

- Три основных способа калибровки
- Виды калибровок
- Для чего нужна калибровка квадрокоптера перед полетом
- Как калибровать квадрокоптер syma
- Как настроить?
- Как пожелание…
- Как триммировать квадрокоптер. инструкция
- Калибровка дрона.
- Краткий гайд по квадрокоптерам для fpv. часть четвёртая – поговорим о мозгах?
- Настройка камеры дрона
- Первый запуск квадрокоптера
- Режимы
- Сборка квадрокоптера
- Синхронизация с пультом
- Советы и типичные ошибки
- Триммирование квадрокоптера
Три основных способа калибровки
Первый и, пожалуй, самый простой способ – это механический. В этом случае необходимо подкрутить регуляторы тяги. Подходит для тех случаев, когда отклонение от оси не очень велико. После подкручивания регулятора поднимите мультикоптер в воздух, если отклонение от оси осталось – повторите действие. Так до тех пор, пока дрон не полетит ровно по оси.
Автоматический способ относится к процессу триммирования. Здесь необходимо произвести настройку с ПУ. Подходит этот способ для тех случаев, когда триммер нужно сместить на более чем пять позиций. Перед началом калибровки изучите инструкцию.
Программный способ подходит для калибровки плат типа Ardupilot. Это вариант самостоятельного ввода необходимых параметров посредством программного обеспечения и подключения дрона к ПК. Обычно, такой процесс необходим для первой калибровки самостоятельно собранного дрона.
Алгоритм процесса программного способа:
- Включить пульт управления (его необходимо оттриммировать заранее). Ручку газа нужно выставить на максимум.
- Включить автопилот: подключить аккумулятор (Li-Po) к разъему Power-модуля.
- После начала мигания АРМ синим и красным светодиодами (готовность к дрона к калибровке при последующем включении) отключить батареют от Power-модуля.
- Включить питание. Вы услышите стандартный звуковой сигнал регуляторов (по количеству элементов в батареи) и двойной короткий сигнал – подтверждение калибровки по максимальному газу.
- Перевести ручку газа в положение минимум. Услышите одиночный длинный сигнал – подтверждение по минимальному газу.
- Проверить работоспособность двигателей.
- Сбросить газ на минимум и выключить питание Ardupilot.
Виды калибровок
Существует два способа настройки, триммирования и калибровки квадрокоптеров:
- Механический. Если отклонения дрона в полете совсем незначительные, можно вручную подкрутить регулятор тяги, расположенный между сервоприводом и тарелкой конструкции.

Механическое триммирование проводят на земле, а после пробного полета при необходимости повторяют - Автоматический. Если дрон отклоняется от курса сильно и заметно, его настраивают при помощи пульта. Специальный триммер переводят в положение, противоположное крену аппарата.

Автоматическую настройку осуществляют непосредственно в воздухе
Перед автоматической калибровкой дрона рекомендуется внимательно изучить инструкцию, чтобы разобраться в устройстве пульта управления и самого аппарата.
Для чего нужна калибровка квадрокоптера перед полетом
Полет дрона осуществляется за счет ускорения и замедления вращения пропеллеров, подчиняясь командам с пульта, квадрокоптер меняет направление или зависает на месте. Данные о собственной ориентации в пространстве он получает от датчиков — гироскопов и акселерометров.

Большинство дронов продаются полностью настроенными и готовыми к полету. Однако в процессе транспортировки заводские установки часто сбиваются. В результате дрон получает неверную информацию от собственных датчиков, начинает произвольно менять направление или кувыркаться в воздухе. Для устранения подобных проблем при первом запуске рекомендуется выполнить настройку пидов квадрокоптера (PID).
Как калибровать квадрокоптер syma
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру. Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора.
При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю. Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.

Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
- при вращении влево триммер под левым джойстиком управления нужно медленно сдвигать вправо до момента прекращения подобного движения и на оборот;
- при движении аппарата вперед или назад нужно передвигать триммер под правым джойстиком также в противоположном направлении.
