
")
Батарея и зарядное устройство
Суммарный
пиковый
ток, потребляемый моторами даже среднего мультикоптера, может достигать 70 А. Но при этом батарея должна быть как можно легче и иметь емкость, достаточную для полета как минимум 10 минут. Этим противоречивым требованиям лучше всего соответствуют литиевые аккумуляторы.
Существуют две основные модификации литиевых аккумуляторов: литий-ионные (Li-Ion) и литий-полимерные (LiPo, Li-Pol), отличающиеся типом электролита.
В литий-ионном аккумуляторе используется гелевый электролит, а в литий-полимерном— специальный полимер, насыщенный литийсодержащим раствором.
В моделизме используются именно литий-полимерные батареи, т. к. они способны отдавать больший рабочий ток, что в нашем случае критически важно. Другим весомым преимуществом литий-полимерных батарей является отсутствие жидкого электролита и возможность изготавливать более прочные плоские аккумуляторы произвольного размера.
В мобильных телефонах, планшетах, фотоаппаратах и прочей бытовой электронике также используются литий-полимерные батареи, но они не рассчитаны на большой рабочий ток, поэтому от идеи использовать их в моделизме следует сразу отказаться. В остальном принципы работы, свойства и правила эксплуатации различных версий литиевых аккумуляторов не различаются.
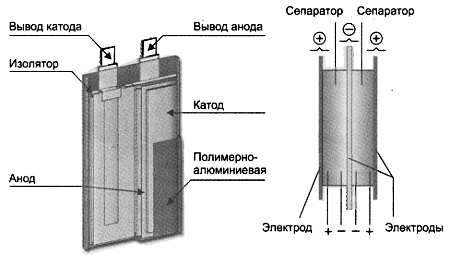 Рис. 2.23.Устройство литий-полимерной батареи
Рис. 2.23.Устройство литий-полимерной батареи
Ячейка представляет собой герметичный плоский пакет из очень прочного металлизированного пластика, внутрь которого помещена слоеная структура из электродов, и сепараторов, пропитанных гелевым полимерным электролитом. Благодаря такой конструкции утечка электролита исключена, а сама батарея может иметь произвольную форму.
Рабочее напряжение одной ячейки — 3,7 В. В зависимости от уровня заряда батареи напряжение может быть немного меньше или больше. Миниатюрные модели могут питаться от одной ячейки, наиболее распространенные батареи состоят из двух или трех последовательно соединенных ячеек.
Обозначения параметров силовой литиевой батареиЕмкость батареиCapacity
) выражается в миллиампер-часах (mAh) либо в ампер-часах (Ah), например “3300” или “3.3”, и сокращенно обозначается буквой
С
.
•
Предельный разрядный ток
в амперах принято обозначать величиной, кратной емкости С. Например, маркировка 2 °C при емкости 3300 mAh означает, что разрядный ток не должен превышать 20·3,3 = 66 А. Также иногда применяется маркировка
Hi Discharge
, обозначающая батарею с повышенным разрядным током. При выборе батареи следует внимательно читать ее спецификацию. Производители и продавцы высокого класса в описании батареи зачастую указывают два параметра:
предельный длительный ток
(continuous discharge), отдаваемый несколько минут подряд, и
предельный пиковый ток
(peak discharge) продолжительностью не более 1–2 с. Значение предельного пикового тока может быть на 15–20 % больше, чем непрерывного. Разумеется, предельных пиковых нагрузок надо избегать, но несколько пиковых нагрузок за время эксплуатации не приведут к разрушению батареи или пожару.
Однако китайские производители и продавцы иногда слегка лукавят и указывают на этикетке батареи предельный пиковый ток. Поэтому, если вы не уверены, какой параметр указан на батарее и нигде это дополнительно не расшифровано, следует считать, что предельный длительный ток примерно на 20 % меньше указанного на упаковке.
•
Предельный зарядный ток
в амперах обычно ограничивается значением 1С.
Например, батарею емкостью 3300 mAh можно заряжать током не более 3,3 А. Сейчас появились батареи с ускоренным зарядом (fast charge), которые можно заряжать током до 5С, что существенно сокращает время заряда, однако не следует злоупотреблять этим режимом.
Схема соединения ячеек
обозначается буквой
Sserial
) при последовательном соединении и буквой
Рparallel
) при параллельном соединении. Например, маркировка 3S обозначает три последовательно соединенные ячейки, что дает рабочее напряжение 3,7·3 = 11,1 В. Маркировка 3S2P означает, что ячейки соединены параллельно по две для увеличения емкости и рабочего тока, затем три таких пары соединены последовательно.
С появлением мощных силовых батарей параллельное соединение стало применяться реже.
Литий-полимерные аккумуляторы имеют ограниченный срок службы. Причем даже новый, ни разу не заряжавшийся аккумулятор теряет емкость при хранении. За 2 года хранения нового аккумулятора теряется примерно 20 % емкости.
После первого цикла заряда-разряда необратимые химические процессы старения резко ускоряются, и, как правило, за три календарных года аккумулятор теряет 40–60 % емкости, даже если редко эксплуатируется. Силовые батареи с повышенной токоотдачей подвержены старению особенно сильно.
Поэтому нет никакого смысла “экономить” литий-полимерную батарею после покупки. Наоборот, надо стараться сполна исчерпать ее возможности, пока она еще новая. Также нежелательно покупать старые батареи. Кроме естественного старения, батарея теряет емкость и токоотдачу с каждым циклом заряда.
Стандартный срок службы современного литий-полимерного аккумулятора составляет 600 циклов заряда-разряда. Но, как правило, у силовых батарей существенное снижение емкости и возрастание внутреннего сопротивления происходит значительно раньше, что делает дальнейшую эксплуатацию батареи нецелесообразной.
Визуальным признаком деградации батареи является вздутие ячеек. Попытка выпустить газ через прокол оболочки, с последующей герметизацией липкой лентой, пользу не принесет, поскольку газ — это лишь следствие необратимых процессов химической деградации.
