

- Хирургический робот daVinci
- . Роботы для обучения врачей
- . Роботизированная медсестра
- . Робот для телеприсутствия
- . Робот-фармацевт
- Эндоскопический бот
- Автоматизированные сенсорные протезы
- Экзоскелет
- Дезинфицирующий робот
- Микро-робот для целевой терапии
- Антибактериальные нанороботы
- Робот-компаньон
- Автоматическаязагрузкаупаковок –экономиявремени сотрудников
- Высокая скоростьвыдачи упаковок – всего за 7 секунд!
- Гибкость –быстраяадаптация к изменениям
- Европейскиестандарты работы – для передовыхаптек
- Интеллектуальноерешение – новыевозможностидля вашей аптеки
- Компактноехранение 3500упаковок накаждом м²
- Маркировка станет драйвером?
- Механизм перемещения
- Наилучшееиспользованиеплощадей
- Немецкоекачество – надежностьработы
- Один робот на шесть касс
- Привлечениепокупателей иповышение продаж до 18%
- Привод
- Программное обеспечение
- Простота иудобствоэксплуатации
- Рабочий орган
- Роботы заменяют фармацевтов в аптеках
- Руки хорошо, а два манипулятора лучше
- Сенсорная система
- Система управления
- Система хранения
Хирургический робот daVinci
Это самый распространенный из медицинских роботов, и сегодня он является стандартом для хирургии с помощью роботов. Это машина, которая стирает грань между “медицинским инструментом” и “роботом”, так как прибор находится под полным контролем хирурга.
Однако успехи, которых эта система добилась, просто поражают. С помощью роботизированной системы daVinci операции могут выполняться с минимальными разрезами и абсолютной точностью, что означает уменьшение кровотечения, снижение риска инфицирования и ускорение заживления.
Хотя робот-манипулятор да Винчи существует уже некоторое время, он продолжает совершенствоваться. При этом несколько крупных технологических фирм также разрабатывают аналогичные daVinci системы с более автономными характеристиками и широким спектром возможностей.
. Роботы для обучения врачей
В медицинском училище студенты могут проходить обучение не на мертвых телах, как это было принято в таких заведениях в течение многих лет, а с использованием специализированных обучающих роботов, причем с вполне реалистичными “кровавыми” процедурами.
Хотя, возможно, это не будет звучать захватывающе, но все же это, вероятно, лучше, чем обучение только на трупах, либо уже в работе на вполне реальных пациентах. Использование при обучении роботов существенно облегчает получение медицинских навыков, хотя бы за счет возможности многократного повторения определенных процедур и действий, а также значительно снижает расходы на такое обучение.
Именно поэтому эти устройства, которые кажутся скорее забавными, чем серьезными роботизированными системами, становятся настолько важными в этой сфере.
. Роботизированная медсестра
Медсестры – это основная и неотъемлемая часть коллектива, на которой держится жизнь любого медицинского “мира”. Однако они также перегружены работой и всегда работают в сжатые сроки. Здесь на помощь приходят роботы-медсестры. Роботы-медсестры – это системы, которые могут измерять жизненные показатели, заполнять цифровые документы и контролировать состояние пациента.
. Робот для телеприсутствия
Такое устройство выглядят как планшет на небольшой самодвижущейся тележке. Такие системы могут играть жизненно важную роль в сфере медицины как способ привлечь лучших диагностических экспертов и ведущих врачей в удаленные районы, где ощущается острая нехватка квалифицированных врачебных кадров.
Врачи, к примеру, из Москвы теперь могут общаться с местными врачами и пациентами в небольших поселениях Сибири или Дальнего Востока, делясь в режиме реального времени своими советами и знаниями по диагностике за небольшую плату, избавляя пациента от сложностей и серьезных затрат, связанных с поездкой в столицу, чтобы получить помощь от врача лично.
Однако, как бы глупо это ни казалось сегодня, вполне возможно, что уже скоро медицинский осмотр можно будет проводить с помощью планшета и цифровых устройств с дистанционным управлением, а не с помощью врача-терапевта. По крайней мере, в развитых странах, к которым мы пока себя отнести не можем.
