

- Mission planner для начинающих.
- Аппаратура управления и камера
- Внешний вид
- Внешний вид и комплектация
- Внешний вид и характеристики
- Где должна происходить калибровка?
- Для чего нужна калибровка квадрокоптера
- Как выявить откалиброван квадрокоптер или нет
- Как откалибровать квадрокоптер syma x5c
- Какие кнопки есть на пульте управления syma x5c
- Камера
- Камера и качество съёмки
- Квадрокоптер mjx x101 бюджетный, но поднимает экшн-камеру
- Комплект поставки
- Комплектация
- Коптер в воздухе
- Краткое руководство пользователя для готового к полетам коптера (rtf)
- Крепление пропеллеров
- Лётные характеристики
- Общее впечатление
- Подготовка квадрокоптера к полёту
- Подключите радиоприемник: pwm или ppm сигналы
- Предполетная информация
- Пульт управления
- Решение проблем с пду или джойстиком
- Синхронизация пульта с коптером
- Следует ли калибровать квадрокоптер?
- Следующие шаги
- Типы калибровки
- Триммирование квадрокоптера
- Установите mission planner
- Функциональность
- Характеристики
- Штатные fpv камеры имеют следующие характеристики
- Заключение
Mission planner для начинающих.
Что изменилось:
1. Рама – поменял на более легкую: во взлетной массе коптер потерял примерно 180 граммов, плюс развесовка стала более сбалансированной (аккум цепляется под низ, между штангами, @HellKern, я поправил =) теперь при прикреплении подвеса аккум можно сдвинуть к хвосту, и баланс всегда будет оптимальным);
2. Регуляторы – да, многие говорили, что г@#но, и я сам в этом убедился: один очень быстро начал перегреваться и сгорел. По рекомендации @OTR1UM взял Hobbywing Opto 20A – работают без нареканий.
3. Моторы – на одном (или двух) нашел косяк изоляции (разное сопротивление между фазами), заменил на новые.
Остальное (чего немного) осталось тем же.
Итак, всё же часть третья. Колдовство с контроллером.
Для того, чтобы научить нашу “птичку” летать, нужно залить в контроллер прошивку и провести первичные калибровки. Для APM мы будем использовать программу Mission Planner.
Качаем, устанавливаем. Нужные драйвера должны встать сами вместе с программой.
Запускаем планнер.
Так выглядит его стартовый экран. Пока все параметры в нулях. Подключаем коптер через USB, но НЕ НАЖИМАЕМ кнопку Connect. В выпадающем списке портов должен появиться новый. Также важный момент: подключайте напрямую к компу, а не через хаб.
У меня в компе своих два, поэтому новым оказался COM4. У вас может быть какой-либо другой.
Нажимаем кнопку Initial setup, а затем кнопку Wizard.
Открывается окно, в котором у нас пойдет первичная настройка.
Шаг 1. Выбор типа нашего дрона. Здесь выбираем Мультиротор (думаю, без комментариев).
Шаг 2. Выбираем композицию. У меня классический типа X, квадрокоптер.
Шаг 3. Указание COM-порта. Здесь указано, что в диспетчере устройств COM-порт будет указан как “Arduino Mega 2560” (для APM) или “PX4 FMU” (для Pixhawk). Я заглянул в диспетчер – да, на 4 порте висит Arduino Mega 2560. Выбираем COM4, жмём Next, заливается прошивка.
При прошивке программа может сказать, что плата устаревшая, поэтому будет залита последняя выпущенная прошивка. Жмем ОК.
Шаг 4. Выбираем более конкретную раскладку коптера. Почему-то тот, что слева внизу, появился во второй раз о_О. Мой вариант – классический X-квадрокоптер.
Шаг 5. Калибровка акселерометра.
Если у вас будет включен звук, то каждую манипуляцию вам будет наговаривать экранный диктор. Сначала было стрёмно, потом смешно))) Нажимаем Start. Появится надпись:
Нужно будет поочередно расположить коптер в 6 разных плоскостях (после каждого замера жмем Continue):
– горизонтально (ставим на стол или на пол)
– на левый бок (желательно прислонить его к чему-либо вертикальному, так будет точнее), я прислонял к компу или шкафу. Аналогично для правого бока, носа и хвоста.
– кверху брюхом (переворачиваем и прислоняем к столу снизу).
Главное – не делать больших задержек (больше 20с примерно) между замерами, иначе придется калибровать заново.
Как сделали – переходим к компасу.
Шаг 6. Калибровка компаса. Компас (у меня совмещенный с GPS) должен быть в “боевом” состоянии (то есть установлен и зафиксирован).
Дальше жмем Live Calibration и начинается веселье: нам нужно этим самым компасом вокруг коптера описать сферу. То есть, мы держим коптер и поворачиваем его в разных плоскостях.. На экране на координатном пространстве будет рисоваться сфера:
И таким манером крутим коптер, пока не наберется нужное количество точек. Чтобы быстрее набралось – стараемся накрыть белые точки. Появится подобное окошко – всё хорошо, идем дальше:
Переходим к питанию:
Шаг 7. Вводим данные по тому, как у нас идет питание. У меня такая же девайсина, как на картинке, для нее настройки я указал. Выставляем также емкость аккумуляторов.
Следующим шагом программа спросит, есть ли сонар – пропускаем и переходим к радиоаппаратуре. Видим вот такое:
Затем включаем пульт (процедуру привязки и настройки аппы лучше гуглить отдельно для своей аппаратуры и приемника) и жмем Continue:
Шаг 8. Проверка аппаратуры: дергаем стики в разные стороны, реагирует ли аппаратура на дергания стиков, и правильно ли их воспринимает. Правильным результатом будет Throttle на левом стике вперед-назад, Yaw на нем же вправо-влево, Pitch на правом вперед-назад, и Roll на нем же вправо-влево. Конечные значения должны быть примерно 980-1000 для минимума, 2000-2020 для максимума. Если у вас не так – жмем Calibrate Radio и гоняем все стики в крайние положения, затем жмем ОК.