Разгерметизация пакета приводит к ускорению окислительных процессов внутри ячейки. Объективными признаками износа батареи являются:
• резкое падение емкости, батарея быстро заряжается и разряжается;
• возрастание внутреннего сопротивления, из-за чего батарея сильнее нагревается и отдает меньший ток в нагрузку.
Характерной особенностью литиевых батарей является разброс характеристик отдельных ячеек, из которых она составлена. Производители качественных батарей осуществляют при сборке стендовый подбор и отбраковку ячеек, тогда как китайские фирмы могут собрать батарею не только из ячеек из разных фабричных партий, но даже с разных фабрик.
Часто бывает так, что лишь одна из последовательно включенных ячеек существенно состарилась, тогда как остальные могут послужить еще сезон. Поэтому полезно приобретать как минимум две одинаковые батареи, чтобы впоследствии иметь возможность собрать из двух батарей одну.
Иметь запас полезно и на случай аварии, когда одна из ячеек может быть пробита. Чтобы выявить потенциально дефектную ячейку, достаточно регулярно измерять напряжение каждой ячейки на балансирном разъеме после полетов. Сниженное относительно других ячеек напряжение укажет на “слабое звено”.
Зарядка литиевых батарей
У литиевых батарей отсутствует так называемый “эффект памяти”, поэтому их можно подзаряжать после частичной разрядки, и сколь угодно часто. Для них это будет даже полезно, тогда как хранение в разряженном состоянии, напротив, вредно для батареи. Однако
категорически запрещено повторно ставить на зарядку уже заряженную батарею
. Это может привести к избыточному заряду с быстрым выходом батареи из строя или даже к пожару.
Литий-полимерные батареи можно заряжать только при помощи специального зарядного устройства
. Такое устройство может быть как специализированным, например, в комплекте с покупной моделью, так и универсальным, способным работать с разными типами батарей. Наиболее простую конструкцию имеет зарядное устройство для миниатюрных батареек, состоящих из одной ячейки.
Такие батарейки используются в микрокоптерах наладонного размера и могут заряжаться от разъема USB. Универсальные зарядные устройства построены на основе микроконтроллера (рис. 2.24 и 2.25) и позволяют настроить параметры заряда (напряжение и максимальный зарядный ток) под конкретную батарею, а также видеть на дисплее зарядного устройства количество энергии, “закачанной” в батарею, и продолжительность заряда.
Intelligent Charger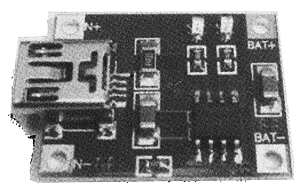 Рис. 2.24.Зарядное устройство для миниатюрных аккумуляторов на основе интегрального контроллера заряда
Рис. 2.24.Зарядное устройство для миниатюрных аккумуляторов на основе интегрального контроллера заряда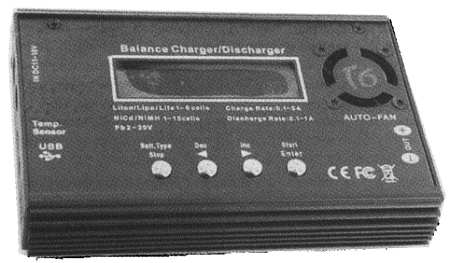 Рис. 2.25.Универсальное зарядное устройство на основе микроконтроллера
Рис. 2.25.Универсальное зарядное устройство на основе микроконтроллера
Как мы уже говорили, ячейкам, из которых состоит батарея, присущ разброс параметров. Обычно после разрядки напряжение на ячейках слегка различается. Но в процессе зарядки напряжение на ячейках необходимо уровнять с точностью не менее 0,01 В. Если при каждом цикле заряда просто подавать зарядное напряжение на батарею, она, конечно же, зарядится до нужного напряжения, но при этом какие-то ячейки останутся слегка недозаряженными, а какие-то будут регулярно испытывать перезаряд — возникнет так называемая разбалансировка батареи, приводящая к ускоренному выходу некоторых ячеек из строя. Для выравнивания напряжения на ячейках батареи оснащают отдельным
балансирным разъемом
, на который выведены провода от контактов всех ячеек. Этот разъем подключают к специальному электронному устройству — балансиру (рис. 2.26), который в процессе заряда перераспределяет зарядный ток между ячейками, выравнивая их заряд. Большинство современных зарядных устройств оснащено встроенным балансиром.
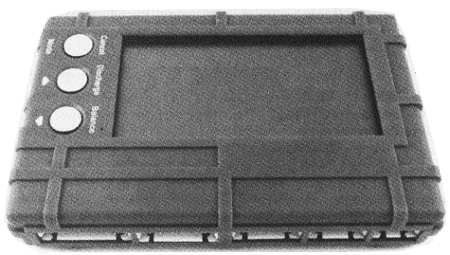 Рис. 2.26.Специальный балансир/разрядник/тестер для литиевых батарей
Рис. 2.26.Специальный балансир/разрядник/тестер для литиевых батарей
Нет острой нужды использовать балансир при каждой зарядке, особенно если батарея качественная. Но контроль напряжения ячеек необходимо вести постоянно.
Категорически запрещается ставить на зарядку батарею, у которой напряжение между ячейками различается более, чем на 20 %!
Это чревато перезарядом тех ячеек, у которых напряжение выше, перегревом с разгерметизацией и пожаром. Если вы хотите попытаться реанимировать батарею с большим разбросом напряжений на ячейках, необходимо сначала через балансирный разъем отдельно подзарядить самую разряженную ячейку (ячейки).
Зарядка силовых литий-полимерных батарей производится фиксированным напряжением из расчета 4,20 В на ячейку и заданным для данной батареи током. В процессе заряда батареи напряжение на ее клеммах постепенно повышается, а зарядное устройство не позволяет зарядному току превысить заданное значение.
Этот режим называется режимом стабилизации тока. Через некоторое время напряжение на батарее достигает значения 4,20 В на ячейку и далее не нарастает. Этот режим называется режимом стабилизации напряжения. К моменту перехода в режим стабилизации напряжения батарея набирает примерно 70–80 % емкости и потребляемый батареей зарядный ток начинает снижаться. При снижении зарядного тока до 0,1–0,2С процесс заряда завершается.