Обратите внимание, что передвигать триммер нужно очень медленно из-за риска перестараться и необходимости откалибровать его уже в обратном направлении.
Как настроить?
Процесс настройки дрона достаточно сложный и включает в себя множество нюансов, поэтому нужно быть крайне аккуратным. Особенности настройки зависят от целого ряда факторов, среди которых важное значение имеет тип калибровки. Наиболее простой на сегодняшний день считается именно ручная настройка. Для ее проведения достаточно будет найти в инструкции, где находятся крепежные детали для регулировки.
Подкрутив их в определенную сторону, можно будет изменить параметры коптера.
Процедура занимает достаточно много времени и включает в себя следующие этапы.
- Включение устройства и ожидание его сопряжения с пультом управления.
- Осуществление проверки по сценарию, который рекомендован производителем.
- Подкручивание регулировочного болта на определенной оси.
- Повторение проверки и фиксация полученного результата.
- Настройка квадрокоптера до тех пор, пока не будет получен нужный результат.
Основной минус состоит в том, что при помощи ручного метода достаточно трудно добиться идеального результата, однако, избавиться от определенных неточностей управления можно. Если происходит калибровка при помощи специального программного обеспечения, то придется осуществить всего несколько манипуляций. Производители дрона заранее закладывают в пульт ДУ функции, которые автоматически проводят настройку.
Как пожелание…
Не спешите выжать из нового квадрика все соки в первый же день полетов!
Помните, что первые запуски, это для него всего лишь тестирование и проверка работоспособности, а для вас – проверка на выдержку.
Поэтому, не спешите, иначе рискуете разочароваться до того, как новинка принесет вам наслаждение.
Внутренняя система позиционирования дрона основана на работе гироскопа. В зависимости от показаний датчика, электроника автоматически регулирует обороты двигателей машины для поддержки стабильного положения. Система тестируется и запоминает настройки автоматически. Чтобы калибровать квадрокоптер, обычно достаточно:
- поставить устройство на ровную поверхность;
- включить питание или подсоединить аккумулятор;
- дождаться окончания тестирования.
Об окончании калибровки свидетельствует звуковой сигнал или световая индикация. Как делается настройка квадрокоптера, подробно изложено в инструкции по эксплуатации модели. У некоторых дронов процедура может быть сложнее. Например, чтобы откалибровать квадрокоптер, его нужно не только установить на ровную поверхность, но и покрутить в определенном положении по и против часовой стрелки.
Первый способ доступен владельцам коптеров, пульт которых оснащен триммерами регулировки. Они обычно распложены сбоку и снизу, пара для каждого джойстика. После того, как дрон поднят в воздух, выполняются следующие действия:
- при смещении вперед или назад, нажимается триммер сбоку от левого джойстика вверх или вниз;
- при вращении в какую-либо сторону недостаток устраняется триммером под левым джойстиком;
- смещения вперед-назад регулируются триммером сбоку от правого джойстика;
- уход влево-вправо компенсируется триммером под правым джойстиком.
Регулировка производится до тех пор, пока недостатки не будут устранены. Данная операция никак не влияет на работу дрона, делается калибровка только пульта.
Второй способ подходит для владельцев моделей без триммеров на пульте управления.
Совет! Пользоваться таким вариантом калибровки стоит только в тех случаях, когда машину тянет в сторону или ведет по направлению очень незначительно.
Чтобы компенсировать недостатки, потребуется настроить квадрокоптер. Операция эта долгая и кропотливая: следует подкручивать регуляторы двигателей для компенсации. После каждой попытки дрон поднимается в воздух для проверки правильности поведения.
Для дронов, у которых нет триммеров пульта, и присутствуют сильно выраженные отклонения, предусматривается процедура автоматической калибровки. Она подробно изложена в инструкции по эксплуатации.
Для того чтобы все прошло успешно и с первой попытки, рекомендуется как можно тщательнее выполнить начальную калибровку гироскопа дрона. Устройство устанавливается на ровную поверхность, включается, проходит предусмотренную производителем процедуру. Только после этого делается калибровка пульта.