У меня на 5 канале стоит шестипозиционная комбинация двух стиков – это я делал для полетных режимов. Это тоже берем из мануалов к своей аппаратуре. Для начала можно не морочиться и просто назначить три режима одному тумблеру.
Шаг 9. Установка режимов. Я себе поставил набор, как на картинке.
RTL – это возвращение домой и посадка (на случай, если потеряю его в небе, один раз этот режим спас мне коптер). Коптер выходит на высоту 15 метров, на ней возвращается по прямой к координатам вылета, спускается на высоту 3 метра, затем переключается в режим плавной посадки;
Land – это просто посадка (чтобы с непривычки не ахнуть его об землю);
Loiter – режим удержания точки;
Althold – режим удержания высоты;
Stabilize – самый обычный режим полета со стабилизацией по горизонту.
Зеленый курсор показывает, какой режим сейчас выставлен на аппаратуре (именно поэтому у меня такой бардак в их последовательности). Меняем режим на аппаратуре – выставляем то, что предназначается текущему положению назначенного переключателя. В конце проходим по всем, проверяем и жмем Save Modes.
Шаг 10. Проверяем настройки. Если у вас рабочий стол не у окна, то, скорее всего, GPS найден не будет, так что первая плашка останется красной. В противном случае – будет зеленой.
Проверяем, не установлены ли у нас пропеллеры и пробуем заармить (запустить) моторы. Для этого стики на аппаратуре уводим до упора вниз и друг к другу.
К слову, для дизарма (отключения) моторов делаем тоже самое, но стики направляем друг от друга.
Последняя плашка должна стать зеленой. Жмем Next.
Шаг 11. Настройка Failsafe. Здесь мы выбираем поведение коптера в нештатной ситуации (садится батарея, потеряна связь с наземной станцией, потеряно значение “газа”).
В первом случае я даю установку на возврат домой,
во втором – смысла никакого, т.к. у меня не наземная станция,
в третьем – отключение передатчика (аппаратуры) – тоже возврат домой.
Шаг 12 для тех, кто боится потерять коптер до получения необходимых навыков – настройка “купола”, за который коптер не сможет улететь.
Здесь всё просто – при установленной галке ставим параметры, ограничивающие полет: высота, радиус, высота, на которой он будет возвращаться домой в режиме RTL.
На этом первичная настройка контроллера закончена. Жмем Next до упора и отключаем коптер от компьютера.
К настройкам можно будет всегда вернуться в разделе Initial setup (для этого коптер подключаем по USB и жмем Connect, если не поключается, играем скоростью – это параметр в выпадающем списке рядом с COM-портами) в меню Mandatory Hardware:
Теперь пара слов о калибровке регуляторов. Эта процедура нужна для того, чтобы ваши регуляторы понимали, какому положению стика газа соответствуют определенные обороты моторов. ВАЖНО: калибровку проводить только со снятыми пропеллерами!
1. Включаем пульт и переводим стик газа в крайнее верхнее положение.
2. Подключаем аккумулятор. Контроллер будет моргать желтым, красным и синим.
3. Отключаем аккумулятор и снова подключаем. Регуляторы издадут несколько серий сигналов:
сначала количество банок аккумулятора (у меня 4), затем ещё дважды (это сигнал, что максимальный газ записан).
4. Переводим газ в крайнее нижнее положение. Регуляторы дадут длинный сигнал, подтверждая, что минимальный газ записан и калибровка окончена.
5. Плавно поднимаем газ – моторы начнут вращаться, набирая обороты по мере набора газа.
На этом всё! Всем ещё раз спасибо за терпение и внимание!
Искренне ваш,
Аппаратура управления и камера
Пульт дистанционного управления имеет профессиональный вид. Кроме того левша и правша смогут настроить управление под себя. Монохромный дисплей показывает важную информацию, разобраться нетрудно.
Внешний вид
MJX X101 обладает большим 350 размером, поэтому приспособлен только для полётов на улице. Прищуренный злой взгляд и немалые габариты вызывают уважение, и невольно кажется что аппарат стоит намного дороже. Это как взгляд BMW в зеркале заднего вида). Квадрокоптер оснащён подсветкой, если быть точнее, то яркие светодиоды расположены внутри его полупрозрачных осей.
Видимость квадрокоптера ночью
Внешний вид и комплектация
В народе квадрокоптер MJX X101 прозвали «убийцей» Syma X8G, так как по характеристикам он вполне способен конкурировать с X8G.

В длину и ширину, параметры устройства составляют около 50 см, а высотой дрон – 18 см. Весит аппарат 420 грамм. На коптер установлены коллекторные моторы обеспечивающие хорошую тягу и способные поднимать камеру GoPro или аналогичную ей. Максимальная скорость полета составляет 45 км/час.
Дрон оснащен подсветкой – спереди красной, сзади голубой. Можно полетать ночью, но особо далеко отпускать квадрокоптер не советуем.

X101 поставляется с демпфированным подвесом, который призван стабилизировать изображение. Подвес без стабилизации по осям, поэтому во время крена дрона камера также наклоняется. В подвес интегрирована площадка под аккумулятор.

В комплектацию дрона входит:
- Квадрокоптер MJX X101
- Аппаратура управления
- Аккумулятор LiPo 2s 1200 mAh
- Зарядка
- Шасси
- 2 комплекта винтов
- Защита винтов
- Отвёртка инструкция (на английском языке)
MJX X101 инструкция на русском языке
Внешний вид и характеристики
X101 имеет достаточно большие размеры: в длину и ширину 500 мм, в высоту 180 мм, при весе в 420 грамм.
Подобно многим моделям таких габаритов MJX X101 использует шасси большой высоты с применением бамперов для улучшения защиты пропеллеров. Бамперы имеют сложную трехлучевую конфигурацию.