Длительный заряд малыми токами не применяется и, в отличие от никель-кадмиевых аккумуляторов, для литиевых аккумуляторов вреден и грозит избыточным зарядом.Примечание
При отрицательных температурах литиевые аккумуляторы вообще не заряжаются, а положительная температура не должна превышать 5 °CОсобенности эксплуатации и хранения
Литиевые аккумуляторы чрезвычайно капризны и требуют очень аккуратного обращения. Глубокий разряд ячейки до напряжения 2,7–2,9 В приводит к быстрому снижению ресурса. При разряде до 2,5 В или ниже ячейка полностью выходит из строя в течение 20–30 минут.
Если испорченная батарея состоит из нескольких ячеек, следует проверить напряжение на каждой ячейке в отдельности. Зачастую выходит из строя только одна ячейка и оставшиеся можно будет использовать в качестве запасных или собрать из них батарею на меньшее напряжение.
Примечание
Избыточный заряд до напряжения выше 4,20 В приводит не только к выходу ячейки из строя. Возможно вздутие ячеек, перегрев, разгерметизация и пожар.
При температуре ниже -5 °C батарея стремительно теряет накопленный заряд даже без нагрузки. Как показывает практика, при температуре батареи -5…-10 °C время полета сокращается вдвое. Вспомните, кстати, как быстро разряжаются на морозе смартфоны и прочие гаджеты, питаемые от литий-ионных батареек.
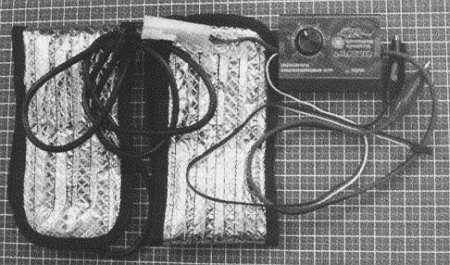 Рис. 2.27Подогреваемый чехол с термостатом для предполетной транспортировки литиевых батарей
Рис. 2.27Подогреваемый чехол с термостатом для предполетной транспортировки литиевых батарей
Нагрев до температуры около 60 °C приводит к быстрой деградации батареи. При нагреве до 70 °C вследствие перегрузки или короткого замыкания начинается цепная реакция саморазогрева за счет накопленной энергии и последующий пожар. Разряженный аккумулятор при замыкании не загорится, а тихо выйдет из строя.
Подготовка батарей к хранению
По поводу хранения данные несколько противоречивы. С одной стороны, в регламенте обслуживания и хранения литиевых аккумуляторов предписано хранение с зарядом 75 % от номинала. С другой стороны, экспериментальные данные показывают, что силовые батареи лучше всего сохраняют свои параметры при хранении с зарядом 45–50 % от номинального заряда и температуре около 10 °C.
Вероятно, истина в том, что с фабрики новые батареи поступают заряженными на 75 %, а после начала эксплуатации их лучше хранить при заряде 50 %. В любом случае, хранение полностью заряженных аккумуляторов приводит к быстрой потере емкости. Например, по опыту автора, хранение полностью заряженных батарей при комнатной температуре с ноября по март привело к сокращению полетного времени на 35 %.
При этом емкость батарей, измеряемая зарядным устройством, уменьшилась лишь на 15 %. Но резко возросло внутреннее сопротивление батарей, и существенная часть энергии стала расходоваться на их нагрев.
Под длительным хранением мы подразумеваем перерыв в использовании батарей на срок более трех месяцев.
Поэтому, если перерыв в полетах составит две-три недели, специально готовить батарею к хранению не надо. Но при подготовке к длительному хранению все же лучше воспользоваться специальным балансиром-разрядником или интеллектуальным зарядным устройством, тщательно отбалансировать ячейки и разрядить батарею приблизительно до 50 % емкости.
Если вы используете несколько одинаковых батарей, то рекомендуется наклеить на них липкие этикетки или кусочки малярного скотча и условными значками отмечать каждый цикл “разряд/заряд”, а также подозрительные ячейки. Это позволит распределить нагрузку между батареями и более качественно их обслуживать.
Полетный контроллер
Зачем вообще нужен специальный полетный контроллер — вычислительная система, работающая в реальном времени по довольно сложным алгоритмам? Очевидно, что квадрокоптер необходимо непрерывно стабилизировать, парируя порывы ветра и неоднородность воздушных масс, а возможностей человеческого организма для этого недостаточно.
Современный полетный контроллер оснащен набором миниатюрных интегральных сенсоров, непрерывно отслеживающих положение рамы в пространстве, воздействующие на нее угловые ускорения, атмосферное давление и направление силовых линий магнитного поля.
Классическим устройством для стабилизации объекта в пространстве либо измерения угловых ускорений является гироскоп.
Все мы из школьных уроков физики знаем про механический гироскоп-волчок либо про вращающийся в свободном подвесе маховик. При попытке изменить угловое положение оси вращающегося маховика возникает противодействующая сила. В трехмерном пространстве произвольное изменение положения рамы квадрокоптера можно разложить на вращение по трем взаимно ортогональным осям.
Соответственно, возникают мгновенные угловые ускорения по каждой из этих осей. Эти ускорения могут быть измерены я использованы для выработки компенсирующей реакции в системе с обратной связью, которой в нашем случае является квадрокоптер, оснащенный полетным контроллером.
Современные датчики положения и ускорений представляют собой интегральные микросхемы размерами в несколько миллиметров. Внутри у них находится сложная электромеханическая структура из упругих подвесов, грузиков, пружин, конденсаторов и электронной части для усиления и обработки сигналов. Такие устройства принято обозначать аббревиатурой МЭМС (MEMS —
MicroElectroMechanical SystemПринцип работы интегрального гироскопа
Чувствительным элементом интегрального гироскопа обычно являются два миниатюрных грузика, колеблющихся на упругом подвесе в противоположных направлениях (рис. 2.2).
Рис. 2.2.Устройство интегрального гироскопа
Источником колебаний грузиков являются гребенчатые электростатические двигатели. Грузики, вместе с электродами, расположенными на подложке, образуют конденсаторы, входящие в состав дифференциальной схемы, вырабатывающей сигнал, пропорциональный разности емкостей конденсаторов.