. Робот-фармацевт
Такое устройство больше похоже на торговый автомат, который предназначен для продажи лекарственных препаратов и медицинских принадлежностей. Робот, который уже существует в природе, позволяет физически заменить действующего фармацевта в аптечном пункте.
Роботы также начали использоваться в производственных процессах фармацевтических компаний, заменяя людей во многих операциях, требующих монотонных и не повторяющихся действий.
Эндоскопический бот
Эндоскопия – это процедура, при которой маленькая камера вставляется в тело через “естественное отверстие” для поиска опухолей, повреждений или следов заболевания. Это очень неудобная и чрезвычайно неприятная процедура, которая может уже скоро остаться в прошлом.
В разработках таких компаний, как Medineering, используются гибкие, тонкие роботы, которые могут управляться, как радиоуправляемые модели автомобиля, в точном соответствии с потребностями врача. Они могут стабильно удерживаться в организме человека без дрожания, связанного с усталостью мышц человека, и использовать весь спектр инструментов, начиная с биопсии и заканчивая прижиганием ран.
Более впечатляющие роботы называются “капсульными эндоскопами”, в которых процедура сводится к простому проглатыванию робота размером с пилюлю, который проходит по пищеварительному тракту и помогает делать фотографии и собирать данные, которые можно отправить непосредственно на процессор для диагностики.
Автоматизированные сенсорные протезы
За последние несколько лет в области протезирования был достигнут невероятный прогресс, причем разработчики пытаются не только сделать подходящую замену конечности, но и расширить ее возможности там, где это не сделала природа. В лаборатории MIT Biomechatronics Lab исследователи создали управляемые с помощью гироскопов роботизированные конечности, которые способны отслеживать свое положение в пространстве, регулируя свои суставы примерно 750 раз в секунду.
Кроме того, они разработали бионическую кожу и нейронную имплантационную систему, которая взаимодействует с нервной системой человека, позволяя пациенту получать тактильную обратную связь от протезной системы и контролировать ее, как будто это настоящая рука.
Экзоскелет
Роботизированные экзоскелеты сегодня могут использоваться во многих медицинских областях. Для начала они уже используются, чтобы помочь людям с параличом снова ходить, что является значительным прорывом в медицине. Они также могут быть использованы для реабилитации после травмы спинного мозга или черепно-мозговой травмы, обеспечивая слабые мышцы дополнительной поддержкой, необходимой для выполнения движений и заживления повреждений.
Экзоскелеты работают за счет использования комбинации предустановленных движений, однако, сейчас уже ведутся новые разработки с развитием нейронных интерфейсов. Это вопрос времени, когда экзоскелет, управляемый непосредственно командами мозга, станет доступен большому количеству больных и здоровых людей.
Дезинфицирующий робот
Больничные инфекции – это проблема, которую наша система здравоохранения безуспешно пытается решить уже долгое время. При этом больницы применяют большое количество антибиотиков, которые могут стать питательной средой для развития некоторых из худших устойчивых к антибиотикам бактерий.
Поэтому крайне важно, чтобы в больничных палатах всегда поддерживалась чистота. Однако этого никогда не произойдет, поскольку ленивые и склонные к ошибкам люди неизбежно совершают ошибки, которых роботы не допустят. Новые дезинфицирующие роботы автоматически перемещаются в пустую палату пациента и бомбардируют ее мощными ультрафиолетовыми лучами, запрограммированными работать до тех пор, пока микроорганизмы не будут уничтожены.
Микро-робот для целевой терапии
Это весьма перспективные, хотя и относительно новые типы медицинских роботов. Основой их работы является использование механических частиц, близких к микроскопическим, для локализации препарата или определенной терапии в конкретном целевом участке тела.
Существует несколько возможных методов для доставки таких микрочастиц в цель, но в результате новых исследований появились микро-роботы с крошечными спиральными хвостами, которые могут быть направлены магнитным полем для вращения через кровеносные сосуды в определенное место в организме.