Корпус окрашен в чисто-белый цвет. В передней части находится светодиодная подсветка по форме напоминающая глаза.
На нижней стороне лучей коптера находятся яркие светодиоды, благодаря которым его хорошо видно в темное время суток.
Большинство деталей сделано из крепкого пластика или металла, в том числе аккумуляторный отсек. Из-за того, что аккумулятор при продолжительном использовании сильно нагревается производитель вынес его наружу, создав тем самым естественную систему охлаждения.
В целях экономии пространства и уменьшения веса квадрокоптера, аккумулятор совмещён с подвесом, имеющем демпферы стабилизирующие изображение, получаемое с камеры.
X101 имеет мощные моторы, обладающие грузоподъёмностью, достаточной чтобы поднять камеру GoPro.
Где должна происходить калибровка?
Калибровка квадрокоптера осуществляется на высоте более полуметра. Так и безопаснее, и ничего не мешает. Калибровать удобней всего при безветрии.
Для чего нужна калибровка квадрокоптера
Дрон в полёте может клониться в стороны и крутиться по кругу. Неправильная настройка квадракоптера может привести к несчастному случаю, Вы можете нанести телесные травмы себе и окружающим или испортить чьё нибудь имущество и вся ответственность ляжет на оператора который управлял данным аппаратом. Так что с помощью триммирование квадрокоптера Вы сможете его настроить и избежать непредвиденных ситуаций.
Как выявить откалиброван квадрокоптер или нет
Довольно просто: произведите тестовый полет. Если траектория движения квадрокоптера меняется хаотично, значит, ему необходимо триммирование.
Начинается процесс калибровки с проверки джойстиков. Включите пульт управления. Обычно правая часть отвечает за вертикальное управление, левая – горизонтальное. Далее поднимите дрон в воздух, можно на полметра. А теперь попробуйте задать ему направление. Кренит в правую сторону. Проведите регулировку по левому стику. Клонит вниз. Тогда откалибруйте по правому стику.
На данном этапе важно понять, какой настройкой вы будете пользоваться.
Есть два варианта:
- Первый – механическая калибровка. Используется тогда, когда отклонение не очень значительно, и представляет собой подкручивание регулятора тяги.
- Второй вариант – автоматическая калибровка. Применяется при необходимости смещения триммера на 5 и более позиций. Представляет собой настройку работы дрона непосредственно с пульта управления.
Как откалибровать квадрокоптер syma x5c
Для начала изучите кнопки пульта управления, за что каждая отвечает, функционал. Включите коптер. Для этого переводим в режим «On» задвижку на самом дроне. Затем включаем пульт и тянем левый стик вниз (до упора).
https://www.youtube.com/watch?v=ThbRofNnCP8
Теперь наберите высоту и отследите, в каком направлении «заносит» ваш коптер. Если видите, что есть проблема, попробуйте сбросить настройки. Для этого нужно установить дрон на плоскую ровную площадку, включить, потянуть левый и правый стики вниз и налево. Подождите, пока настроится гироскоп. Затем сделайте то же самое, но направо (калибровка акселерометра).
Проведите повторный запуск коптера. Не помогло? Тогда приступаем к следующему этапу – триммированию (изменению оборотов мотора).
Какие кнопки есть на пульте управления syma x5c
- Левый и правый стики (джойстики);
- Переключение режимов (слева от левого стика);
- Поворот на 360 градусов (справа наверху);
- Переключатель «вперед-назад» (слева от правого стика);
- Переключатель режимов (под правым стиком);
- Кнопка «вкл-выкл» (в центре, над дисплеем).
Камера
Камера в комплект не входит, ее придется приобрести отдельно. Обычно это FPV камеры C4008 или C4010, они снимают в режиме настоящего времени, а за съемкой можно следить со смартфона.

Для того чтобы работать с камерой нужно установить специальное приложение MJX FPV, которое будет подключено через Wi-Fi к каналу дрона, после чего на дисплее появится изображение.
В процессе съемок, будут создаваться две записи разного качества. Первая — транслируется на смартфоне, и она значительно хуже по качеству, чем запись на карте памяти, так что в сохраненных файлах картинка будет более четкая.
Можно выбрать и более бюджетный вариант, например, С4005.
Если вы рассчитываете получить по-настоящему хорошее качество видео, можно установить GoPro или любой аналог, например, gitup git2.
Камера и качество съёмки
MJX X101 оборудован подвесом, конструкция которого предусматривает вставки из силикона, уменьшающие вибрацию. Это дает возможность снизить тряску камеры и увеличить четкость изображения.
Базовая комплектация квадрокоптера содержит крепеж для экшн-камер, однако самой видеокамеры в комплекте нет.
Способность MJX X101 поднимать грузы до 200 г даёт возможность в отличие от других менее мощных моделей оснастить его настоящей экшн-камерой, способной выдерживать максимальные нагрузки и выполнять съёмку в высоком качестве.
При установке такой камеры отпадает необходимость подачи на неё питания от батареи коптера, что существенно уменьшает расход энергии и увеличивает длительность полёта.
На X101 можно установить FPV камеру, обеспечивающую видеотрансляцию на мобильное устройство. Управлять записью видеороликов можно через бесплатное мобильное приложение.
MJX предлагает установить одну из следующих FPV камер:
Помимо камеры для съёмки от первого лица, на коптер можно установить одну из экшен-камер: GoPro, XiaomiYi, Runcam, Mobius, SJCAM.
Видео съемка с камеры GoPro.
Камера C4005 довольно хорошо снимает объекты, находящихся на удалении до 10 метров. Более отдалённые объекты получаются с искажениями. Поэтому видеоролики, полученные с высоты, превышающей 10 метров, получаются нечёткими. Из-за этого недостатка, область применения камеры сужается до любительской съёмки.