Линейное ускорение одинаково воздействует на оба грузика и подложку, поэтому сигнал на выходе дифференциальной схемы не появляется. Когда возникает вращательное ускорение по оси со, то на грузики начинает действовать сила Кориолиса FC, отклоняя грузики в противоположных направлениях.
Соответственно, емкость одного конденсатора увеличивается, а другого уменьшается, что порождает разностный сигнал, пропорциональный величине углового ускорения. Изначально, при включении, разностный сигнал на выходе гироскопа не нулевой, поэтому требуется процедура стартовой калибровки, когда микроконтроллер опрашивает показания гироскопов в состоянии покоя и принимает их за нулевые.
Во время прохождения калибровки нельзя двигать коптер.
Но почему в конструкции квадрокоптера нельзя обойтись простейшей системой стабилизации на основе гироскопов, по одному на каждую ось вращения? Зачем нужны другие датчики и микроконтроллер со сложной программой?
В реальных условиях квадрокоптер не отклоняется идеально лишь по одной оси. В общем случае отклонение комбинированное, с неким соотношением между осями. По этой причине необходимо устройство, которое будет обрабатывать сигналы от всех гироскопов и формировать управляющие сигналы для регуляторов оборотов моторов.
Например, под влиянием случайного порыва ветра квадрокоптер отклонился по диагонали назад вправо. Значит, управляющая система должна увеличить обороты правого заднего мотора и уменьшить левого переднего, отклоняя раму вперед влево. Но моторы, регуляторы и пропеллеры не идеально одинаковые, и команду они отработают по-разному.
Возникнет некомпенсированный реактивный крутящий момент. Следовательно, одновременно с выравниванием квадрокоптера в горизонт полетный контроллер должен оперативно внести коррективы в обороты другой пары моторов, чтобы скомпенсировать вращение по курсу.
И это самый простой пример, в котором мы не учитываем, что в то же самое время с пульта могут поступать сигналы управления. Впрочем, с вычислительной задачей для системы с тремя гироскопами способен справиться недорогой микроконтроллер начального уровня.
Сейчас по такому принципу устроены простые игрушечные квадрокоптеры-“НЛО”. Такие игрушки неплохо летают в помещении, но для управления ими необходимо постоянно визуально контролировать, в каком положении находится квадрокоптер.
Напомним, что интегральный гироскоп — это всего лишь датчик углового ускорения.
Для него нет понятия “верх” или “низ”, и ему безразлично, в каком статическом положении относительно горизонта он находится. Он лишь показывает мгновенное угловое ускорение относительно начального положения. Как только внешнее воздействие начнет поворачивать раму квадрокоптера вокруг одной из осей, то от соответствующего гироскопа немедленно поступит сигнал на процессор полетного контроллера.
В ответ контроллер скорректирует обороты моторов так, чтобы скомпенсировать ускорение. Но как только внешнее воздействие прекратится, угловое ускорение станет равным нулю, и на основании сигналов одних лишь гироскопов контроллер не узнает, вернулся ли квадрокоптер в исходное положение.
Это задача оператора, которую он может решать только при визуальном контроле.
А теперь представьте, что вы командой с пульта отклонили квадрокоптер на пять градусов вправо, а затем вернули рукоятку пульта в нейтральное положение. В соответствии с сигналом пульта контроллер сделает обороты всех моторов одинаковыми, но это вовсе не означает, что квадрокоптер вернется в горизонтальное положение. Гироскопам имеющийся
статический
наклон будет безразличен. Нет углового ускорения — на выходе гироскопа нулевое значение. Кроме того, гироскоп имеет ограниченную чувствительность: медленное вращение он просто не заметит.
При гироскопической стабилизации оператор должен выровнять коптер вручную.
На практике, квадрокоптер, оснащенный только гироскопами, не может стабильно висеть более минуты даже в помещении. Далее нужно вручную парировать его дрейф. Свое влияние на показания гироскопов оказывают изменение температуры корпуса и угловые ускорения, возникающие при вращении Земли.
Следовательно, для более продвинутой конструкции полетного контроллера необходим датчик, показывающий положение квадрокоптера относительно земной поверхности (если точнее, то относительно вектора ускорения свободного падения, который всегда направлен перпендикулярно земной поверхности, к центру Земли). Такой датчик есть в каждом современном смартфоне или планшете и называется
акселерометромПринцип работы интегрального акселерометра
Акселерометр — это МЕМС-устройство, которое измеряет линейные ускорения. В состав интегрального акселерометра входят чувствительный элемент и электронная часть, осуществляющая предварительную обработку сигнала.
В очень упрощенном виде чувствительный элемент представляет собой токопроводящий грузик на гибком подвесе, помещенный между двумя электродами (рис. 2.3).
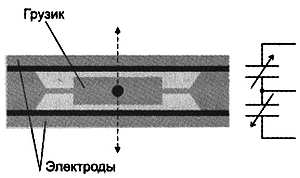 Рис. 2.3.Устройство чувствительного элемента акселерометра и его эквивалентная электрическая схема
Рис. 2.3.Устройство чувствительного элемента акселерометра и его эквивалентная электрическая схема
Грузик и электроды образуют два конденсатора. При смещении грузика под действием ускорения емкость одного конденсатора уменьшается, а другого увеличивается. Так как заряд конденсаторов постоянен, то изменяется напряжение на выводах конденсаторов. Это изменение измеряется встроенной электронной схемой, результат измерения в цифровом виде выдается в ответ на запрос внешнего вычислительного устройства.
Результат может быть как положительным, так и отрицательным в зависимости от направления вектора ускорения.