Антибактериальные нанороботы
Антибактериальные боты изготовлены из крошечных золотых нанопроволок и покрыты красными кровяными тельцами, которые могут удалять бактериальные инфекции непосредственно из крови пациента. Они могут сделать это, имитируя бактерию и ее токсины, а затем привлекая и захватывая их в нано-сетку, когда бактерии подойдут ближе.
Роботы также могут быть направлены через тело пациента с помощью специального ультразвука в определенное место для ускорения процесса очистки и лечения локализованных инфекций. Поскольку они используют естественную реакцию бактерий, нанороботы потенциально могут быть использованы вместо антибиотиков широкого спектра действия и могут оказать огромное влияние в нашей борьбе с ростом заболеваний, с которыми не могут справиться антибиотики.
Робот-компаньон
Роботы используются не только там, где необходимо решать проблемы, опасные для жизни. Дело в том, что миллионы пожилых, умственно отсталых или больных людей страдают от хронического одиночества и нуждаются в стимулах для жизни. Такими пациентами, как правило, также являются люди, нуждающиеся в периодических осмотрах со стороны опекунов или родственников, что может отнимать много времени.
Роботы-компаньоны решают многие из таких проблем и оказывают на пациентов меняющее их жизнь воздействие. Такое устройство представляет собой нечто вроде симбиоза тамагочи (виртуальный домашний питомец) и виртуального домашнего помощника на базе технологии Alexa, которое может вызвать скорую, если кто-нибудь упадет или ответить на вопросы, касающиеся здоровья.
Недавно разработанный робот Buddy – как раз такое устройство, которое, в первую очередь, предназначено для помощи одиноким старикам и больным людям. Этот небольшой и забавно смотрящийся робот даже взаимодействует со своими владельцами на постоянно меняющемся эмоциональном уровне и помогает им скрасить их одиночество. В прошлом году компания-разработчик этого устройства получила награду “Лучшие инновации 2023 года” за свои достижения.
Автоматическаязагрузкаупаковок –экономиявремени сотрудников
Каждый робот Фарматек уже имеетбазовую встроенную функциюполуавтоматической загрузки упаковок,а опционально доступный модульавтоматической загрузки сделаетпроцесс пополнения робота ещё болеепростым и приятным.
03.
Высокая скоростьвыдачи упаковок – всего за 7 секунд!
02.
Гибкость –быстраяадаптация к изменениям
Логика хранения упаковок внутриробосклада реализована так, что Выразмещаете внутри него абсолютноразный аптечный ассортимент с различным количеством упаковок каждой единицы. Аптечный робот самвыберет походящее место хранениявнутри для каждой упаковки.
Благодаря гибкой конструкции икомпактному манипуляторуробосклады обеспечивают плотное хранение упаковок разной формы – до3500 упаковок на каждом м2. Приизменении ассортимента ЛС роботгибко подстроится и автоматическинайдёт лучшие места для храненияупаковок с разным периодомоборачиваемости.
02.
Европейскиестандарты работы – для передовыхаптек
Современные инженерные решения иогромный опыт реализации проектоваптек воплотился в совершенно новомроботизированном складе Pharmathek.Робот является самым компактным всвоём классе, и уже работает впередовых аптеках Италии, Испании, Германии и др.
странах Европы. Роботлегко встраивается в аптеки разнойплощади, а его стильный итальянскийдизайн привнесёт особую атмосферу инновации. Станьте первыми сроботами Pharmathek, приобретякомплекс всех их преимуществ дляВашего бизнеса.
Интеллектуальноерешение – новыевозможностидля вашей аптеки
Интегрированная интеллектуальная система робоскладов для аптекPharmathek отслеживает внутренниезапасы ЛС, сроки годности препаратови по Вашему запросу может провестиинвентаризацию в режиме реальноговремени. Также роботы отслеживают статистику продаж и постояннопроводят внутреннюю оптимизациюмест хранения, располагая упаковки в наиболее оптимальных местах.
05.