Для систем, построенных на платах Ardupilot, предлагается программное обеспечение для изменения полетных параметров. Перед тонкой калибровкой, требуется задать начальные настройки регуляторов. Это делается следующим образом:
- включается пульт;
- левый джойстик устанавливается на максимум вверх;
- подключается питание дрона;
- электроника квадрокоптера сигнализирует готовность к базовой калибровке миганием светодиодов;
- отключается и снова включается питание дрона;
- после стандартного сигнала о состоянии батареи дрок издает короткий писк, что свидетельствует записи настройки максимальной тяги;
- левый джойстик опускается вниз до упора.
После того, как дрон издаст долгий сигнал — можно проверить работу двигателей. Затем газ убирают до минимума и отключают питание квадрокоптера для завершения начальной калибровки и установки параметрики по тяге. Дальнейшие тонкие регулировки производятся при помощи программного пакета mission planer.
Наша компания предлагает услугу по настройке многовинтовых летательных аппаратов любого назначения. В зависимости от сферы использования, наши специалисты выполнят настройку квадрокоптера таким образом, чтобы он был максимально отзывчивым и удобным для решения поставленных задач. Обычно услуга включает:
- Настройку электроники и аппаратуры управления;
- Настройку компаса, акселерометра и других датчиков;
- Настройку регуляторов скорости двигателей;
- Регулировку отзывчивости джойстиков (пульта управления);
- Прошивку или перепрошивку аппарата (в случае необходимости).
Правильно выполненная настройка квадрокоптера делает его максимально управляемым в любом режиме полета.
Итак, ваш новый квадрокоптер уже перед вами, но вы пока не умеете его запускать. С чего начать?
- Первым делом нужно собрать дрон . Почти все они поставляются в частично разобранном виде, поэтому навыки сборки конструктора вам очень пригодятся.
- Припасите запасной аккумулятор. Современные модели редко могут протянуть в воздухе больше 10 минут. А для полноценной тренировки этого времени не достаточно.
- Обязательно прикупите несколько запасных частей. Аварии неизбежны, а особенно часто ломаются именно пропеллеры.
- Далее следует откалибровать и настроить датчики : акселерометр, компас и GPS.
Остается только бегло просмотреть прилагаемую инструкцию и можно попробовать поднять в воздух свой первый аппарат.
Как триммировать квадрокоптер. инструкция
В этой статье мы расскажем вам, как триммировать квадрокоптер. Процесс триммирования можно назвать проще и понятнее – по своей сути, это калибровка устройства. 90% моделей выпускается уже откалиброванными и попадает вам в руки в комплектации Ready to Fly, но в ходе транспортировки от ударов эти настройки могут сбиться.
Первое, что нужно сделать перед триммированием, — это разобраться с функционалом джойстиков пульта дистанционного управления. Как правило, левый стик отвечает за перемещение дрона в вертикальной оси, а правый – за крены вбок и наклоны вперед. И второе, о чем стоит знать — это то, что процесс триммирования лучше всего производить только в воздухе.
Если устройство не наберет высоту хотя бы в 0,5 метра, то тянуть его будет создаваемая винтами воздушная подушка. Если же он наберет большую высоту, то вы сможете откалибровать его для зависания в воздухе без кренов и наклонов. Триммирование может быть необходимо как левому, так и правому джойстику. Как понять, с каким из рычагов управления проблема у вас?
- Если квадрокоптер постоянно кренится на левый или правый бок, то триммировать необходимо правый рычаг и производить регулировку по крену.
- Если квадрокоптер самостоятельно наклоняется то вперед, то назад – триммирование требуется для левого стика, регулировка которого будет производиться по тангажу.
- Если квадрокоптер одновременно и кренится на бок, и наклоняется, то вам придется откалибровать оба стика.
Для начала стоит понять, в каком из случаев квадрокоптеру требуется калибровка. Итак, вот поэтапный процесс:
- Первый этап – включение пульта ДУ и квадрокоптера.
