо спокойное, расслабленное. Только слёзы текут. У меня такое редко. Обычно, когда плачу, морщусь вся, подбородок трясётся, нос раздувается. Стыдно было плакать в голос. Ненавижу на людях реветь.
Получили квоту. Приехали с реанимацией в Питер. Сто лет там не была.
Привожу мелкого в ординаторскую, отдаю документы врачу. Тот снимки смотрит, на меня смотрит, на мелкого смотрит:
– Где ребёнок?
Я глазами хлопаю, на мелкого указываю. Врач возмущённо:
– Это что за цирк? Чьи снимки?
Я не понимаю в чём дело. Снова на ребёнка показываю:
– Это его.
– Если это его снимки, то ходить с такой опухолью он не должен!
Наверное, поэтому к нам было повышенное внимание.
Наверное, поэтому врач рискнул сделать две операции почти подряд. Шунт и через неделю удаление опухоли. Хотя нет. Не поэтому. Как объяснил доктор, если не поторопиться, мелкий ослепнет от излишнего внутричерепного давления.
Ещё врач объяснил, что обычно так не делают. Что между операциями должно пройти как минимум две недели реабилитации. Но нам нельзя тянуть. Поэтому неделя. Но риски очень высокие. Я сказала, что доверяю ему. Он ответил: а зря.
Подписала документы. Согласие на анестезию, вмешательство. Не знаю почему, но мне все время говорили, что риски очень высокие, что я должна это понимать. Я улыбалась и говорила, что согласна, потому что вариантов нет. Они смотрели на мою улыбку и повторяли, что я должна понимать. Я понимала. Просто все, что могла выплакать, выплакала в первую ночь в туалете больницы. Впечатала ладони в стены и выла. Как зверь, но тихо, в себя. Чтобы не слышал никто. А наутро косплеила нашего врача-корейца. И самой с того смешно было.
Брила мелкого сама. Больничной бритвой. Где-то дома в пакетике лежат его золотые ангельские кудри. Без волос сразу стало видно, что голова у мелкого большущая, чуть раздутая над ушами.
Увезли.
Провожала до лифта, держала за руку. Улыбалась, шутила. Внутри горело всё. Сердце словно жгли кислотой. А я улыбалась. Нельзя, чтобы боялся. Нельзя, чтобы заметил мамин страх. Важно, чтобы уходил с улыбкой. Важно! Важно…
Может быть, я видела его живым в последний раз.
Пришёл психолог. Он приходил к каждой маме или бабушке, чьи дети и внуки уезжали в операционную. Успокаивал. Заставлял покушать. Я улыбалась. Сказала, что поела. Не соврала, кстати. Это папа приучил: есть надо, чтобы были силы бороться.
Помню, заболела гнойной ангиной. Горло болело страшно! Не то что есть, глотать было больно. Папа усадил за стол. Поставил тарелку горячего супа. Ешь!
Не могу!
Ешь! Не будешь есть, не будет сил выздороветь!
И я ела. Ревела в тарелку и ела. Потому что надо быть сильной.
Быть сильной помогала валерьянка. Семь таблеток утром. Семь вечером. Как-то доктор вызвал к себе в кабинет. С вопросом, почему я выбиваюсь, скажем так, из нормы. Все мамочки как-то переживают, ходят грустные, плачут. А я бегаю по отделению, улыбаюсь, поднимаю настроение всем. Подозрительно это! Я честно призналась, что на колесах сижу. Пью валерьянку горстями. Расслабился. Сказал, чтобы не перебарщивала.
Мелкий выжил. Вторая операция шесть часов. Вроде бы с половиной. Останавливалось сердце один раз. Ничего, завели. Можно посещать в реанимации.
Кровати в реанимации для больших. Мелкого привязывали к бортикам кусочками ткани, чтобы не выдернул подключичку, или вставленные в голову трубочки отвода жидкости. Две штуки. Кушать мелкий не мог. Почти всё, чем кормила, выходило наружу. Поила с чайной ложки. По ложечке в пять минут. Иначе как с едой. Ну ничего. Потом хуже было… Правда, тогда я не знала, что будет. И думала, что хуже быть не может. Ха-ха.
Через неделю вернули в палату. Через полтора месяца выписали.
Простите.


, цена 4600 руб")