Компактноехранение 3500упаковок накаждом м²
Благодаря упорядоченному хранениюупаковок ЛС в каналах наклонных полокробот-фармацевт Consis может вмещатьдо 25000* упаковок. Такой компактныймини-склад экономит площади, позволяя размещать 3500* упаковок накаждом квадратном метре.
*При среднем размере упаковок 100х30х60
04.
Маркировка станет драйвером?
Робот принимает упаковки высотой от 1,5 см и с определенным максимальным весом. Вспоминают, что когда он только приступил к работе в Краснодаре, то у него очень быстро закончились полочки для высоких упаковок. Пришлось просить поставщика сделать апгрейд и предусмотреть больше высоких полок.
Робот работает в круглосуточном режиме (ночью – только на выдачу). Каждые полгода проходит техническое обслуживание.
Машина поддерживает оптимальный температурный режим хранения, анализирует данные продаж за день и на основе анализа перекладывает товар таким образом, чтобы впереди стояли те упаковки, которые завтра с большой вероятностью потребуются, и упаковки с истекающим сроком годности.
«Некоторые аптечные роботы умеют считывать код маркировки и передавать сведения о них в систему 1С, после чего они направляются в систему мониторинга движения лекарственных препаратов, – рассказывает член Гильдии маркетологов Юлия Зуенкова.
https://www.youtube.com/watch?v=CI-KZ-fYuQ0
По оценкам Data Bridge Market Research, мировой рынок фармацевтических роботов будет ежегодно расти примерно на 13% и достигнет 227,36 млн долл. США к 2026 году.
Механизм перемещения
Механизм перемещения (манипулятор) включает каретку с закрепленным рабочим органом и привод.
Манипулятор обеспечивает перемещение товаров от места приема к месту хранения, а затем к месту выдачи.
Плоская вертикальная рабочая зона, образованная вертикальной плоскостью этажерки для хранения товаров, определяет использования
декартовой системы координат перемещения робота вдоль плоскости этажерки (2 степени подвижности) и смещение каретки с рабочим органом в горизонтальной плоскости внутрь этажерки (третья степень подвижности).
Такая схема используется в плоттерах планшетного типа или режущих станках с ЧПУ (лазерных, фрезерных и т. д.).
Если этажерки расположены с двух сторон от механизма перемещения, то каретка должна разворачиваться на 180 градусов (четвертая степень подвижности).
Для ускорения работы могут использоваться 2 механизма перемещения или более
[11].
Некоторые производители аптечных роботов используют манипулятор в угловой системе координат с 6 степенями подвижности, недостатком которого является ограниченная рабочая зона, доступная манипулятору, расположенная вокруг него. Избыточность степени подвижности (6 вместо трех или четырех) невыгодна в финансовом плане.
Наилучшееиспользованиеплощадей
Роботы Фарматек можно устанавливатьв различных частях аптеки: вподвальном помещении, вматериальной части (подсобныхпомещениях) или даже на 2-м этаже,сохраняя торговые площадисвободными. Помимо выбора из 2-хбазовых модификаций роботов дляВашей аптеки доступно такжепроектирование робосклада под индивидуальные размеры, что даёт Вам возможность наилучшегоиспользования имеющейся площадиаптеки.
04.
Немецкоекачество – надежностьработы
Немецкое качество и надежностьаптечных автоматов Consis многократноподтверждено опытом эксплуатации ваптеках по всей Европе и в России*. Такие аптечные роботизированныесистемы работают в передовых аптекахВеликобритании, Австралии, Канады, аспециально разработанные моделироботов Consis – на стремительнорастущем Азиатском рынке.
*Первый робот в России -аптечный робот Consis был установлен в одной из московских аптечных сетейв 2006 г.
Один робот на шесть касс
Первая роботизированная аптека в России открылась в 2006 году в Москве. Потом были Владивосток, Абакан, Екатеринбург и Краснодар. В Европе робосклады широко применяются в фармацевтической рознице и считаются одним из эффективных способов решения проблемы дефицита кадров в отрасли.