- На втором этапе квадрокоптер запускается и поднимается на высоту минимум в 50 сантиметров. Уже на этом этапе возможно понять, в какую из сторон кренится дрон. Если на этом этапе вам для зависания приходится выполнять дополнительные маневры, можно сразу сказать, что триммирование квадрокоптеру необходимо.
- На третьем этапе вам предстоит выбрать между механической калибровкой и автоматической.
Теперь рассмотрим, чем отличаются механическая и автоматическая калибровка. Механическая используется в случае, когда отклонения значительные. Если же калибровка требует смещения положения триммера максимум на 5 позиций, воспользуйтесь автоматической калибровкой с пульта.
Процесс механической калибровки заключается в повторении одного и того же пункта – постепенного подкручивания регулятора тяги между тарелкой и сервоприводом. Автоматическая же калибровка подразумевает перечень действий со специальными переключателями в зависимости от проблемы.
Та же процедура необходима и в случае, если коптер наклоняется назад – только триммер ставится в верхнее положение. Аналогичные действия совершаются и в случае, если нужно откалибровать коптер влево или вправо. Если дрон уносит влево, установите триммер в крайнее правое положение, а если вправо, то в крайнее левое. Процесс настройки квадрокоптера для новичков показан на видео ниже.
Источник
Калибровка дрона.
Также может понадобиться калибровка дрона. Она происходит в программе DJI.
- Перейдите в «настройки контроллера» и выберите «продвинутые настройки».
- Далее «Sensors» → «Calibrate IMU».
- Во время калибровки следует разместить дрон на ровной поверхности. Следуйте инструкции, которая будет отображаться на вашем смартфоне.
Ознакомьтесь с инструкцией, изучите советы, которые описаны выше, чтобы полёт на квадрокоптере прошёл удачно и без сбоев. Учитесь управлять дроном постепенно, чтобы не потерять устройство из виду и не сломать его. На съёмку лучше берите с собой запасные батареи.
Пока один аккумулятор будет заряжаться, вы сможете установить другой и продолжать съёмку. Даже на локации, с помощью автомобильной зарядки вы сможете зарядить батарею. Если вы хотите снять очень крутое видео, то обратите внимание на дополнительные аксессуары, например, стабилизатор DJI.
Если вы ещё не купили летательный аппарат и только собираетесь это сделать, то прочитайте статью «Какой квадрокоптер выбрать в 2020 году», чтобы разобраться в этом вопросе. В MacTime вы можете протестировать все эти устройства и взять их в аренду для съёмки своего крутого видео.
Краткий гайд по квадрокоптерам для fpv. часть четвёртая – поговорим о мозгах?
Если Вы наткнулись на этот пост в ленте и не читали предыдущие – вот они:
Первая часть, в которой я рассказал о том, что такое FPV-полёты и что для них нужно, а так же посоветовал пару коптеров для новичков.
Вторая часть – про аккумуляторы и аппаратуру радиоуправления.
Третья часть – про движки и регуляторы.
К несчастью, из-за повышенного режима безопасности в связи с праздниками полетать и заснять материал мне не удалось. Так что сегодня – предпоследняя часть про теорию.
Ну а для начала – небольшой экскурс в историю. Давным-давно, когда деревья были выше, а трава зеленее, на территории ныне почившей страны росли и развивались кружки авиамоделизма. И в этих самых кружках дети, которые сейчас уже взрослые дяденьки, строили кордовые модели. Модели эти были жёстко соединены с пилотом при помощи тросов и ручки, изменяя положение которой пилот, собственно, и отклонял рули. Прошли года, на рынках появилась доступная аппаратура радиоуправления, и вместо стальных тросиков рули на модели стали отклоняться при помощи радиоволн и сервомашинок. Но принцип – принцип оставался тот же. Движением стика на пульте или ручки управления пилот напрямую отклоняет рули или изменяет обороты двигателя. Думаете, на квадрокоптерах применяется тот же самый принцип? А вот и нет. И в этом основное их преимущество.