Реальный сенсор акселерометра устроен значительно сложнее, в нем детали конструкции выполняют несколько функций одновременно. Но для понимания принципа работы упрощенной схемы достаточно.
x, уz
. Вектор действующего на устройство ускорения вычисляется микроконтроллером через проекции вектора на три оси. Даже если устройство находится в покое, на него действует ускорение свободного падения
g
. Вектор
g→
направлен вертикально вниз, к центру Земли. Если корпус акселерометра расположен строго горизонтально, то вектор земного тяготения совпадает с осью
z
и ускорение действует только на один сенсор. Но стоит наклонить акселерометр, как появятся составляющие вектора
g→
по осям
х у
, а составляющая по оси
z
пропорционально уменьшится. На основании величин проекций вектора земного тяготения на оси и их знака микроконтроллер вычисляет наклон квадрокоптера. Именно по такому принципу ваш смартфон или планшет определяет ориентацию экрана.
Поскольку датчики акселерометра не идеально одинаковые и печатная плата может быть смонтирована не идеально ровно, перед началом эксплуатации акселерометр необходимо откалибровать: поместить устройство строго горизонтально и сообщить бортовому контроллеру, что текущие показания акселерометра соответствуют горизонтали.
Соответствующие корректировочные константы записываются во встроенную память микроконтроллера. В этом состоит различие между процедурами калибровки гироскопа и акселерометра: гироскоп калибруют после каждого включения питания, а также при длительном перерыве между взлетами, а акселерометр однократно, после окончания сборки коптера.
После смены версии прошивки контроллера или изменения конструкции квадрокоптера акселерометр необходимо откалибровать заново!
Существенным недостатком MEMS-акселерометров является высокая чувствительность к вибрациям. Но вибрации — неизменный спутник винтокрылых аппаратов, поэтому необходимо принимать специальные меры по виброизоляции, а также балансировке воздушных винтов и моторов.
Именно появление доступных по цене трехосевых акселерометров определило взрывной рост популярности квадрокоптеров. Еще несколько лет назад акселерометры были, в основном, двухосевыми, а трехосевые стоили весьма дорого и были редкостью. С появлением игровой приставки
Nintendo Wii
и игровых манипуляторов
WiiMotionPlusNunchak
ситуация кардинально изменилась. Малогабаритные трехосевые интегральные акселерометры и гироскопы стали доступны по вполне разумным ценам. Первые энтузиасты покупали платы манипуляторов
Nintendo
и подключали их к вычислителю на основе модуля Arduino. Затем к процессу подключились китайские производители, начавшие массовое производство полетных контроллеров с полным наборов сенсоров “на борту”. Отсюда исторически происходит название одной из самых популярных открытых прошивок
MultiWii
и платы контроллера
MultiWii All-In-One
(MWIAIOP).
Благодаря тому, что акселерометр определяет положение квадрокоптера относительно горизонтали, становится возможным автоматическое выравнивание устройства (автогоризонт). Как только ручки управления на пульте вернулись в нейтральное положение, полетный контроллер воспринимает это как команду выровнять квадрокоптер в горизонтальное положение, которое вы задали при калибровке.
Есть и другие положительные моменты в использовании акселерометра. Предположим, командой с пульта мы наклонили квадрокоптер для полета вперед. Чтобы компенсировать уменьшение вертикальной тяги, необходимо равномерно увеличить обороты всех моторов пропорционально наклону.
При отсутствии акселерометров можно приблизительно вычислить наклон квадрокоптера через угловое ускорение, его продолжительность и величину управляющего сигнала с пульта. Но проще и точнее угол наклона вычисляется по данным с акселерометров.
Разумеется, акселерометры измеряют не только ускорение свободного падения, но и линейные ускорения по любой из осей при движении квадрокоптера.
В ряде случаев эта информация тоже бывает полезна.
С другой стороны, когда надо быстро определить скорость и знак углового ускорения, проще использовать гироскоп, который так же выдает эти данные более точно и в готовом виде. Таким образом, каждый сенсор хорош для своей задачи.
В современных MEMS-микросхемах трехосевые гироскопы и трехосевые акселерометры часто объединяют в одном корпусе с размерами около 3x3x1 мм. В этом же корпусе находится электронная схема для предварительной цифровой обработки данных, с внешним протоколом обмена SPI или I
2
С.
Чтобы определить курсовое направление рамы квадрокоптера, нужен еще один датчик —
интегральный компас
, или
магнитометр
. Квадрокоптер может лететь как угодно, вбок, назад, или по диагонали, поэтому “вперед” в нашем случае — это условное направление рамы и контроллера, относительно которого определяется фактическое направление полета. На плате контроллера направление “вперед” обычно обозначается стрелкой.
Принцип работы интегрального магнитометра (компаса)
В основе конструкции интегрального магнитометра (рис. 2.4) лежит анизотропный магниторезистивный эффект. Чувствительный элемент изготавливается из пермаллоевой пленки, способной изменять свое сопротивление в зависимости от направления протекающего через нее тока и направления вектора ее намагниченности.
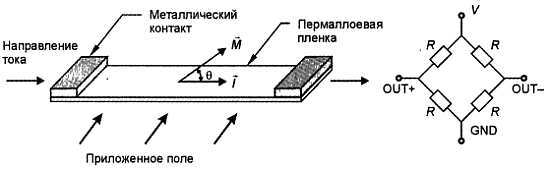 Рис. 2.4Устройство интегрального магнитометра
Рис. 2.4Устройство интегрального магнитометра
Четыре пермаллоевых элемента соединяются в измерительный мост (см. рис. 2.4). При подаче постоянного напряжения на мост датчик начинает измерять интенсивность внешнего магнитного поля, направленного вдоль его чувствительной оси. Мостовой датчик имеет ось предпочтительного намагничивания, так называемую легкую ось, и наиболее чувствителен к полям, направленным перпендикулярно этой оси.
В квадрокоптерах применяются трехосевые интегральные магнитометры, состоящие из трех независимых датчиков, ориентированных по трем ортогональным осям и электронной схемы. В спецификации магнитометра всегда указывают направление осей относительно корпуса (рис. 2.5).
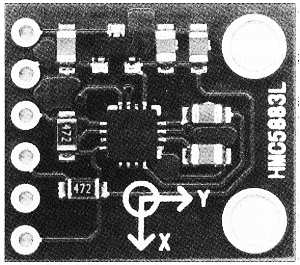 Рис. 2.5.Магнитометр HMC5883L на плате расширения
Рис. 2.5.Магнитометр HMC5883L на плате расширения
Магнитометры не подвержены вибрации, но на их показания влияют внешние близко расположенные металлические предметы. Помехи можно разделить на три основных класса.