Видео съемка с камеры C4008
Из-за того, что изображение передаётся с камеры на смартфон по wifi соединению, видео получается с помехами и задержками.
Квадрокоптер mjx x101 бюджетный, но поднимает экшн-камеру
После долгих попыток задушить в себе зеленое существо, получилось сделать это и приобрести «взрослый» экземпляр квадрокоптера. Выбор пал на MJX X101 на Алиэкспресс без камеры, ввиду приятной цены, возможности прицепить и главное поднять экшн-камеру (имеется в наличии SJCAM SJ5000 WiFi). За подробностями под кат
Товар был заказан во время акции, сейчас ценник немного выше.
Доставка до Нижнего Новгорода заняла порядка 8 дней, что не может не радовать, при условии, что посылка была отправлена обычной почтовой службой (AliExpress Standard Shipping).
Прохождение трека:
Упакована коробка была в серый пакет, сама коробка пенопластовая. Вес с упаковкой около килограмма (1084 грамма). Приехала посылка в таком виде:
Почта России немного потрепала упаковку, но к моему счастью, содержимое не пострадало. Упаковка была на троечку, крышка пенопластовой коробки была очень плохо зафиксирована скотчем.
Заказывал комплектацию без FPV камеры, т.к. имел в наличии экшн-камеру с возможностью трансляции видео по WiFi на экран мобильного телефона (SJCAM SJ5000 WiFi). Продавец положил в комплект крепление для экшн-камеры (которое по факту не подошло). В итоге получил следующий набор в комплекте:
Также возможно приобретение камеры с возможностью трансляции видео по WiFi на телефон и управлением со штатного пульта, камера подходящяя для данного квадрокоптера C4008 ссылки на эту камеру с Али:
1.
С4008
у того же продавца, где брал квадрик
Приехал в такой коробке:
Сборка заняла около 15 минут, не торопясь (монтаж лопастей, монтаж ног, установка аккумулятора). Аккумулятор пришел практически полностью заряженный, на зарядке простоял минут 5-7. На заряднике имеется двухцветный индикатор, во время процесса зарядки горит красным, после того, как зарядка завершена, начинает гореть зеленым.
Пульт
Пульт выглядит достаточно массивным, но удобно лежит в руках. Питается от трех элементов формата АА. Имеется дисплей для отображения текущих настроек. Без подсветки.
Зявленный радиус работы порядка 100 метров на частоте 2.4Ghz. Имеется множество кнопок для настройки и управления, а именно:
- Кнопка «Домой» — возвращает коптер к пульту (работает только при включении полета в режиме headless)
- Кнопка «КамераФлипыHeadless» — при подключенной камере — управляет камерой, при отключенной камере позволяет делать «флипы», при нажатии и удержании в течение 3 секунд, включается режим Headless — «безголовый режим» — позволяет управлять коптером в независимости от того, какой стороной он повернут, т.е. при нажатии стика «вперед» — коптер полетит вперед (от пульта), вне зависимости от того, в какую сторону он направлен
- Кнопки триммирования (газ, вращение вокруг своей оси, лево-право)
- Регулятор мощностью — для новичков подойдет самый слабый режим, для профессионалов максимальный
- Кнопка переключения mode1 и mode2

Остальные фото и тестовый полет (видео загружу позже, погода плохая, на улице летать не вариант):
По традиции котэ:
Просьба сильно не пинать, т.к. первый обзор. В комментариях жду критики и того, что необходимо добавить.
Комплект поставки
Покупатель получает квадрокоптер в собранном виде. Он полностью готов к выполнению полётов.
Поставляется квадрокоптер в небольшой белой коробке.
Комплектация:
Комплектация
- Инструкция;
- Квадрокоптер;
- Защита на винты;
- Шасси;
- Зарядное устройство;
- Отвертка с винтами;
- Винты 4 4 запасных;
- Аппаратура управления;
- Подвес;
- Аккумуляторная батарея.
Коптер в воздухе
Полет на одном аккумуляторе Li-Po длиться до 15 минут, в зависимости от нагрузки. Для того чтобы полностью восстановить энергию потребуется 2,5 часа подзарядки. Как только в аккумуляторе будет минимум энергии, система предупредит вас об этом, подав звук, что позволит вовремя вернуть квадр на исходную.
Летает MJX X101 достаточно стабильно, 6 осевой гироскоп хорошо справляется со своей задачей.
Доступно три режима полета: низкий, средний и высокий. В зависимости от режима скорость дрона и будет выше или ниже, а наклоны соответственно круче или плавнее.
Если вы новичок, рекомендуем начинать с низкого режима полета.
https://www.youtube.com/watch?v=whZkdqaGlK0
Есть безголовый режим полета (HeadLess) и возврат в точку старта нажатием одной кнопки.

Будьте осторожны, модель не содержит GPS, поэтому возврат не всегда может корректно работать.
Если вам скучно просто летать, можете поделать флипы, MJX X101 это тоже умеет.
Краткое руководство пользователя для готового к полетам коптера (rtf)
Это руководство быстрого старта для пользователей. прошивка квадрокоптер уже загружена на APM 2.6
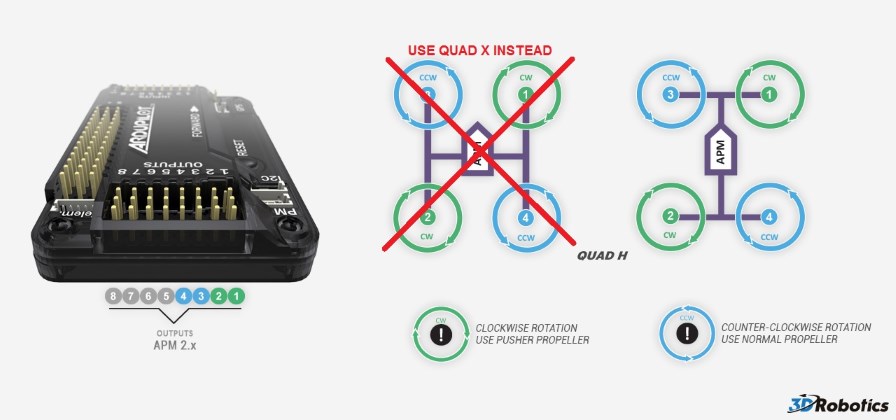
Крепление пропеллеров
Винты должны быть прекреплены в соотвествии с конфигурацией,
они устанавливаются в самую последнюю очередь ,
после того, как все настроено.