Полётом дрона управляет полётный контроллер – по сути своей полноценный микрокомпьютер. Именно он, а не Вы, управляет креном, тангажом и рысканьем модели. Вы лишь указываете, в каком направлении лететь или, в режиме Акро (о нём расскажу чуть дальше), с какой угловой скоростью вращаться. Поэтому огромное количество дешёвых китайских дронов-игрушек и снискали такую популярность – управлять ими, по сравнению с моделями тех же самолётов, не в пример проще.
По итогу, вся жизненно важная начинка дрона состоит из полётного контроллера – мозга дрона, платы распределения питания, а так же подсоединённых к ним четырёх (6, 8) регуляторов с моторами и приёмника аппаратуры радиоуправления. Вот так всё это выглядит в сборе:
В центре, с белой стрелкой – полётный контроллер. Под ним расположена плата распределения питания (PDB). На фото к ней идут самые толстые красный и чёрный провода от жёлтого разъёма справа. У задних вертикальных стоек слева стоит приёмник. Чёрно-белые провода с чёрных разъёмов справа и красно-чёрные средние провода идут к регуляторам.
Внутренности игрушки же выглядят немного по другому:
Тут всё в одном – и полётник, и приёмник, и pdb, и регули… Осталось подключить батарейку с моторами и лететь.
Но главная разница между серьёзным дроном и игрушкой всё же не в этом. На довольно большом количестве мелких дронов всё собрано на одной платке:
А главная разница – в прошивке. И как раз о ней мы сейчас и поговорим. Вот так выглядит интерфейс серьёзного, “не игрушечного” полётника, подключённого к компу:
Да, люблю я Пелевина =)
А игрушечный дрон так просто не подключишь и не перепрошьёшь.
Но зачем всё это надо? Прошивки-перепрошивки, подключения… Летает – и чего ему мешать?
Во-первых, удобство. В бетафлайтовском интерфейсе полётник (и соответственно дрон) каждый пилот может настроить под себя. Начиная с того, на каком переключателе аппаратуры будет арминг (то есть включение движков дрона, на каком – пищалка для поиска упавшей модели (надо ли говорить, что на игрушечном пищалка вообще не предусмотрена) и кончая настройкой поведения самого дрона в полёте – будет ли он прощать новичкам ошибки или же действовать стиками придётся с ювелирной точностью. Настройка дрона, рейты и ПИДы это отдельная и ОЧЕНЬ серьёзная тема, и не факт, что у меня хватит скилла про всё это рассказать.
А во вторых, режим АКРО. Вспомните, как летает игрушка. Отклонил стик вперёд – и коптер летит вперёд с определённым углом наклона. Отпустил – сразу возвращается в положение, параллельное горизонту. Стик вправо – коптер летит таким же макаром, но вправо. Но сколько ты его вправо не отклоняй – бочку коптер не сделает. Такой режим, когда коптер двигается, как клешня в игровом автомате-хватайке и автоматически возвращается в горизонт при отпускании стика называется режимом автоматической стабилизации (стабом).
В стабе Вы управляете направлением движения дрона.
А что же АКРО? Акро – это гоночный режим. Это фристайловый режим. И там Вы управляете не направлением движения, а вращением дрона. Поэтому, как только Вы освоились с основными принципами управления дроном – учитесь летать в акро. Только этот режим раскроет полный потенциал вашего дрона и позволит летать уже по-настоящему. А вот крохотной игрушечной платке на этот режим просто не хватит “мозгов”.
Теперь – о том, какой-же полётник всё-таки брать. Для гоночных бодрых полётов я советую полётники на f4 – третьей серии процессора. У меня на основном сетапе стоит airbot f4 – доволен более чем.
Наглядную разницу между стабом и акро я покажу, как выберусь в поле. А пока по традиции – ответы на все вопросы в комментах.
P.S. Я специально упростил некоторые вещи – у нас гайд всё-таки для новичков.