• “Искажения твердого железа” (Hard Iron Distortion) — к магнитному полю земли добавляется постоянное магнитное поле от намагниченных предметов, например магнита звукоизлучателя.
Намагниченными могут быть даже выводы радиодеталей, изготовленные из луженого железа. Эта постоянная составляющая может быть исключена при калибровке.
• “Искажения мягкого железа” (Soft Iron Distortion) — магнитное поле искажается посторонними предметами, не имеющими собственной намагниченности.
Например, сплавы никеля, пермаллой искажают силовые линии поля. Такие искажения зависят от положения объекта в пространстве и труднее компенсируются. К счастью, в конструкции квадрокоптера обычно не бывает таких предметов. Детали из сплавов алюминия и меди не вносят искажения.
• Динамические или вихревые помехи. Это специфическая особенность электрических летательных аппаратов, особенно коптеров. Мощные токи, протекающие через проводники силовых цепей и батарею, порождают магнитные поля в окружающем пространстве.
Причем напряженность этих полей постоянно меняется в зависимости от нагрузки на моторы.
Иногда магнитные помехи настолько сильны, что делают невозможным использование компаса и даже способны привести к аварии. К сожалению, переменные магнитные поля невозможно скомпенсировать программно и приходится применять специальные конструктивные меры.
Для уменьшения наводок микросхему компаса стараются выносить с платы контроллера и поднимать вверх на 10–20 см над рамой. При укладке силовых проводов следует избегать образования петель, все провода должны иметь минимальную длину. Силовые провода рекомендуется перекручивать.
Впрочем, в квадрокоптерах начального уровня вполне можно обходиться без компаса и при наличии магнитных помех просто отключать его в настройках.
Малогабаритные контроллеры, предназначенные для полетов внутри помещения, по очевидной причине компас не содержат.
Перед началом полетов магнитометр необходимо откалибровать, проведя процедуру вращения коптера по всем осям. Детали этой процедуры могут зависеть от применяемой прошивки контроллера.
Благодаря наличию компаса возможен интересный режим полета, именуемый Headfree.
Yaw
, то условное направление “вперед”, зафиксированное при взлете, не изменится. При наклоне правого стика пульта вперед квадрокоптер всегда будет лететь вперед, при наклоне вправо — всегда вправо и т. д., независимо от того, как в данный момент развернута рама.
Считается, что этот режим удобен для начинающего пилота, а также при полетах на большом удалении, без видеоканала и средств телеметрии, когда визуальный контроль над положением рамы затруднен. Если пилот случайно развернул квадрокоптер, то это не отразится на управлении и поможет избежать аварии.
Используя компас, при настройке квадрокоптера не забудьте указать такой параметр, как
магнитное склонение
(не путайте с магнитным наклонением) для своей местности.
Магнитное склонение
— это угол между географическим и магнитным меридианами в точке земной поверхности. Магнитное склонение считается положительным, если северный конец магнитной стрелки компаса отклонен к востоку от географического меридиана, и отрицательным — если к западу.
Приемники gps
Приемник спутниковой навигации в оборудовании квадрокоптера нужен для того, чтобы:
• выполнять автоматический полет по заранее заданному маршруту;
• при полетах по FPV определять текущее расстояние до точки взлета, скорость и высоту полета;
• при потере сигнала управления обеспечить автоматический возврат к точке взлета.
Приемник GPS следует приобрести даже ради одной лишь функции автовозврата, которая спасает коптер при потере сигнала управления.
Аббревиатура GPS (Global Positioning System) стала нарицательной и в быту обозначает как любые пользовательские приемники сигналов, так и американскую навигационную систему, которая официально называется NAVSTAR.
к любой из существующих систем
спутниковой навигации, хотя среди специалистов популярна также обобщающая аббревиатура GNSS (
Global Navigation Satellite System
— глобальная система спутниковой навигации). Поэтому наименование “двухсистемный приемник GPS/ГЛОНАСС”, строго говоря, неправильное. На самом деле это “двухсистемный приемник NAVSTAR/ГЛОНАСС”. Впрочем, американцы собственную навигационную систему уже давно называют просто GPS, так же, как Библию называют просто “Книга”.
И всем понятно, о чем речь. Мы далее тоже будем именовать американскую систему просто GPS.
Развертывание американской системы было завершено в 1996 году. Российская система по причине известных внутренних проблем тех лет существенно отстала в развитии, вследствие чего GPS NAVSTAR стала почти монополистом и мировым лидером.
Но сейчас развитию российской системы уделяется большое внимание, ее орбитальная группировка и наземная инфраструктура близки к завершению. Поэтому в продаже все чаще появляются двухсистемные приемники. Остальные системы существенно отстают в глобальном охвате и находят применение в отдельных государствах и специфических областях типа судовождения, управления полетами гражданской авиации, геодезии и т. д.
Описанию принципов работы GPS посвящено большое количество подробных и познавательных статей и книг, поэтому мы рассмотрим лишь общие понятия, а также базовые различия между GPS и ГЛОНАСС. Система спутниковой навигации состоит из орбитальной группировки (спутники), наземного (центры управления и слежения) и абонентского (приемники потребителей) сегментов.
Изначально планировалось, что спутниковая группировка GPS будет состоять из 24 спутников, распределенных по 4 на шести орбитах. Однако этого оказалось недостаточно для надежного покрытия критически важных регионов Земли. Кроме того, надо иметь спутники в резерве.
Поэтому общее количество спутников увеличено до 32, и на некоторых орбитах вращается до 6 спутников. Спутники движутся на высоте около 20 000 км со скоростью 3000 м/с и совершают два оборота вокруг Земли за сутки.
Спутники ГЛОНАСС располагаются на трех орбитальных плоскостях, по 8 спутников в каждой, и теоретически орбитальная структура ГЛОНАСС обеспечивает более полное и надежное покрытие.