ниже приводится схема и направление пропеллеров
и стороны кручения моторов.
Конфигурация квадрокоптер X и Plus

Конфигурация квадрокоптер H рама
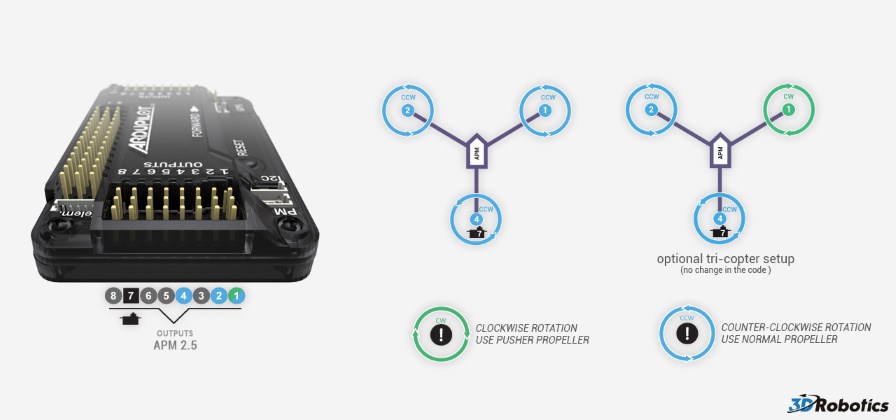
Конфигурация трикоптер
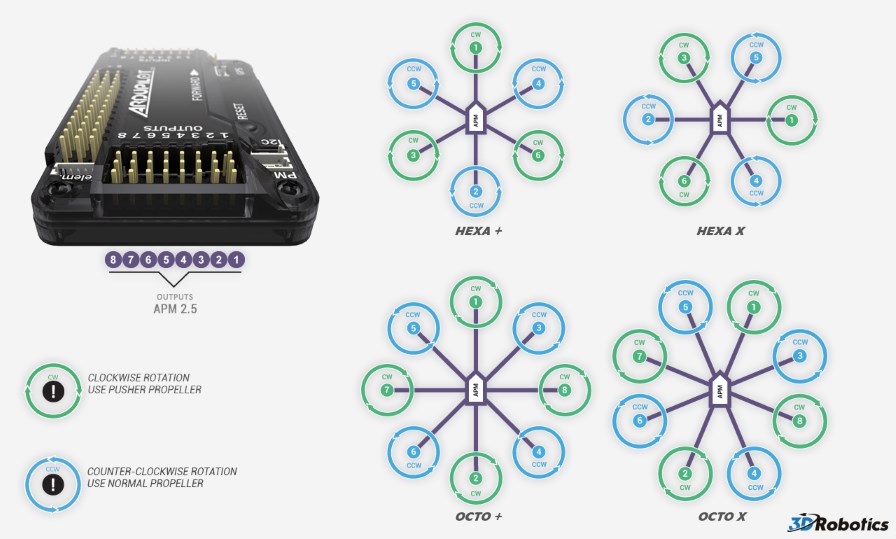
Конфигурация гексакоптер и октакоптер
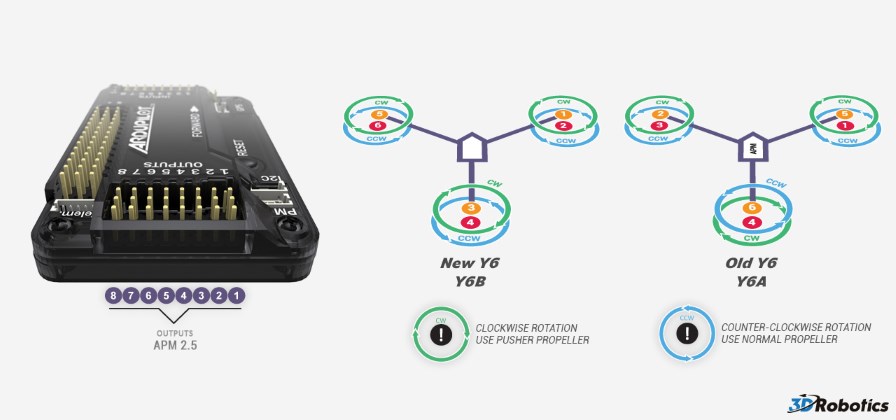
Конфигурация трикоптер Y6
Конфигурация квадрокоптер X8

Лётные характеристики
https://www.youtube.com/watch?v=kEF0EgohqC0
При помощи моторов без сердечника квадрокоптер MJX X101 обладает хорошей тягой и стабильным управлением. Он способен для более качественной съёмки и готов поднять в воздух профессиональную экшн-камеру. Именно за эту особенность у MJX X101 появилось огромное количество поклонников.
Максимальное время полёта при условии что аккумулятор полностью заряжен, составляет 10 минут. Если вы не докупили дополнительный аккумулятор, то придётся подождать ещё 90 минут чтоб снова полетать. Максимальная дистанция на которой с комфортом можно управлять дроном составляет 200 метров. В ветер квадрокоптер немного сносит, но не критично.
Что касается FPV полётов, тут есть нарекания. Картинка на экране гаджета показывается с задержкой. Придаёт управлению некий дискомфорт и неуверенность. Это не удивительно, так как сигнал идёт через WI-FI. Цена квадрокоптера с GPS была бы намного дороже.