Настройка камеры дрона
https://www.youtube.com/watch?v=4tzQ3z4oYMI
Если дрон оборудован камерой, перед первым полетом она также требует настройки. Калибровку проводят по нескольким параметрам:
Также рекомендуется проверить, в каком формате дрон снимает изображения. Для последующего редактирования фотографий лучше выбирать RAW. Снимки будут содержать больше деталей, чем в режиме JPEG, и подправить на компьютере экспозицию и баланс белого получится без потери качества.

Первый запуск квадрокоптера
Перед запуском убедитесь в том, что вы хорошо запомнили движения для запуска двигателей, взлета, посадки и других маневров. Если нужно, повторите их перед стартом по инструкции. Установите дрон на ровную площадку, выполните сопряжение с пультом по инструкции, запустите двигатели и при помощи стика пульта поднимите дрон в воздух.
Так как дроны чутко реагируют на малейшие движения стиков, выполняйте все движения плавно, без рывков, слегка нажимая на стик в нужном направлении. Потренируйтесь двигать дрон в разных направлениях и выполните посадку. Когда появится более-менее стойкий навык управления дроном, можно переходить к освоению разных полетных режимов и другого функционала.

После первых экспериментов можно приступать к освоению остальных возможностей квадрокоптера. Попробуйте управлять дроном в разных полетных режимах, потренируйтесь выполнять трюки и вести съемку. Не все движения у вас будут получаться сразу, а освоение сложных трюков может потребовать долгих часов тренировок. Но со временем вы сможете управлять дроном не хуже, чем любыми другими привычными для вас девайсами.
Режимы
Перед запуском обязательно нужно ознакомиться с режимами, которые встроены в ваш дрон.
- Ручной полет. Это самый сложный режим, но в то же время и самый интересный. В нем вы полностью берете управление на себя, а никакая дополнительная стабилизация не работает. Отлично подходит для тех, кто уже немного освоился в управлении и хочет поднять свой уровень мастерства пилотирования и научиться исполнять трюки.
- Стабильный полет. Он рассчитан на съемку фотографий или видео. Выбирая его, в работу вступает встроенный акселерометр, который позволит стабильно удерживать аппарат в воздухе. Этот режим можно назвать режимом для новичков, который идеально подойдет для всех тех, кто только что приобрел оборудование.
- GPS навигация. В этом режиме можно задать маршрут, по которому дрон сделает пролет. Своего рода автопилот и удобная фишка, особенно если вы не хотите контролировать каждый шаг своего БПЛА.
- Управление дроном с телефона. Каждая современная модель квадрокоптера может управляться со смартфона или планшета (причем работает и на Android и на iOS). Дрон ведёт прямую трансляцию картинки, которую захватывает его камера. Ее отображает мобильное устройство, подключенное к коптеру напрямую через WiFi. Очень полезная вещь, рекомендуем!
Сборка квадрокоптера
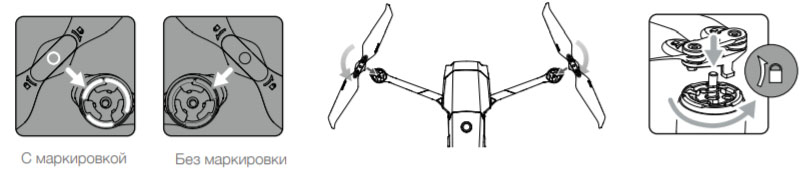
На первом этапе вам нужно правильно собрать дрон, чтобы он не получил повреждения при первом же полете. Сборка подразумевает раскладывание лучей (если они конструктивно раскладываются), установку пропеллеров и защиты, зарядку и установку аккумуляторов в дрон и пульт, а также подключение видеокамеры. В некоторых моделях детали присоединяются болтами, поэтому в комплект может входить отвертка.