К сожалению, на момент написания книги формирование орбитальной группировки ГЛОНАСС не было завершено и на орбите находилось 25 спутников, не все из которых введены в эксплуатацию. К тому же, четыре новых спутника были утрачены при неудачном запуске ракеты-носителя.
Но работы по завершению группировки ведутся очень интенсивно, и есть надежда, что в ближайшие два-три года система будет полностью развернута.
GPS NAVSTAR использует кодовое разделение каналов с вещанием кодированных сигналов на нескольких частотах, а ГЛОНАСС — частотное.
Но суммарная ширина спектра сигналов ГЛОНАСС даже меньше, чем у GPS, поэтому один и тот же радиочастотный тракт приемника может принимать сигналы обеих систем. Дальнейшее разделение сигналов спутников и выделение полезной информации производится методами цифровой обработки сигнала внутри абонентского приемника.
Принцип определения координат
Определение координат объекта производится путем измерения дальностей до спутников. Рассмотрим пример с тремя навигационными передатчиками
А, ВС
на плоскости (рис. 3.5).
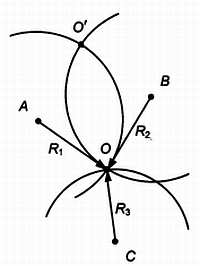 Рис. 3.5.Определение координат на плоскости дальномерным методом
Рис. 3.5.Определение координат на плоскости дальномерным методом
Измерение расстояний
RARB
до передатчиков
А В
дает нам две
окружности положения
с соответствующими радиусами. Объект может находиться как в точке
О
, так и в точке
О’
. Добавление третьего передатчика ликвидирует эту неоднозначность на плоскости.
Аналогично происходит определение местоположения в трехмерном пространстве, только вместо окружностей мы имеем пересекающиеся сферы местоположения, которые сложно изобразить на книжной иллюстрации.
пересечение трех окружностей положения в трехмерном пространстве
, что порождает неоднозначность в виде двух точек положения. В ряде случаев одну из точек навигационный приемник может сразу исключить, если воспользоваться дополнительной информацией о положении: привязка к наземной станции навигации или сотовой связи, к точке доступа Wi-Fi, ранее сохраненные данные и т. д.
Также очевидно, что объект заведомо не может находиться, например, на глубине 300 м под землей. Однако это частности, а в общем случае для определения координат объекта в трехмерном пространстве (ширина-долгота-высота) необходимы как минимум четыре спутника.
Пространственные координаты спутника известны с большой точностью. Чтобы вы оценили точность позиционирования спутников на орбите, отметим, что учитывается давление солнечного света на оболочку спутника, истечение газов наружу из материала оболочки, влияние гравитационного поля Луны и неоднородность гравитационного поля Земли.
Расстояние от спутника до объекта вычисляется умножением скорости света на время прохождения сигнала от спутника до приемника. Но скорость света в вакууме и атмосфере различается. Кроме того, при прохождении через тропосферу и ионосферу радиосигнал испытывает переменные задержки, величина которых зависит от текущего физического состояния верхних слоев атмосферы.
двухчастотные
приемники очень дороги, сигнал на второй частоте зашифрован и доступ к его использованию лицензируется. Поэтому в гражданской практике двухчастотные приемники (не путайте с двухсистемными) практически не используются. Кроме атмосферных задержек на определение дальности влияют инструментальные задержки сигнала в цепях передатчика и приемника, ошибки часов спутника и приемника, а также релятивистский эффект, возникающий при движении спутника по орбите. Поэтому фактически приемник работает не с дальностями, а с
псевдодальностями
до спутников.
Для определения времени прохождения сигнала от спутника часы приемника должны быть очень точно синхронизированы с часами спутника, т. к. расхождение порядка 0,3·10
-6
с дает погрешность 100 м. В общем случае вычислитель приемника решает систему уравнений, в которой четыре неизвестных: три пространственных координаты
X, Y, Z
и время
t
. Как известно, для нахождения однозначного решения системы уравнений, их должно быть на одно больше, чем неизвестных. Поэтому для точной синхронизации шкал времени нужны уже пять спутников, а не четыре. Разумеется, задача устранения погрешностей, связанных с переменными задержками, может решаться путем накопления измерений и статистической обработки на основе сигнала от четырех спутников.
Но такой подход менее точен и требует существенно большего времени для накопления измерений.
Еще одной серьезной проблемой является прием отраженных сигналов в условиях городской застройки или сильно пересеченного рельефа местности. В некоторых случаях приемник может получать только отраженный сигнал.
Наличие отражений приводит к ошибочному определению координат. Для выявления и отбраковки отраженных сигналов желательно, чтобы приемник принимал одновременно сигналы от шести спутников.
Итак, современные модули GPS, применяемые в квадрокоптерах,
одновременно
обрабатывают сигналы не более чем от шести спутников. Дальнейшее увеличение числа одновременно обрабатываемых спутников существенно усложняет и удорожает приемник, но не дает заметного увеличения точности. Даже если в зоне видимости находятся десять и более спутников, приемник в определенный момент времени будет работать только с шестью.
Но наличие “запасных” спутников позволяет приемнику отвергать сигналы, которые он счел отраженными и недостоверными, а также динамически переключаться на сигнал спутников, имеющих более выгодное для навигации геометрическое расположение на орбите в текущий момент.
Геометрический фактор
Скорость и точность определения местоположения зависят от расположения спутников в пространстве относительно приемника. Наихудшим вариантом является расположение нескольких видимых спутников приблизительно на одной воображаемой линии с приемником. В этом случае погрешность и время определения возрастают до максимума.
Поэтому наличие четырех-шести видимых спутников не всегда означает качественное позиционирование даже на открытой местности. Наилучшим вариантом является равномерное распределение нескольких спутников по полушарию над приемником. Применительно к геометрическому фактору, орбитальная структура ГЛОНАСС является более удачной, чем GPS NAVSTAR.
Альманах и эфемериды
Навигационные сообщения спутников несут два типа данных: альманах и эфемериды. Альманах содержит параметры орбит всех спутников, при помощи которых приемник может предсказать расположение спутников с достаточно большой погрешностью и не тратить время на попытки приема сигнала со спутников; которые заведомо не видны.