Общее впечатление
Квадрокоптер MJX X101 представляется идеальным решением для людей, которые хотели бы за сравнительно небольшие деньги попробовать себя в роли пилота, выполняющего фигуры высшего пилотажа.
Корпус устройства достаточно прочный, может выдержать падения с небольшой высоты.
Несмотря на то что у MJX X101 нет того функционала, которым обладают профессиональные квадрокоптеры, в своём ценовом сегменте X101 является единственным дроном, оборудованным GPS.
Благодаря лёгкости управления, квадрокоптер стал незаменим для неопытных пилотов. С X101 вы освоите видеосъёмку, если дополнительно закажите камеру C4008.
Подготовка квадрокоптера к полёту
Если у вас дрон, «готовый к полёту» — настраивайте лишь гироскоп и навигационную систему. Самодельный беспилотник придётся настраивать дольше.
Для этого нужно проделать следующие шаги
- Привяжите ПДУ (Пульт Дистанционного Управления).
- Настройте характеристики тяги при помощи соответствующей программы (подойдёт тот же mission planer, который мы упоминали).
- Настройте навигационную систему и гироскоп.
- Запустите на высоту полметра, при надобности, подкрутите регуляторы оборотов.
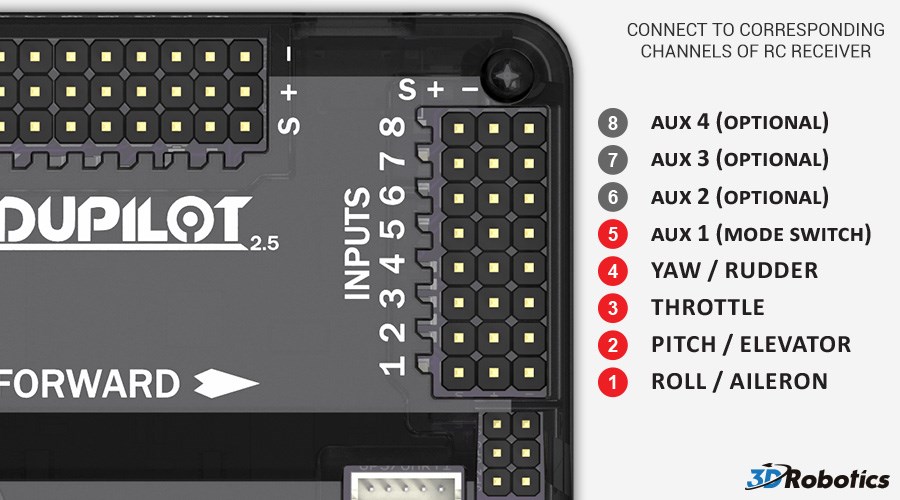
Подключите радиоприемник: pwm или ppm сигналы
- для управления по радио через ШИМ (PWM) подключите радиоприемник к APM входных сигнальных контактов используя разъемы для подключения канала 1 к APM сигнала конекторами с надпиьсь 1 , канал 2 к конекторам 2 и т.д. Кроме того, необходимо убедиться в том, что приемник будет питаться от APM.
- для управления по радио через PPM необходимо подключить первый канал и перемкнуть перемычкой входы 2 и 3 , как показано на картинке. Выводы на приемнике могут варьироваться , поэтому обратитесь к документации на ваш приемник.
После скачивания и установки Mission Planner на вашу наземную станцию, подключите APM к компьютеру используя микро-USB провод.
Не подключайте провод к USB-хабу , подключайте провод к компьютеру.

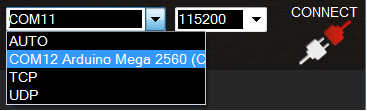
После установки Mission Planner подключите через micro-USB APM с системой Windows, которая автоматически определит
и предоставит драйвера для устройства, запустите программное обеспечение и выберите порт который будет указан
в списке, выберите необходимую скорость (по умолчанию это 115200 бод/с) как показано на рисунке
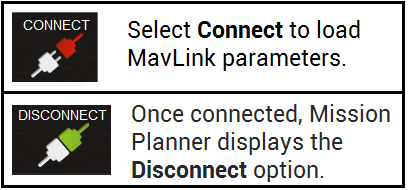
Выберите “соединение” в правом вверхнем углу экрана ,
что бы загрузить параметры MAVLINK в APM ,
Mission Planner будет показывать окно с параметрами загрузки данных.

Когда инициализация параметров пройдёт окно загрузки пропадёт.
Включите передатчик и убедитесь, что он в режиме самолета
(Полетному контроллеру необходим режим полета , независимо от платформы на
эксперементальной основе) и установите все стики по центру.

Левая ручка будет контролировать газ (THR) и рысканья (Yaw),
правая будет контролировать крен (Roll) и тангаж (Pitch) .
Трехпозиционный переключатель будет контролировать режимы полета.
В Mission Planner выберите “Radio Calibrating” ,
нажмите на “калибровка” и правом нижнем углу,
Mission Planner выведет окно,
что батарея не должна быть подключена ,
как и моторы с пропеллерами.