«Лекарственные склады были роботизированы еще десять лет назад, – рассказал в ходе Недели ритейла генеральный директор «Еаптеки» Антон Буздалин. – Это связано с тем, что фармацевтика в силу ассортимента и невероятно развитой конкуренции была вынуждена максимально оптимизировать свои логистические издержки.
Муниципальная аптечная сеть «Аптека Кубани» обзавелась роботом в 2023 году. Он был установлен в аптеке № 6, самой крупной не только в сети, но и в регионе в целом.
Площадь торговой точки составляет 666 кв. м, обслуживание посетителей одновременно осуществляется на шести кассах. Основная задача робота заключается в том, чтобы повысить скорость отпуска товара. Он с ней успешно справляется, рассказала «ФК» заместитель заведующей аптекой № 6 Антонина Якунина.
«После того как к нам поступила очередная партия препаратов, наша сотрудница загружает их в робосклад, – говорит Якунина. – Сначала на экране вводятся данные, что это за препарат, количество упаковок, затем сам товар помещается на ленту и уезжает на склад».
Привлечениепокупателей иповышение продаж до 18%
Установленный в рецептурной зоне внепосредственной близости отфармацевтов стильный дизайнаптечного робота и скоростнойманипулятор, выдающий упаковкилекарственных средств одну за одной, вызывает интерес у постоянных покупателей и привлекает новых.
03.
Привод
Чтобы получить высокую точность позиционирования каретки механизма перемещения обычно используют электрический привод с шаговыми двигателями
для каждой степени подвижности, а также сенсорную систему, позволяющую системе управления рассчитывать и компенсировать ошибки перемещения.
Шаговый двигатель поворачивается на угол в соответствии с количеством поданных на него импульсов, поступающих от электронных блоков (драйверов, контроллеров), входящих в систему управления.
Усилие шагового двигателя, необходимое для перемещения товара и деталей механизма перемещения, зависит от его мощности, а также амплитуды и длительности (точнее скважности)
поданных на него импульсов.
Программное обеспечение
Параметры движения каретки робота, данные размещения товаров и информация о них (например, название, международное непатентованное название, фармгруппа, дженерики, правила хранения и употребления и т. д.)
хранятся в базе данных, которая вместе с системой управления базами данных СУБД и программами управления механизмом перемещения составляет
программное обеспечение (ПО) аптечного робота.
Существенной частью ПО является интерфейс пользователя, предназначенный для взаимодействия
человека с автоматической системой — аптечным роботом. В первую очередь, это взаимодействие покупателя с продающим аптечным роботом, осуществляемое обычно через сенсорный видеомонитор.
Аналогично осуществляется взаимодействие персонала (провизора или фармацевта, оператора). Дополнительно используется удаленный контроль робота.
Исполнителем программного обеспечения являются управляющие компьютеры и микропроцессоры, входящие в состав системы управления.
Простота иудобствоэксплуатации
Аптечные роботы Консис легкоинтегрируются с любымвнутриаптечным программным продуктом. Такая интеграцияпозволяет оптимизировать учётассортимента, размещённого вроботе. Процесс загрузки роботамаксимально упрощён, благодарявстроенному лазерному механизму,который быстро укажет на нужнуюячейку для загрузки.
05.
Рабочий орган
В качестве рабочего органа робота обычно применяется установленный на каретке захват.
Роботы заменяют фармацевтов в аптеках

Американцы MTS Medication Technologies готовы представить свою новую разработку – робота Omnicell M5000. Его задача – подготавливать наборы лекарств индивидуально для каждого больного. Робот распределяет их по специальным “кармашкам” с расчётом на несколько дней приема медикаментов.
Медицинский робот распознает медикаменты по таким параметрам, как штрихкод, формами размер таблеток, а также учитывает их цвет.
За один час медицинский робот успевает собрать наборы для 50 пациентов. Такая скорость значительно повысит работу аптек и облегчит работу медикам.
Создание подобных лекарственных наборов хорошо для пожилых пациентов. Каждый день им необходимо принимать несколько разных видов медикаментов. Согласно статистике в США число таких людей составляет 32 миллиона.