В процессе сборки обратите внимание на правильную установку пропеллеров, чтобы не перепутать задние винты с передними. Обычно на основаниях для пропеллеров есть специальные метки, например, белые винты ставятся на белые метки, как в модели
. Что касается защиты, то не советуем отказываться от ее установки, если это ваш первый опыт управления коптерами. При получении хорошего навыка пилотирования вы можете в дальнейшем снять ее. Подключение камеры обычно сводится к установке в нее карты памяти (если она не стоит по умолчанию), креплению камеры в корпусе, удалению фиксатора с камеры и стабилизатора (при наличии), снятию защитных чехлов и подсоединению провода.
Перед первым полетом полностью зарядите аккумулятор дрона и батарею идущего в комплекте пульта управления или смартфона. Для их зарядки могут использоваться как специальные зарядные устройства, идущие вместе с дроном, так и типовые вроде сетевой зарядки для смартфонов. Пульт управления нередко работает от обычных пальчиковых батареек.

Синхронизация с пультом
- Джойстики с левым и правым стиком;
- Режимы полётов;
- «Флип» или поворот на 360 градусов;
- Направление движения вперед-назад;
- Еще один переключатель режимов;
- Включение-Выключение пульта управления.
У большинства дронов китайского производства, таких, как Syma, процесс синхронизации очень простой. Пульт достаточно включить и дождаться звукового или светового сигнала от дрона. Так происходит у большинства моделей, построенных с использованием трехосевого гироскопа.
Чтобы подключить пульт для дрона с шестью степенями свободы позиционирования, необходимо:
- включить пульт;
- переместить джойстик тяги вверх;
- опустить левый джойстик вниз;
- получить подтверждение от дрона в виде звукового сигнала или световой индикации.
Как вы уже догадались никакие курсы управления заканчивать не нужно, а управлять дроном придется с помощью специального пульта. По сути, все пульты для квадрокоптеров стандартны и слегка напоминают джойстики для игровых приставок. Они оснащаются двумя рычагами управления, где левый обычно связан с движением в вертикальной плоскости, а правый в горизонтальной.
Некоторые современные модели также имеют поддержку управления через приложение в смартфоне. При этом сам дрон и телефон нужно соединить через WiFi.
Советы и типичные ошибки
На первых этапах никогда не запускайте аппарат слишком высоко, особенно в тех ситуациях, когда недалеко от вас находится огромное количество людей. При совершении малейших ошибок техника может не только упасть и сломаться, но также травмировать окружающих людей. Вращающиеся лопасти могут нанести серьезные увечья.
Останавливайте свой выбор на безлюдных местах, желательно не асфальтированных. Таким образом, когда устройство всё-таки упадет, оно не получит сильные повреждения корпуса.
Если вы новичок, никогда не направляйте аппарат сторону рек. Затем, уже после освоения базовых навыков, вы сумеете полноценно пользоваться квадрокоптером над реками, на территории парков и мест, где сосредоточено большое количество людей.
Неопытным пользователям не нужно приобретать дорогостоящие модели. Вне зависимости от аккуратности обучения управлению или места для тренировочных полетов, всё-таки нередко приходится сталкиваться с ситуацией, когда коптеры падают. С другой стороны, техника предлагает широкие возможности для новичков, упрощающих маневрирование в сложных местах – четвертые Фантомы даже анализируют обстановку с помощью бортовых датчиков, предотвращая столкновения.
Перед тем как начать тренировку, заранее убедитесь в том, что аккумуляторная батарея, установленная на борту, полностью заряжена. Категорически запрещается запуск летательных устройств, в которых заряд батареи составляет не более 50%. Во-первых, тренировка окажется непродолжительной, а во-вторых, при наборе большой высоты устройство может полностью разрядиться ещё в воздухе.
Беспилотник — это устройство с простой схемой управления. Набравшись немного практики, вы сами убедитесь в этом.
Источник
Триммирование квадрокоптера
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете. При выполнении процесса обращайте внимание на следующие правила:
- если квадрокоптер клонит влево, то триммировать по рудеру его нужно в правую сторону и наоборот;
- если при полете дрон кивает носом вперед, то триммируем назад и обратно.
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.

Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности. Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах.


, цена 4600 руб")