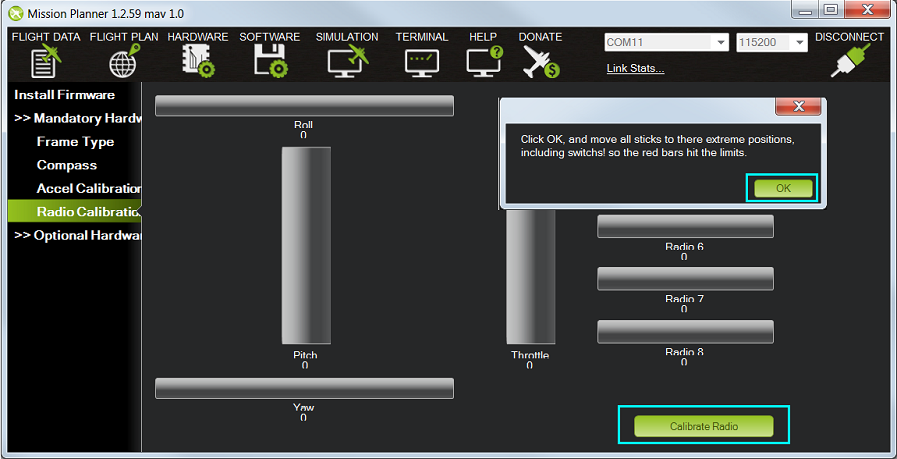
Нажмите “ок” и начните двигать стиками в каждую из сторон до предела,
а так же трехпозиционный тумблер. наблюдайте за результатами,
красные линии установят пределы минимамльного и максимального
значения вашего радиопередатчика.
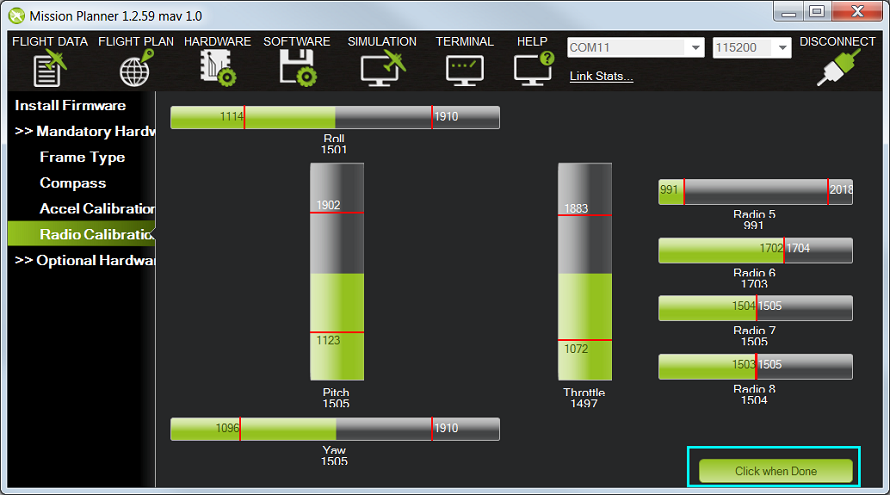
Когда все значения каналов радио смогли показать свой
минимум и максимум нажмите в программе “Done”.
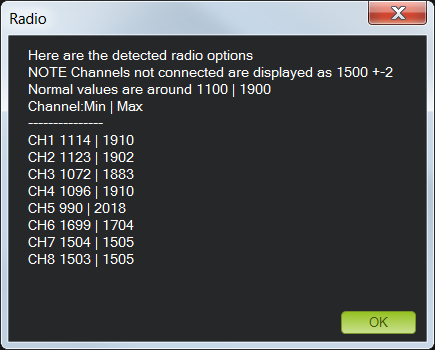
Данные вам отобразятся в отдельном окне,
нормальное значение около 1100 для минимума и 1900 для максимума.
Предполетная информация
Безопасность это ключ в успешном полете. Пожалуйста изучите информацию по безопасным полетам перед полетами.
Выберите безопасную площадку для полетов подальше от людей и всегда проверяйте работу всех органов управления и крепления перед подключением батареи.
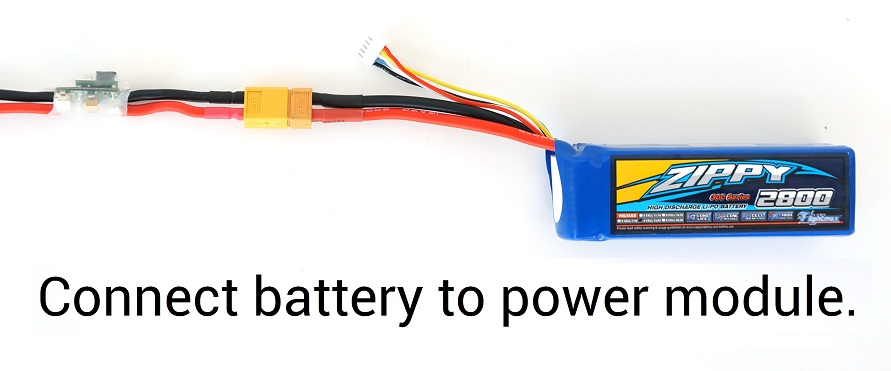
Когда все готово для полетов , установите квадрокоптер на взлетной площадке лицом от вас. Подключите заранее заряженную LiPO батарейку к разъемам. Следуйте
безопасному снятию с охраны, что бы это не повлекло “сумашедший полет” (вики)
Последнее это подключение батарейки (предварительно включив аппаратуру со стиком газа утопленного в минимум)
Пульт управления
Пульт работает на частоте 2,4 ГГц Связь поддерживается на расстоянии 100 метров. Прибор работает с помощью 3 батареек АА, мощностью 1,5 V.
Интересная особенность пульта: с правой стороны есть колесико, которое может регулировать мощность дрона.

Решение проблем с пду или джойстиком
https://www.youtube.com/watch?v=V9OCw20nLy0
Потребуется тримминг. Ранее мы об этом упоминали. Как выяснить, какой стик следует настроить:
- Дайте дрону команду на взлёт. Если он будет крениться на правую сторону – триммируйте крен правого рычага.
- Если клонится вперёд-назад – правьте левый рычаг, при помощи триммера тангажа.
- В случае, если дрон летит диагонально – работайте с обоими стиками.
Синхронизация пульта с коптером
Здесь вам поможет инструкция к модели вашего дрона. Для примера: для трёхостного коптера достаточно включить ПДУ (Пульт Дистанционного Управления) и подождать 10 секунд. Короткие звуковые сигналы с длинным сигналом в конце означают, что пульт успешно синхронизировался.