Было подсчитано, что медику требуется около 15 минут на каждого больного, чтобы составить им подобный набор на неделю. Запоминать каждый раз количество и время приема таблеток, необходимость пополнения запасов для многих людей представляет сложность. Теперь сортировкой и напоминанием о своевременности приема медикаментов будут заниматься роботы.
American College of Preventive Medicine подсчитал, что не соблюдая рекомендации врача и время приема медикаментов, каждый год умирает более 100 тысяч человек. И 105 миллиардов по той же причине выливаются в финансовые потери.
Распределение лекарств в блистеры в зависимости от времени приема нашло свое применение еще 25 лет назад, когда MTS Medication Technologies начала выпускать наборы, в которых хранятся медикаменты. Применяются они чаще всего в домах для престарелых.
В странах Европы такая система далеко не нова, но используют европейские медики совсем другой подход – «карточки». Этот метод гораздо дешевле, потому что услуги такого рода стоят денег, на которые не все страховые компании согласны потратиться. К тому же, это значительные временные затраты.
Но, когда страховщики придут к заключению, что один раз вложить средства в роботов гораздо дешевле, эта система начнет массово распространяться.
Массовый выпуск роботов Omnicell M5000 ожидается в начале 2023 года. И хотя ранние разработки робота начались еще 10 лет назад, они не были так хороши, как последняя модель. Его скорость значительно выше, так же как и точность работы.
Для современных аптек использование роботизированных систем обычная практика. Роботы помогают в приеме товара, контроле и складировании. Ведется автоматическая проверка срока годности. Такая система позволяет сократить ошибки, которые возможны из-за человеческого фактора. При повышении скорости обслуживая растет его качественная составляющая. Фармацевт может сосредоточиться на консультации пациента, в то время как техническую работу выполняет робот.
В ряде российских аптек сегодня также можно встретить роботов-помощников. Немецкое устройство Consis B2 был изготовлен производителем Willac, установлен в первый раз 9 лет назад сетью “Самсон-Фарма”.