Данные альманаха, передаваемые спутниками, обновляются каждые 30 суток. При хранении в памяти выключенного приемника они действительны не более 2–3 месяцев, далее погрешность в расчетах орбит становится недопустимой.
Эфемериды содержат корректирующие поправки, которые вычисляются наземными станциями слежения и регулярно загружаются в бортовой вычислитель спутника.
В отличие от альманаха, каждый спутник передает только собственные эфемериды, обновляемые каждые 30 минут. При хранении в приемнике срок действия эфемерид не более 4–6 часов.
Информация передается со спутника с низкой скоростью, всего 50 бод.
Пакет данных содержит контрольную сумму для проверки правильности приема. Также в пакет данных входит флажок “здоровья” спутника (health status). Если спутник неисправен или находится на обслуживании, он продолжает излучать навигационный сигнал для нужд станций слежения, но его сигнал помечается как недостоверный и отвергается приемником.
“Холодный” старт
При “холодном” старте ожидаемая позиция, время, альманах и эфемериды неизвестны. Приемник сканирует все каналы и весь диапазон возможных значений временных задержек навигационных сигналов. После того, как навигационный сигнал хотя бы от одного спутника получен и разобран, приемник обладает информацией о текущем альманахе всей спутниковой группировки и переходит к “теплому” старту.
Время “холодного” старта на открытой местности для современных модулей составляет порядка 30–35 с. При плохих метеоусловиях или мешающих кронах деревьев продолжительность старта может увеличиться до 60–70 с. Таким образом, при использовании приемных модулей на открытой местности можно обходиться без хранения альманаха в памяти и заново стартовать при каждом включении бортового питания. Но в городских условиях время “холодного” старта существенно возрастает, иногда до 10–15 минут.
“Теплый” старт
При “теплом” старте приемник, включенный после 6 и более часов бездействия, начнет сканировать сигналы спутников, используя данные хранящегося в памяти альманаха и время собственных часов. При этом будет осуществляться поиск только тех спутников, которые теоретически, по данным альманаха, должны находиться в видимом полушарии на момент старта.
“Горячий” старт
При “горячем” старте в памяти приемника хранится вся актуальная информация, включая действующие эфемериды, поэтому приемник переходит к определению позиции спустя 1–3 с после включения. Если же к моменту включения приемника видимыми являются менее трех спутников со “свежими” эфемеридами, то приемнику потребуется дополнительное время, чтобы собрать эфемериды с остальных спутников по алгоритму “теплого” старта.
Технология A-GPS
Для ускорения “холодного” старта применяется загрузка в приемник альманаха, ориентировочных координат и времени, полученных по альтернативным каналам. Эта технология называется A-GPS (Assisted GPS). Обычно сначала по ближайшим сотовым станциям и точкам доступа Wi-Fi определяются приблизительные координаты с точностью 200–500 м, затем из Интернета скачивается актуальный альманах для этой местности и загружается в память приемника.
Этот метод требует наличия беспроводного доступа в Интернет и используется в современных телефонах, но малоприменим для оборудования квадрокоптеров.
Переход приемника в режим захвата спутников (GPS Fix) означает лишь, что приемник загрузил альманах и эфемериды и “видит” достаточное для работы созвездие спутников.
Для достижения приемлемой точности позиционирования потребуется дополнительное время, пока приемник накапливает данные для снижения погрешностей статистическими методами.
Некоторые модули GPS с устаревшими прошивками при неудачном расположении спутников зависали и вообще не могли стартовать по процедуре “холодного” старта, пока в них с компьютера не выгружали альманах.
В современных модулях такая проблема не встречается.
Для хранения информации в модуле приемника GPS используется энергозависимая память с резервным источником питания. Обычно это миниатюрный литиевый аккумулятор или ионистор. Иногда спрашивают, почему в приемниках не используется обычная память EEPROM, которая не теряет информацию при отключении питания?
Антенны GPS
Антенны портативных GPS-модулей имеют специфическую конструкцию. Обычно это керамический блок с нанесенными на него электрохимическим методом металлическими элементами (рис. 3.6).
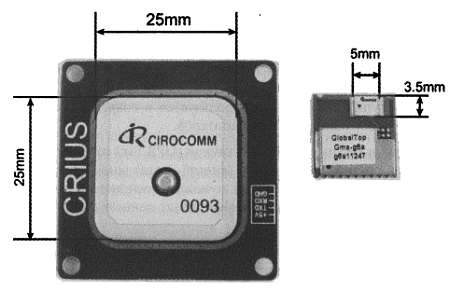 Рис. 3.6Обычная керамическая антенна GPS и миниатюрная чип-антенна
Рис. 3.6Обычная керамическая антенна GPS и миниатюрная чип-антенна
После изготовления антенну обычно подстраивают на заводе, подрезая уголки вибратора наждаком или лазером. Иногда применяются активные антенны, когда непосредственно на антенном модуле смонтирован малошумящий усилитель. Такие антенны более эффективны в сложных условиях, но на открытом пространстве, когда сигналы от спутников и без того хороши, они не дают заметного выигрыша.
Недостатками керамической антенны являются большой вес и хрупкость, из-за чего антенны часто трескаются при аварии. Иногда трещина антенны не видна невооруженным глазом, но существенно снижает чувствительность приемника.
В последнее время, с появлением миниатюрных приемников GPS и массовым распространением смартфонов, получили широкое распространение миниатюрные керамические чип-антенны размером в несколько миллиметров и весом в доли грамма. Такие антенны производятся по технологии, схожей с изготовлением микросхем и подстраиваются лазером в момент изготовления.
Несмотря на миниатюрные размеры, чип-антенна в сочетании с современными микросхемами приемника практически не уступает по параметрам обычным антеннам, но стоит несколько дороже и, как правило, применяется в составе готовых миниатюрных модулей GPS.
Поток данных GPS, протокол NMEA
Навигационный модуль передает поток данных в полетный контроллер по последовательному интерфейсу UART (СОМ) или I
2


, цена 4600 руб")