Для лучшего понимания прочитанного советуем посмотреть подробные видео-инструкции, расположенные ниже. Если у вас ещё остались вопросы или что-то пошло не так – не стесняйтесь написать об этом в комментариях, мы постараемся вам помочь.
В случае, если дрон продолжает плохо слушаться команд или не выдаётся должная мощность – перепроверьте саму комплектацию. Возможно, что вы где-то неправильно подключили, идёт слабый контакт или выбраны неверные регуляторы оборотов.
На этом у нас всё. Не забудьте подписаться на нас в социальных сетях.
Напоследок хотим пожелать, чтобы у вас всё получится с первого раза, и вы успешно осваивали новые высоты.
Следует ли калибровать квадрокоптер?
Чтобы это понять, поднимите его на высоту и попробуйте полетать. Команда «вперёд» даёт на дрон сигнал лететь строго вперёд, без наклонов в какие-либо стороны. Точно так же проверить и другие направления. Если нарушения при полёте были выявлены – не стоит откладывать дело в долгий ящик, надо действовать.
Следующие шаги
Постепенно изучайте беспилотные полетные режимы, для получение всех возможностей от ArduCopter, включая режимы Loiter и полет по точкам
Типы калибровки
Существует 3 типа калибровки:
- Механическая – её используют в случае, если отклонение от необходимой оси не слишком большое. Осуществляется путём подкручивания регулятора тяги коптера.
- Автоматическая – осуществляется настройкой аппарата с пульта управления. Нужна, если требуется сместить триммер на 5 позиций или больше. Калибровка зависит от пульта и контроллера, так что без мануала тут не обойтись.
- При помощи программного обеспечения mission planer. Программа заточена для работы с платами Ardupilot. Все необходимые настройки задаются программно. Обычно производится перед первым полётом собранного дрона.
Для калибровки выполните следующие действия
- Включите передатчик радиоуправления (само радиоуправление должно быть отлажено). Выставьте ручку газа на всю.
- Возьмите Li-Po аккумулятор и подключите к разъёму Power-модуля, чтобы включить автопилот.
- Далее APM начнёт моргать красными и синими светодиодами. Это значит, что он готов для калибровки после следующего включения. Отключите аккумулятор от APM.
- Опять включите питание. Регуляторы издадут стандартный сигнал (число сигналов равно числу банок в батарее), а после издадут двойной короткий сигнал, подтверждающий калибровку по максимальной скорости.
- Опустите ручку газа до минимального положения. Один длинный сигнал – откалибровано по минимальной скорости.
- Теперь регуляторы для APM8 успешно откалиброваны. Можете проверить работу моторов.
- Уберите газ на минимальное состояние и выключите питание Ardupilot.
Триммирование квадрокоптера
Простые правила:
- По рудеру. Если коптер кренится в правую сторону, то нужно триммировать влево. И наоборот;
- По тангажу. Видите, что дрон при полете кивает вперед, триммируйте назад. Кренит назад – триммируйте вперед.
Попробуйте сделать «флип» — 360-градусный разворот коптера по любому из четырех основных направлений. Для этого нажимаем одновременно верхнюю кнопку, и тянем правый стик в необходимую сторону.
При триммировании важно помнить, что у квадрокоптеров Syma разработчиками предусмотрена два режима расхода энергии (высокий – высокие обороты, низкий – слабые). В зависимости от того, как планируете использовать дрон, проверьте качество работы коптера на данных режимах.
Часто во время калибровки Syma X5C возникает проблема с неправильной установкой лопастей. Моторы могут функционировать на 100% верно, а пропеллер не крутится. В данном случае необходимо учитывать схему сборки и инструкцию, которые прилагаются к устройству.
Установите mission planner
перейдите на страницу загрузки и выберите самую последнюю версию.
Функциональность
- Несколько режимов расходов. Возможность регулировать отклик квадрокоптера при управлении.
- Флипы. Нажатием кнопки на аппаратуре управления квадрокоптер делает переворот на 360 градусов.
- Возврат домой. Нажатием кнопки на пульте MJX X101 возвращается на место взлёта.
- Headles mod. Если вы запутались в управлении этот режим вам на помощь. При его активировании у квадрокоптера появляется «зад» и «перед». Управлять становится гораздо проще.
Стоит учесть, что последние 2 функции MJX X101 выполняет с погрешностями, как и все квадрокоптеры без GPS.
Характеристики
- Размер: 50х50х18 см;
- Ёмкость аккумулятора: 7.4 V 1200 мА*час;
- Время полёта: 10 мин;
- Питание пульта: батарейки 3 х 1,5 АА;
- Время зарядки: 90 мин;
- Аппаратура: 2.4 ггц;
- Вес 420 гр;
- Удалённость полёта 200 м;
- 6 осевой гироскоп;
- FPV;
- Тип моторов: без сердечника.
Штатные fpv камеры имеют следующие характеристики
- MJX C4005-0.3 мп. FPV;
- MJX C4008-720P HD FPV;
- MJX C4009-1 мп FPV.
Заключение
Обзор MJX X101 наглядно показывает, что такой дрон будет отличным вариантом для новичков, так как им довольно легко управлять. Благодаря этому, можно получить базовые навыки пилотирования. Если докупите камеру, станут доступны FPV полеты с трансляцией на телефон. .
Не стоит забывать, что чем больше вы дадите нагрузку дрону, тем меньше времени он будет летать. Обычно в характеристиках описывают время полета без дополнительных грузов, но, если вы будете запускать беспилотник с камерой, батарея будет садиться быстрее. Поэтому стоит задуматься о покупке запасной батареи.
https://www.youtube.com/watch?v=_QOugexABag
Дрон без камеры обойдется вам в 60 USD.


, цена 4600 руб")