В 2023 Consis B2 появился Абакане, республика Хакасия. Модель Consis B3 работает в “Приморской краевой аптеке” в городе Владивосток. В Москве роботов можно встретить в аптеках “Эвалар” и “Ваше здоровье”, также они работают в аптеках Петербурга и Екатеринбурга.
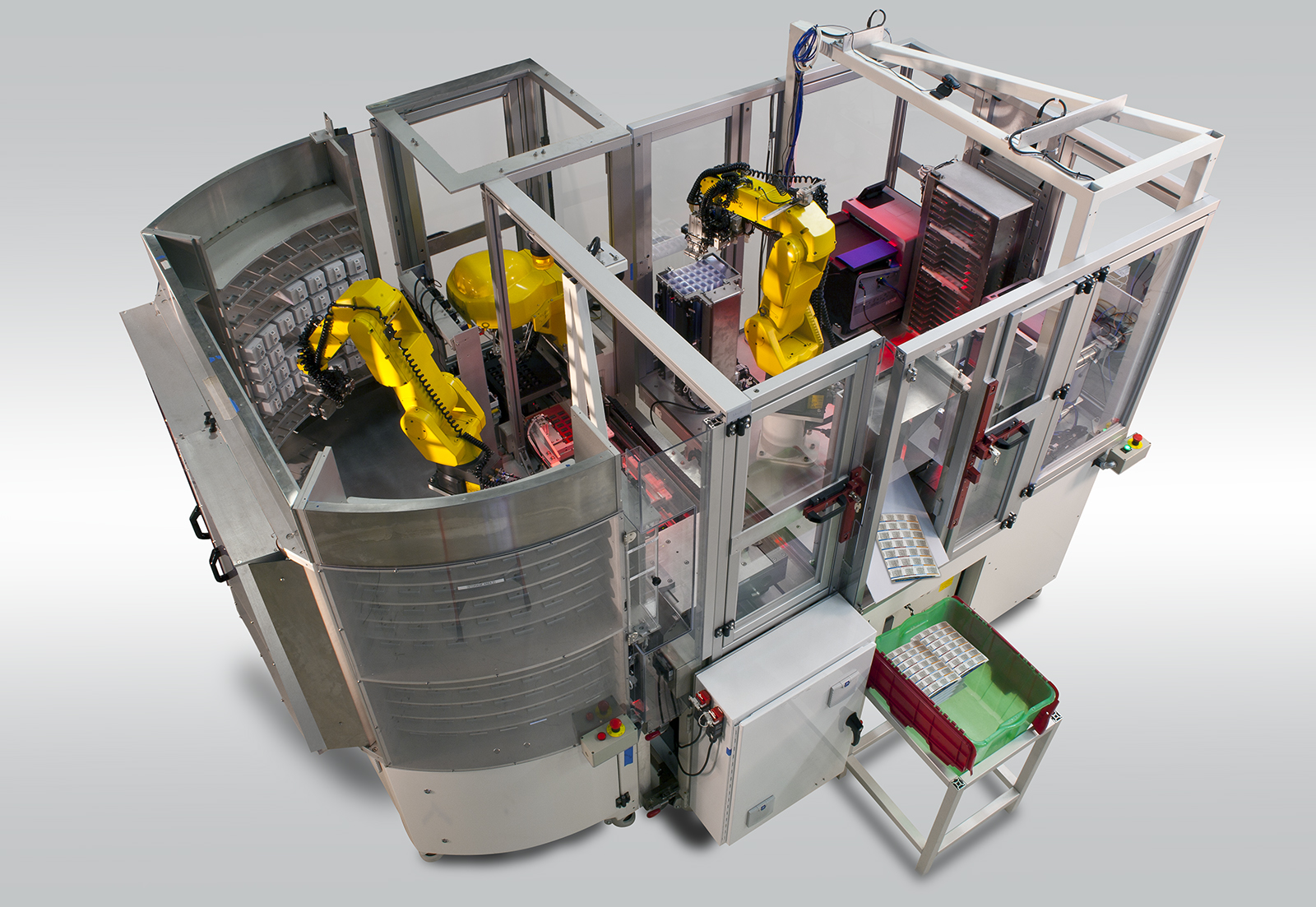
Руки хорошо, а два манипулятора лучше
Робот идентифицирует упаковки, определяет их размер, находит подходящую полку для них и раскладывает их по стеллажам. Корреспондент «ФК» просит сотрудницу «Аптек Кубани» проверить робота и вместе с «обещанными» компьютеру лекарствами положить средство другого наименования.
Робот фотографирует «лишнюю» пачку и «переспрашивает» у оператора, нет ли тут ошибки. Если человек подтверждает, что все верно, то машина принимает отличный от других препарат и запоминает эту ситуацию. В следующий раз он уже не станет ничего уточнять, потому что выучил этот урок.
Если оператор отклоняет операцию, то робот возвращает попавшую к нему по ошибке упаковку.
В аптеке № 6 робот оснащен двумя манипуляторами. Оба работают и на приемку, и на выдачу товара. Если с кассы поступает заказ (через компьютерную программу), робот прекращает раскладывать и начинает собирать заказ. Через несколько секунд в специальном окошке за спиной у первостольника уже лежит заказанная номенклатура.
Сенсорная система
Сенсорная система содержит различные датчики, в первую очередь, датчики перемещения (угловые, линейные), обеспечивающие обратную связь в механизме перемещения. Показания датчиков отслеживаются системой управления.
Кроме того, для обеспечения распознавания фармпрепаратов могут использоваться датчики на рабочем органе, например, считыватель штрих-а.
Система управления
Аптечные роботы по классификации промышленных роботов являются автоматическими интеллектуальными роботами с элементами программного, адаптивного управления и обучения.
При приемке товара система управления распознает его название и выбирает место его хранения с учетом размещения одноименных или близких товаров (обучение и адаптация).
Система хранения
Чаще всего используется схема хранения в виде этажерки с полками, на которых размещаются товары.
В рабочем пространстве могут устанавливаться 2 этажерки, между которых расположен механизм перемещения.


, цена 4600 руб")




